Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Теоретичні відомості. Зміст 1. Мета роботи 2. Теоретичні
|
|
Зміст
| 1. | Мета роботи……………………………………………............... | |
| 2. | Теоретичні відомості…................................................................ | |
| 3. | Завдання…………………………………………………………. | |
| 4. | Опис лабораторного стенду…………………...……………….. | |
| 5. | Програмований логічний контролер Drive PLC EPL-10200… | |
| 6. | Запуск і порядок роботи з системою………….......................... | |
| 7. | Розрахункова частина лабораторної роботи............................. | |
| 8. | Зміст звіту……………………………………............................. | |
| 9. | Контрольні питання………………………………….................. | |
| 10. | Література……………….…......................................................... |
Мета роботи
Ознайомлення з принципом роботи широтно-імпульсного перетворювача та отримання механічних характеристик розімкненої та замкненої системи „Нереверсивний транзисторний перетворювач напруги – двигун постійного струму” (НТПН-ДПС).
Теоретичні відомості
Одним із способів регулювання напруги споживачів є метод імпульсного регулювання напруги. Існує два способи імпульсного регулювання: перший – широтно-імпульсна модуляція напруги (ШІМ) – зміна інтервалу провідності ключа при постійній частоті включення, другий – частотно-імпульсна модуляція напруги (ЧІМ) – зміна частоти перемикань при постійному інтервалі провідності. При цьому регулюється відносний час провідності ключа, від чого в свою чергу залежить велична середньої напруги на навантаженні.
Перетворювачі що дозволяють здійснювати широтно-імпульсне регулювання напруги на навантаженні називають широтно-імпульсним перетворювачем (ШІП)
Класифікація ШІП постійної напруги:
1) Залежно від можливості зміни полярності напруги на навантаженні ШІП поділяються на:
– реверсивні, що перетворюють напругу в імпульсну з постійною амплітудою, різною тривалістю й полярністю за один період;
– нереверсивні, що перетворюють напругу в імпульсну з постійною амплітудою й полярністю, але різною тривалістю.
Нереверсивні ШІП діляться на паралельні й послідовні.
У послідовних вентиль включається послідовно навантаженню, при цьому напругу на навантаженні одержують не вище вхідної. У паралельних ШІП робочий вентиль включається паралельно навантаженню. Характерною рисою паралельних ШІП є можливість одержання на навантаженні напруги вище напруги живлення, однак такі перетворювачі потребують встановлення накопичувачів енергії (дроселів).
2) Залежно від способів комутації ШІП розрізняються на:
– ШІП із залежними вузлами комутації (залежні);
– ШІП з автономними вузлами комутації (незалежні).
Функціональна схема та часові діаграми роботи нереверсивного послідовного широтно-імпульсного перетворювача представлені на рис. 1.
| 
|
| а) | б) |
Рисунок 1 – Схема нереверсивного ШІП (а) та його часові
діаграми роботи (б)
При аналізі широтно-імпульсних перетворювачів будемо вважати що: вентилі є ідеальними ключами із часом перемикання що наближається до нуля, внутрішній опір джерела дорівнює нулю.
Робота ШІП на активно-індуктивне навантаження. Для захисту вентиля від перенапруг на вході ШІП ставиться фільтр.
Середнє значення напруги на навантаженні:
 , (1)
, (1)
де  - коефіцієнт заповнення імпульсів,
- коефіцієнт заповнення імпульсів,  – час включеного стану вентилю,
– час включеного стану вентилю,  – цикл роботи ШІП.
– цикл роботи ШІП.
ШІП найбільшою мірою задовольняють основним вимогам, що пред'являються до напівпровідникових перетворювачів систем електроприводу:
– одержання хороших статичних і динамічних характеристик електропривода в цілому;
– практична відсутність зони переривчастих струмів;
– достатня перевантажувальна здатність для забезпечення форсування в перехідних режимах роботи електропривода;
– високий ККД;
– жорсткість зовнішньої характеристики і мала інерційність;
– висока перешкодозахищеність і надійність;
– мала маса і габарити;
– практична відсутність впливу на мережу живлення.
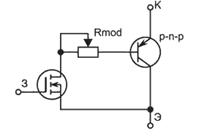
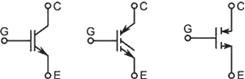
Силова частина перетворювача побудована на основі UltraFast IGBT транзисторного ключа. IGBT (Insulated Gate Bipolar Transistor) – являє собою біполярний p-n-p транзистор, керований від порівняно низьковольтного MOSFET-транзистора (MOSFET – польові транзистори з ізольованим затвором) з індукованим каналом (рис. 2).
| 
|
| а) | б) |
Рисунок 2 –Еквівалентна схема ІGBT транзистора (а) та його умовно-графічні позначення (б)
Узагальнена функциональна схема системи керування швидкістю ДПС з НЗ за структурою з підсумовуючим підсилювачем представлена на рис.3.
Рисунок 3 - Функціональна схема системи керування електроприводом
Якірна обмотка двигуна М живиться від нереверсивного транзисторного перетворювача напруги UZ.  – напруга на виході випрямляча,
– напруга на виході випрямляча,  – вхідна напруга випрямляча (напруга завдання випрямляча). Характерною особливістю структури з підсумовуючим підсилювачем є те, що формується як вихідний сигнал підсилювача з коефіцієнтом підсилення
– вхідна напруга випрямляча (напруга завдання випрямляча). Характерною особливістю структури з підсумовуючим підсилювачем є те, що формується як вихідний сигнал підсилювача з коефіцієнтом підсилення  , на вхід якого подається сумарний сигнал напруг завдання швидкості
, на вхід якого подається сумарний сигнал напруг завдання швидкості  та зворотних зв’язків за струмом якоря
та зворотних зв’язків за струмом якоря  і швидкості
і швидкості  . формується за допомогою шунта RS. Використовується або додатний, або від’ємний зворотний зв’язок за струмом (додатному на рис.3 відповідає знак „+”, від’ємному – „-”). формується за допомогою тахогенератора. Використовують, як правило, лише від’ємний зворотний зв’язок за швидкістю.
. формується за допомогою шунта RS. Використовується або додатний, або від’ємний зворотний зв’язок за струмом (додатному на рис.3 відповідає знак „+”, від’ємному – „-”). формується за допомогою тахогенератора. Використовують, як правило, лише від’ємний зворотний зв’язок за швидкістю.
Робоча характеристика перетворювача в статичному режимі апроксимується прямою
 , (2)
, (2)
де I – струм перетворювача (якоря двигуна); RП – внутрішній опір перетворювача; KПР – коефіцієнт передачі перетворювача без навантаження ( ).
).
В динаміці перетворювач апроксимується аперіодичною ланкою першого порядку.
 , (3)
, (3)
де Tμ – мала стала часу, яка визначається інерційністю фільтрів перетворювача та запізненням при відкриванні тиристорів.
Структурна схема системи керування на основі структурної схеми ДПС з НЗ та функціональної схеми рис.3 представлена на рис.4.
Рисунок 4 - Структурна схема системи керування
На рис.4 введені наступні позначення: KI, Kω – коефіцієнти зворотних зв’язків за струмом якоря та швидкістю. J – сумарний приведений до валу двигуна момент інерції установки; M – момент на валу двигуна;  – момент опору на валу двигуна;
– момент опору на валу двигуна;  – добуток конструктивної сталої двигуна і номінального потоку збудження;
– добуток конструктивної сталої двигуна і номінального потоку збудження;  – сумарний активний опір якірного кола;
– сумарний активний опір якірного кола;  – стала часу якірного кола.
– стала часу якірного кола.
На основі структурної схеми при p=0 можна отримати рівняння статичних характеристик
 , (4)
, (4)
де ω – швидкість обертання двигуна; верхній знак відповідає додатному зворотному зв’язку, нижній – від’ємному.
Розглянемо найбільш характерні випадки.
1. Розімкнена система керування (KI = 0, Kω = 0).
Рівняння (4) прийме вигляд
 , (5)
, (5)
де  - швидкість холостого ходу;
- швидкість холостого ходу;  - жорсткість електромеханічної характеристики.
- жорсткість електромеханічної характеристики.
Вигляд статичних характеристик представлено на рис.5.
Рисунок 5 - Статичні характеристики розімкненої системи керування
2. Система керування з додатним зворотним зв’язком за струмом ( ≠ 0, Kω = 0).
≠ 0, Kω = 0).
Рівняння (4) прийме вигляд:
 , (6)
, (6)
де  ;
;  .
.
 . (7)
. (7)
Швидкість холостого ходу двигуна при організації додатного зворотного зв’язку за струмом якоря не змінюється. Жорсткість в залежності від величини KI може бути від’ємною або додатною.
Умови абсолютної жорсткості електромеханічної характеристики ( ):
):
 . (8)
. (8)
При  ,
,  - характеристики абсолютно м’які.
- характеристики абсолютно м’які.
Статичні характеристики системи керування представлено на рис.6.
При = const і  < 0 система керування є нестійкою, тому на практиці обмежується граничною величиною (8).
< 0 система керування є нестійкою, тому на практиці обмежується граничною величиною (8).
Розглянемо фізику процесів. Нехай на валу двигуна збільшився момент опору . Тоді відповідно збільшився струм якоря I і зменшились швидкість ω і напруга перетворювача . Напруга  зросте, що викличе зростання і швидкості ω. В залежності від величини буде компенсовано якусь частину просідання швидкості, швидкість повернеться до попереднього значення або перевищить його (рознос).
зросте, що викличе зростання і швидкості ω. В залежності від величини буде компенсовано якусь частину просідання швидкості, швидкість повернеться до попереднього значення або перевищить його (рознос).
Рисунок 6 - Статичні характеристики системи керування з додатним зворотним зв’язком за струмом
3. Система керування з від’ємним зворотним зв’язком за швидкістю ( = 0, Kω ≠ 0)
Рівняння (4) прийме вигляд
 , (9)
, (9)
де  ;
;  .
.
Звідси можна зробити висновок, що:
 . (10)
. (10)
 . (11)
. (11)
При введенні від’ємного зворотного зв’язку за швидкістю швидкість холостого ходу двигуна зменшується, а жорсткість електромеханічної характеристики збільшується.
Гранична жорсткість характеристики
 . (12)
. (12)
Статичні характеристики представлені на рис.7.
Рисунок 7 - Статичні характеристики системи з від’ємним зворотним зв’язком за швидкістю
4. Система керування з від’ємним зворотним зв’язком за швидкістю та додатним за струмом ( ≠ 0, Kω ≠ 0)
Рівняння (4) прийме вигляд
 , (13)
, (13)
де  ;
;  .
.
 . (14)
. (14)
 . (15)
. (15)
Швидкість холостого ходу двигуна знижується за рахунок введення від’ємного зворотного зв’язку за швидкістю.
Абсолютна жорсткість досягається при
 . (16)
. (16)
Статичні характеристики представлені на рис.8.
Рисунок 8 - Статичні характеристики системи керування з від’ємним зворотним зв’язком за швидкістю та додатним за струмом
Напруги  вибрані такими, щоб усі характеристики виходили з однієї точки (0,
вибрані такими, щоб усі характеристики виходили з однієї точки (0,  ).
).
|
|