Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
В частотно-регульованих електроприводах використовують
|
|
АД загального призначення
двигуни постійного струму з паралельним збудженням
двигуни постійного струму з незалежним збудженням
спеціальні багатошвидкістні двигуни
72. Для сільськогосподарських машин і агрегатів розроблені частотно-регульовані двигуни з межами регулювання
частоти 150-600 Гц, а напруги 30 - 380 В
частоти 50-60 Гц, а напруги 30 - 380 В
частоти 50-60 Гц, а напруги 380 - 6000 В
частоти 5-60 Гц, а напруги 30 - 380 В
73. До якого способу регулювання відносяться дані механічні характеристики:
зміна числа пар полюсів
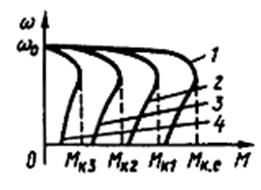
включення додаткових резисторів R2д у ланцюг ротора
включення додаткових резисторів R1д у ланцюг статора
зміна напруги живлення статора АД
74. До якого способу регулювання відносяться дані механічні характеристики:
включення додаткових резисторів R1д у ланцюг статора
зміна числа пар полюсів
включення додаткових резисторів R2д у ланцюг ротора
зміна напруги живлення статора АД
75. До якого способу регулювання відносяться дані механічні характеристики:
зміна числа пар полюсів
включення додаткових резисторів R1д у ланцюг статора
зміна напруги живлення статора АД
включення додаткових резисторів R2д у ланцюг ротора
76. До якого способу регулювання відносяться дані механічні характеристики:

зміна напруги живлення статора АД
включення додаткових резисторів R2д у ланцюг ротора
зміна числа пар полюсів
включення додаткових резисторів R1д у ланцюг статора
77. Аналіз характерних крапок штучних механічних характеристик: швидкість холостого ходу  не змінюється; крапки екстремуму Мк і sк – зменшуються, як і пусковий момент. До якого способу регулювання координат АД відноситься даний аналіз.
не змінюється; крапки екстремуму Мк і sк – зменшуються, як і пусковий момент. До якого способу регулювання координат АД відноситься даний аналіз.
включення додаткових резисторів R2д у ланцюг ротора
зміна напруги живлення статора АД
зміна числа пар полюсів
включення додаткових резисторів R1д у ланцюг статора
78. Аналіз характерних крапок штучних механічних характеристик: швидкість холостого ходу  не змінюється; не впливає на критичне ковзання sk, але суттєво змінює критичний момент Мк. До якого способу регулювання координат АД відноситься даний аналіз.
не змінюється; не впливає на критичне ковзання sk, але суттєво змінює критичний момент Мк. До якого способу регулювання координат АД відноситься даний аналіз.
зміна числа пар полюсів
включення додаткових резисторів R1д у ланцюг статора
включення додаткових резисторів R2д у ланцюг ротора
зміна напруги живлення статора АД
79. Аналіз характерних крапок штучних механічних характеристик: швидкість холостого ходу  не змінюється; пусковий момент можна підвищувати до критичного значення Мкпри одночасному зниженні пускового струму; критичний момент Мк залишається незмінним. До якого способу регулювання координат АД відноситься даний аналіз.
не змінюється; пусковий момент можна підвищувати до критичного значення Мкпри одночасному зниженні пускового струму; критичний момент Мк залишається незмінним. До якого способу регулювання координат АД відноситься даний аналіз.
зміна числа пар полюсів
включення додаткових резисторів R2д у ланцюг ротора
зміна напруги живлення статора АД
включення додаткових резисторів R1д у ланцюг статора
80. Аналіз характерних крапок штучних механічних характеристик: швидкість холостого ходу  змінюється вдвічі; пусковий момент зменшується; критичний момент Мк залишається незмінним. До якого способу регулювання координат АД відноситься даний аналіз.
змінюється вдвічі; пусковий момент зменшується; критичний момент Мк залишається незмінним. До якого способу регулювання координат АД відноситься даний аналіз.
включення додаткових резисторів R2д у ланцюг ротора
включення додаткових резисторів R1д у ланцюг статора
зміна числа пар полюсів (перемикання зірка - подвійна зірка)
зміна числа пар полюсів (перемикання трикутник - подвійна зірка)
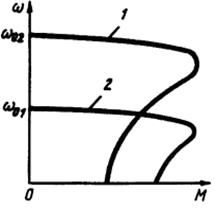
81. Представлені механічні характеристики отримані шляхом різного з’єднання фаз обмоток статора, яким чином:
зірка - подвійна зірка
трикутник – подвійна зірка
трикутник - зірка
подвійна зірка – потрійний трикутник
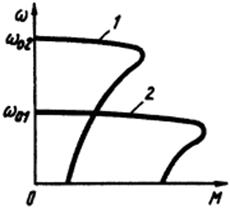
82. Представлені механічні характеристики отримані шляхом різного з’єднання фаз обмоток статора, яким чином:
трикутник – подвійна зірка
подвійна зірка – потрійний трикутник
зірка - подвійна зірка
трикутник - зірка
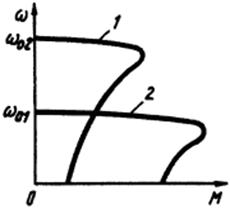
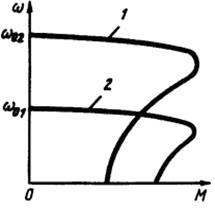
83. Представлені механічні характеристики отримані шляхом різного з’єднання фаз обмоток статора, визначте залежність характеристик від числа пар полюсів:
1 механічна характеристика має в 2 рази більше число пар полюсів, ніж 2
1 механічна характеристика має в 3 рази більше число пар полюсів, ніж 2
2 механічна характеристика має в 2 рази більше число пар полюсів, ніж 1
1 і 2 механічні характеристики мають однакове число пар полюсів
84. Представлені механічні характеристики отримані шляхом різного з’єднання фаз обмоток статора, визначте залежність характеристик від числа пар полюсів:
1 і 2 механічні характеристики мають однакове число пар полюсів
1 механічна характеристика має в 3 рази більше число пар полюсів, ніж 2
1 механічна характеристика має в 2 рази менше число пар полюсів, ніж 2
1 механічна характеристика має в 2 рази більше число пар полюсів, ніж 2
85. Який спосіб регулювання координат трифазного АД може бути реалізований тільки при використанні спеціальних АД, що одержали назву багатошвидкістних?
включення додаткових резисторів R2д у ланцюг ротора
включення додаткових резисторів R1д у ланцюг статора
зміна напруги живлення статора АД
зміна числа пар полюсів
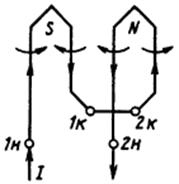
86. Представлена схема з'єднання секцій обмотки статора для зміни числа пар полюсів АД
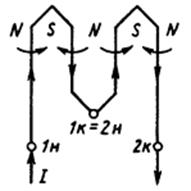
секції з'єднані паралельно та зустрічно р = 2
секції з'єднані паралельно р = 1
секції з'єднані послідовно та зустрічно р = 1
секції з'єднані послідовно та згідно р = 2
87. Представлена схема з'єднання секцій обмотки статора для зміни числа пар полюсів АД
секції з'єднані послідовно та зустрічно р = 1
секції з'єднані послідовно та згідно р = 2
секції з'єднані паралельно та зустрічно р = 2
секції з'єднані паралельно р = 1
88. Представлена схема з'єднання секцій обмотки статора для зміни числа пар полюсів АД
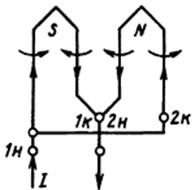
секції з'єднані паралельно р = 1
секції з'єднані паралельно та зустрічно р = 2
секції з'єднані послідовно та зустрічно р = 1
секції з'єднані послідовно та згідно р = 2
Модуль №3 «Автоматизація виробничих процесів. Замкнені схеми управління електроприводом»
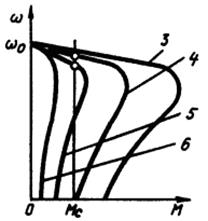
1. Визначити за яким принципом побудована дана замкнена структура електропривода:
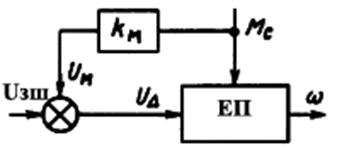
принцип відхилення
частотне регулювання
принцип зворотного зв'язку
компенсації зовнішніх збурювань
2. Визначити за яким принципом побудована дана замкнена структура електропривода:
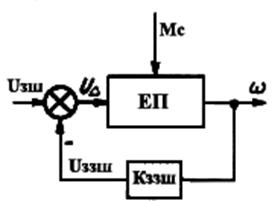
компенсації зовнішніх збурювань
частотне регулювання
принцип відхилення
програмно-керований електропривод
3. Зворотні зв'язки, які використовуються в замкненому електроприводі діляться на
жорсткий та гнучкі
лінійні та нелінійні
диференційні та інтегральні
позитивні та негативні
4. В замкненому електроприводі позитивним називається такий зворотний зв'язок
сигнал якого діє тільки в перехідних режимах електропривода
сигнал якого діє як в перехідному режимі, так і в режимі, що встановився
сигнал якого спрямований згідно із сигналом, що задається
спрямований зустрічно із сигналом, що задається
5. В замкненому електроприводі негативним називається такий зворотний зв'язок
сигнал якого спрямований згідно із сигналом, що задається
сигнал якого діє тільки в перехідних режимах електропривода
сигнал якого діє як в перехідному режимі, так і в режимі, що встановився
спрямований зустрічно із сигналом, що задається
6. В замкненому електроприводі жорстким називається такий зворотний зв'язок
сигнал якого діє тільки в перехідних режимах електропривода
спрямований зустрічно із сигналом, що задається
сигнал якого спрямований згідно із сигналом, що задається
сигнал якого діє як в перехідному режимі, так і в режимі, що встановився
7. В замкненому електроприводі гнучким називається такий зворотний зв'язок
сигнал якого діє тільки в перехідних режимах електропривода
сигнал якого діє як в перехідному режимі, так і в режимі, що встановився
сигнал якого спрямований згідно із сигналом, що задається
спрямований зустрічно із сигналом, що задається
8. Представлена схема замкненого електропривода із загальним підсилювачем забезпечує регулювання
двох координат – положення та ЕРС
двох координат – напруги та струму (моменту)
двох координат – швидкості та струму (моменту)
двох координат – ЕРС та магнітного потоку
9. Представлена схема замкненого електропривода реалізує регулювання координат яким способом?
сумуються всі сигнали пристроєм керування
підлеглим регулюванням координат
компенсація зовнішніх збурювань
незалежним регулюванням координат
10. Дайте визначення основній перевазі для схеми замкненого електропривода підлеглого регулювання координат
основна перевага такої схеми полягає у відсутності можливості регулювання кожної координати, а підпорядкованість контурів струму та швидкості не дозволяє спростити перехідні процеси
основна перевага такої схеми полягає в простоті реалізації, але недолік – вона має високі експлуатаційні витрати
основна перевага такої схеми полягає в можливості оптимального настроювання регулювання кожної координати, а підпорядкування контуру струму контуром швидкості дозволяє спростити процес обмеження струму та моменту
основна перевага такої схеми полягає в простоті реалізації, але вона не дозволяє регулювати координати електропривода незалежно один від одного
11. Визначте закон регулювання автоматичного регулятора по представленому диференційному рівнянню:
П
ПІ
ПД
І
12. Визначте закон регулювання автоматичного регулятора по представленому диференційному рівнянню:

П
І
ПД
ПІ
13. Визначте закон регулювання автоматичного регулятора по представленому диференційному рівнянню:
ПД
І
П
ПІ
14. Визначте закон регулювання автоматичного регулятора по представленому диференційному рівнянню:
ПД
П
І
ПІ
15. Визначте закон регулювання автоматичного регулятора по представленому диференційному рівнянню:

ПІД
ПІ
І
П
16. Визначте закон регулювання автоматичного регулятора по представленій передатній характеристиці:
ПІД
П
ПІ
І
17. Визначте закон регулювання автоматичного регулятора по представленій передатній характеристиці:
І
ПІ
П
ПІД
18. Визначте закон регулювання автоматичного регулятора по представленій передатній характеристиці:
І
П
ПІ
ПД
19. Визначте закон регулювання автоматичного регулятора по представленій передатній характеристиці:
ПІ
П
І
ПД
20. Визначте закон регулювання автоматичного регулятора по представленій передатній характеристиці:
П
ПД
ПІ
ПІД
21. Автоматичний регулятор з реалізацією якого закону забезпечуює високу якість стабілізації параметру незалежно від навантаження об'єкта:
І
ПІД
П
ПІ
22. Автоматичний регулятор з реалізацією якого закону може стійко працювати тільки на об'єктах, що мають значне самовирівнювання:
ПІД
І
П
ПІ
23. Автоматичний регулятор з реалізацією якого закону може стійко працювати практично в будь-яких технологічних системах, однак його недолік — залежність регульованої величини від навантаження об'єктів:
ПІД
ПІ
П
І
24. Пристрій, який сприймає різницю між поточним і заданим значеннями регульованої величини та перетворює її у вплив на регулювальний орган відповідно до закладеного закону регулювання, називають
об’єктом керування
регулювальним органом
виконавчим механізмом
автоматичним регулятором
25. У більшості випадків під автоматичним регулятором розуміють пристрій, що ухвалює сигнал від первинного перетворювача і формує керуючий сигнал, який передається на:
об’єкт керування
виконавчий механізм
автоматичний регулятор
регулювальний орган
26. Автоматичні регулятори класифікуються по наступних ознаках:
по виду диференційного рівняння
по виду регульованого параметру та по виду регулюючого впливу
по роду енергії та по конструктивному виконанню
за законом регулювання
27. Що визначає представлена формула

втрати потужності в ланцюзі обмоток статора
змінні втрати потужності у трифазному асинхронному двигуні
втрати потужності в ланцюзі обмоток ротора
постійні втрати потужності у трифазному асинхронному двигуні
28. Що визначає представлена формула
втрати потужності в ланцюзі обмоток ротора
повні втрати енергії при роботі двигуна з постійним навантаженням
втрати потужності в ланцюзі обмоток статора
повні втрати енергії при роботі двигуна із циклічно мінливим навантаженням
29. Що визначає представлена формула
повні втрати енергії при роботі двигуна із циклічно мінливим навантаженням
втрати потужності в ланцюзі обмоток статора
втрати потужності в ланцюзі обмоток ротора
повні втрати енергії при роботі двигуна з постійним навантаженням
30. У перехідних режимах струми, що протікають по обмотках двигуна, істотно перевищують номінальні значення:
що викликає підвищені втрати енергії, тобто додаткове нагрівання двигуна
майже не викликають втрати енергії, за причиною своєї короткочасності
невеликі втрати енергії не призводить до додаткового нагрівання двигуна
що викликає підвищені втрати енергії, тобто додаткове охолодження двигуна
31. Втрати енергії за час перехідного процесу визначаються:
32. Втрати енергії під час пуску двигунів вхолосту ( ) дорівнюють:
) дорівнюють:
33. Втрати енергії при динамічному гальмуванні двигунів ( ) дорівнюють:
) дорівнюють:
34. Втрати енергії при гальмуванні двигунів противімкненням ( ) дорівнюють:
) дорівнюють:
35. Втрати енергії при реверсі двигунів ( ) дорівнюють:
) дорівнюють:
36. Визначте основні способи зниження втрат електроенергії в перехідних процесах двигунів:
регулювання швидкості в перехідних процесах
збільшення моменту інерції електропривода
зменшення моменту інерції електропривода
регулювання швидкості холостого ходу в перехідних процесах
37. Як можна зменшити момент інерції привода:
застосовувати перетворювачі енергії
заміною одного двигуна двома, що мають половинну потужність замінюваного двигуна
застосуванням малоінерційних електродвигунів, що мають знижений момент інерції ротора
раціональним конструюванням механічної передачі
38. Найбільш ефективний спосіб зниження втрат під час перехідних режимів – це керовані перехідні процеси. Визначте залежність зменшення втрат енергії в роторі при пуску у декілька ступенів:


39. Коефіцієнт корисної дії електродвигуна являє собою
відношення повної механічної потужності на валу до потужності, споживаної з мережі
відношення реактивної потужності на валу до потужності, споживаної з мережі
відношення реактивної потужності на валу до активної потужності, споживаної з мережі
відношення активної потужності на валу до реактивної потужності, споживаної з мережі
40. Номінальне значення навантаження ((0, 6-0, 7) Р н) вибирається при ККД трохи нижчому, ніж максимальне значення. Чим це пояснюється:
багато установок працюють зі змінним навантаженням
реактивна потужність забезпечує створення електромагнітних полів двигуна, а безпосередньо корисної роботи не виконує
при розрахунку електродвигунів передбачається запас потужності
при збільшенні навантаження АД зростає і cos, досягаючи свого максимального значення в області номінального навантаження
41. Визначте вірні затвердження:
коефіцієнт потужності  електропривода характеризує його як споживача електроенергії
електропривода характеризує його як споживача електроенергії
асинхронні двигуни є основними споживачами реактивної потужності в системі електропостачання
малопотужні електродвигуни звичайно мають кращі енергетичні характеристики, ніж потужні
потужні електродвигуни звичайно мають кращі енергетичні характеристики, ніж малопотужні
42. Електропривод змінного струму споживає з мережі
кут φ
cosφ
активну Р потужність
реактивну Q потужність
43. Активна потужність витрачається електроприводом
на створення електромагнітних полів двигуна
на зсув фаз між напругою мережі й струмом електропривода
на зниження споживання АД реактивної потужності
на здійснення корисної роботи
44. Реактивна потужність витрачається електроприводом
на зсув фаз між напругою мережі й струмом електропривода
на зниження споживання АД реактивної потужності
на здійснення корисної роботи
на створення електромагнітних полів двигуна
45. Коефіцієнт потужності cosφ електропривода характеризує його як споживача електроенергії і визначається:


46. Коефіцієнт потужності cosφ електропривода характеризує його як споживача електроенергії, а кут φ визначає
зсув фаз у трьохфазній мережі напруги
здійснення корисної роботи
зсув фаз між напругою мережі й струмом електропривода
зниження споживання АД активної потужності
47. Для більшості АД  . Для цих значень на кожен кіловат активної потужності АД споживає з мережі:
. Для цих значень на кожен кіловат активної потужності АД споживає з мережі:
0, 95 квар реактивної потужності
0, 95 кВт реактивної потужності
0, 5...0, 75 квар реактивної потужності
0, 5...0, 75 кВт реактивної потужності
48. Що необхідно виконати для зниження споживання АД реактивної потужності і тим самим підвищити коефіцієнт потужності
замінити недовантажені АД двигуном меншої потужності або понизити напругу в АД, що працює з малим завантаженням
обмежити холостий хід АД
використати компенсуючи пристрої
застосувати СД замість АД
49. Визначте, який саме датчик рівня представлений на малюнку -
електродний датчиків рівня
електроконтактний манометр
диффиренційний манометр
поплавковий датчик рівня
50. Контроль за рівнем води у водонапірному баку може здійснюватись за допомогою
поплавкових датчиків рівня
електродних датчиків рівня
електроконтактних манометрів
індуктивних датчиків
51. Представлена електрична схема автоматизації заглибного насоса за рівнем води у водонапірній вежі. Визначте, який саме датчик захищає насос від сухого ходу -
датчика сухого ходу SL2
датчика сухого ходу SL1
датчика сухого ходу HL3
датчика сухого ходу SL3
52. Представлена електрична схема автоматизації заглибного насоса за рівнем води у водонапірній вежі. Визначте, які саме датчики рівня слідкують за нижнім та верхнім рівнем води -
датчики рівня HL1 та HL2
датчики рівня HL3 та HL4
датчики рівня SL2 та SL3
датчики рівня SL1 та SL2
53. Представлена електрична схема автоматизації заглибного насоса за рівнем води у водонапірній вежі. Визначте, за що відповідає елемент схеми SА1 -

SА1 слідкує за нижнім та верхнім рівнем води
датчик сухого ходу SА1
SА1 вмикає сигнальні лампочки
режим роботи схеми задається перемикачем SА1
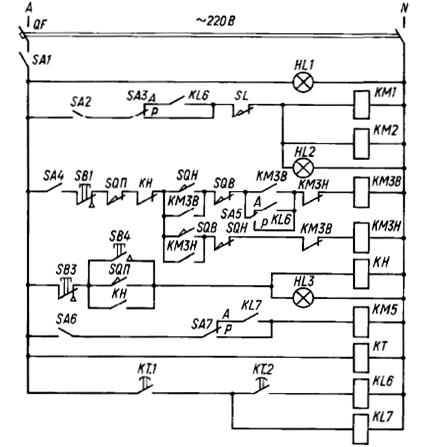
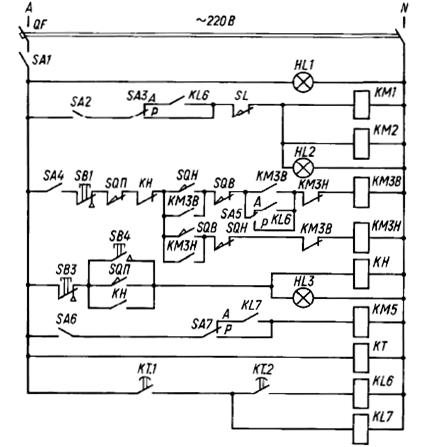
54. Представлена електрична схема автоматизації заглибного насоса за тиском водяного стовпа водонапірної вежі. Визначте, який саме датчик захищає насос від сухого ходу
датчик сухого ходу KM
датчика сухого ходу HL3
датчика сухого ходу SL
датчика сухого ходу KV2
55. Представлена електрична схема автоматизації заглибного насоса за тиском водяного стовпа водонапірної вежі. Визначте, який саме датчик слідкує за нижнім та верхнім рівнем води -
KV2
SL
HL3
SP
56. Представлена електрична схема автоматизації заглибного насоса за тиском водяного стовпа водонапірної вежі. Визначте, яку саме функцію відпрацьовує реле часу КТ -
захищає від ложного спрацювання електроконтактного манометра
подає напругу на схему керування
дистанційно керує електродвигуном
захищає від сухого ходу
57. Схема пуску електродвигунів у потоковій лінії може бути:
одночасний пуск
музичний пуск
лавинний пуск
пуск з витримкою часу
58. Представлена схема керування електроприводом кормороздавача РКА-2000. Щоб здійснити ручне керування, які дії необхідно здійснити:
встановити перемикачі SA3, SA5, SA 7 у положення " Ручне"
встановити перемикачі SA3, SA5, SA 7 у положення " Автоматичне"
встановити перемикач SA1 і подати напругу на схему керування
ввімкнути автомат QF
59. Представлена схема керування електроприводом кормороздавача РКА-2000. Який саме елемент системи контролює живлення двигунів M1 та M2:
автомат QF
перемикач SA5
датчика рівня SL
сигнальна лампочка HL1
60. Представлена схема керування електроприводом кормороздавача РКА-2000. Який із двигунів потокової системи реверсивний?
двигун M5
двигун M3
двигун M2
двигун M1
61. Представлена схема керування електроприводом талі. За допомогою яких елементів системи керують електродвигунами талі?
автоматичних вимикачів
рубильників
кінцевих вимикачів
реверсивних магнітних пускачів і пускових кнопок
62. Представлена схема керування електродвигуном талі. За допомогою яких елементів системи обмежується рух підйомного пристрою?
рубильників
кінцевих вимикачів
реверсивних магнітних пускачів і пускових кнопок
автоматичних вимикачів
63. Автоматизація виробничих процесів на промислових підприємствах тісно пов'язана з телемеханізацією та диспетчеризацією. Диспетчеризація являє собою
пристрій, який сприймає різницю між поточним і заданим значеннями регульованої величини та перетворює її у вплив на регулювальний орган відповідно до закладеного в регулятор закону регулювання
пристрій, що характеризується залежністю між вихідний і вхідний величинами в усталеному та перехідному режимах
систему централізованого керування
є одним з основних технічних засобів диспетчеризації
64. Автоматизація виробничих процесів на промислових підприємствах тісно пов'язана з телемеханізацією та диспетчеризацією. Телемеханізація –
систему централізованого керування
пристрій, що характеризується залежністю між вихідний і вхідний величинами в усталеному та перехідному режимах
пристрій, який сприймає різницю між поточним і заданим значеннями регульованої величини та перетворює її у вплив на регулювальний орган відповідно до закладеного в регулятор закону регулювання
є одним з основних технічних засобів диспетчеризації
65. У якості каналів зв'язку при телемеханізації звичайно використовують
стандартні кабельні канали, що пропускають спектр частот від 30 до 340 Гц
стандартні телефонні канали, що пропускають спектр частот від 300 до 3400 Гц
стандартні радіочастотні канали, що пропускають спектр частот від 300 до 400 Гц
стандартні повітряні канали, що пропускають спектр частот від 30 до 400 Гц
66. Необхідною умовою використання ТМС на промисловому підприємстві є
оснащення виробничого процесу засобами автоматизації, пристроями захисту, контрольно-вимірювальними приладами та автоматичними виконавчими пристроями
оснащення виробничого процесу пристроями захисту
оснащення виробничого процесу санітарно-гігієнічними засобами
оснащення виробничого процесу засобами телемеханізації та диспетчеризації
67. Залежно від відстані між керованим об'єктом і пунктом керування може застосовуватися місцеве, дистанційне або телемеханічне керування. Місцеве керування застосовується
з економічних міркувань доцільно застосовувати при відстані не більше декількох десятків метрів
з економічних міркувань доцільно застосовувати при відстані не більше декількох сотень кілометрів
здійснює передачу команд на багато десятків і сотні кілометрів
якщо по проводах передається не вся потужність, споживана керованим об'єктом, а тільки частина її, достатня для спрацьовування проміжного органа
68. Залежно від відстані між керованим об'єктом і пунктом керування може застосовуватися місцеве, дистанційне або телемеханічне керування. Дистанційне керування застосовується
з економічних міркувань доцільно застосовувати при відстані не більше декількох сотень кілометрів
здійснює передачу команд на багато десятків і сотні кілометрів
якщо по проводах передається не вся потужність, споживана керованим об'єктом, а тільки частина її, достатня для спрацьовування проміжного органа
з економічних міркувань доцільно застосовувати при відстані не більше декількох десятків метрів
69. Залежно від відстані між керованим об'єктом і пунктом керування може застосовуватися місцеве, дистанційне або телемеханічне керування. Телемеханічне керування застосовується
якщо по проводах передається не вся потужність, споживана керованим об'єктом, а тільки частина її, достатня для спрацьовування проміжного органа
з економічних міркувань доцільно застосовувати при відстані не більше декількох десятків метрів
з економічних міркувань доцільно застосовувати при відстані не більше декількох сотень кілометрів
здійснює передачу команд на багато десятків і сотні кілометрів
70. Визначте вірні твердження
при дистанційному керуванні для передачі кожної команди керування необхідна окрема лінія зв'язку
у телемеханіці прийнятий двоступінчастий процес керування: спочатку диспетчер вибирає об'єкт (знаходить його адресу), а потім посилає команду («включити» або «виключити»)
при телемеханічному керуванні одну лінію зв'язку застосовують для керування багатьма об'єктами шляхом посилки по ній спеціальних (кодованих) сигналів
наявність ланцюга керування є головною ознакою дистанційного керування, що відрізняє його від місцевого
71. Передача сигналів у телемеханічних системах відбувається по каналах зв'язку. Лінія зв'язку —
це фізичне середовище, по якому передають сигнали
це сукупність технічних засобів, що забезпечують передачу повідомлень по лінії зв'язку від джерела до приймача
це система централізованого керування
це пристрій, що характеризується залежністю між вихідний і вхідний величинами в усталеному та перехідному режимах
72. Передача сигналів у телемеханічних системах відбувається по каналах зв'язку. Канал зв'язку —
це система централізованого керування
це фізичне середовище, по якому передають сигнали
це пристрій, що характеризується залежністю між вихідний і вхідний величинами в усталеному та перехідному режимах
це сукупність технічних засобів, що забезпечують передачу повідомлень по лінії зв'язку від джерела до приймача
4. Навчально-методична література
4.1. Основна і додаткова література (із наскрізною нумерацією)
4.1.1. Основна література
1. Жулай Є.Л., Зайцев Б.В., Лавріненко Ю.М., Марченко О.С., Войтнюк Д.Г. Електропривід сільськогосподарських машин, агрегатів та потокових ліній. – К.: Вища освіта, 2001. –288 с.
2. Практикум з електропривода / В.С. Олійник, О.С. Марченко, Е.Л. Жулай, Ю.М. Лавриненко. - К.: Урожай, 1999, 192 с.
3. Дайнеко В.А. Электрооборудование сельскохозяйственных предприятий - Минск: Новое знание, 2008.- 320 с.
4. Бородин И.Ф., Кирилин Н.И. Основы автоматики и автоматизации производственных процессов. – М.: Колос, 1972, –328 с.
5. Мартыненко Н.И. Автоматика и автоматизация производственных процессов. – М., Агропромиздат, 1985, 324 с.
6. М.Г. Чиликин, М.М. Соколов, В.М. Терехов, А.В. Шинянский Основы автоматизированного электропривода. Учеб. пособие для вузов. М., «Энергия», 1974. 508 с.
7. Электрооборудование и автоматизация сельскохозяйственных агрегатов и установок (И.Ф. Кудрявцев, Л.А. Калинин, В.А. Карасенко и др./Под ред. Кудрявцева И.Ф. - М.: Агропромиздат, 1988. - с. 480.
8. Москаленко В. В. Электрический привод. - М.: Издательский центр «Академия», 2004. - 368 с.
9. Фоменков А. П. Электропривод сельскохозяйственных машин, агрегатов и поточных линий. - М.: Колос, 1984. - 288 с.
10. Подобайло В. Г., Зініч В. П., Байгер М. А. Застосування електроенергії у сільському господарстві. - К.: Урожай, 1989. - 166 с.
11. Електрообладнання тваринницьких підприємств і автоматизація виробничих процесів у тваринництві / В. Ф. Гончар, Л. П. Тищенко -2-е вид. перероб. і доп. - К.: Вища школа, 1986, 287 с.
12. Фокин В. В. Практикум по электрооборудованию сельскохозяйственного производства. - М.: Агропромиздат, 1991, 160 с.
13. Автоматика и автоматизация производственных процессов / Н. Н. Мартиненко, Б. Л. Головенский, Р. Д. Проценко, Т. Ф. Резниченко. - М.: Агропромиздат, 1985, 335с.
4.1.2.Додаткова література
14. Марголин Ш. М. Дифференциальный электропривод. - М.: Энергия, 1975. -168 с.
15. Транзисторный электропривод на базе синхронных двигателей с возбуждением от постоянных магнитов для станков и промышленных роботов / А. Д. Поздеев, В. В. Горчаков, Н. В.Донской и др. //Электротехника. - 1988. -№2. -
16. Москаленко В. В. Электрический привод. - М.: Высш. шк., 1991. - 430 с.
17. Применение микропроцессорных систем в энергетике и радиоэлектронике / А. Н.Дорошенко, Ю. Н. Евланов, Л. А. Ильяшенко, и др.; Под ред. B. А. Мясникова, А. А. Дерюгина. - М.: Моск. энерг. ин-т, 1986. - 100 с.
18. Терехов В.М. Элементы автоматизированного электропривода. - М.: Энергоатомиздат, 1987. - 224 с.
Методичні вказівки до самостійної роботи з дисципліни
«Електропривод і автоматизація»,
для студентів денної форми навчання факультету механізації сільського господарства, бакалаврів за напрямом підготовки 6.100102 «Процеси, машини та обладнання агропромислового виробництва» кваліфікації 6.100102 «Технічний фахівець-механік».
Ухвалено науково-методичною радою факультету механізації сільського господарства.
|
|