Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
В частотно-регульованих електроприводах використовують. двигуни постійного струму з незалежним збудженням
|
|
двигуни постійного струму з незалежним збудженням
АД загального призначення
спеціальні багатошвидкістні двигуни
двигуни постійного струму з паралельним збудженням
56. При проектуванні частотно-регульованих двигунів не обов’язково дотримуватись заданих значень пускового і мінімального моментів, пускового струму. Тому частотно-регульовані двигуни проектують без урахування
додаткового опору в ланцюзі статора
додаткового опору в ланцюзі ротора
пускових характеристик, які забезпечуються системою керування
коефіцієнта корисної дії
57. Для сільськогосподарських машин і агрегатів розроблені частотно-регульовані двигуни з межами регулювання
частоти 5-60 Гц, а напруги 30 - 380 В
частоти 50-60 Гц, а напруги 380 - 6000 В
частоти 150-600 Гц, а напруги 30 - 380 В
частоти 50-60 Гц, а напруги 30 - 380 В
58. Зміна частоти струму живлення дає можливість змінювати швидкість обертання двигуна в зоні малих ковзань, а значить
і малих втратах енергії колі статора, що характеризується досить низьким коефіцієнтом корисної дії
і малих втратах енергії в роторному колі, що характеризується досить високим коефіцієнтом корисної дії
і великих втратах енергії колі статора, що характеризується досить низьким коефіцієнтом корисної дії
і великих втратах енергії в роторному колі, що характеризується досить низьким коефіцієнтом корисної дії
59. При регулюванні частоти струму в приводах з різними механічними характеристиками робочої машини напругу на виході перетворювача частоти змінюють виходячи з умови
збереження напруги на статорі АД
збереження перевантажувальної здатності двигуна: 
збереження параметрів електропривода
збереження значення номінальної частоти живлячої мережі
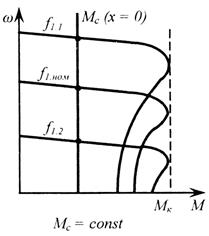
60. При частотному регулюванні асинхронних двигунів для робочої машини, що має показник степеня х = 0, закон зміни напруги характеризується виразом:


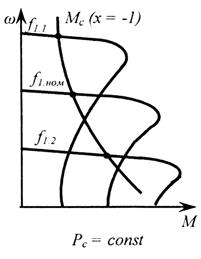
61. При частотному регулюванні асинхронних двигунів для робочої машини, що має показник степеня х = -1, закон зміни напруги характеризується виразом:
62. При частотному регулюванні асинхронних двигунів для робочої машини, що має показник степеня х = 2, закон зміни напруги характеризується виразом:
63. Яким законом зміни напруги при частотному регулюванні отримали дані механічні характеристики двигуна:
64. Яким законом зміни напруги при частотному регулюванні отримали дані механічні характеристики двигуна:
65. Яким законом зміни напруги при частотному регулюванні отримали дані механічні характеристики двигуна:

66. До якого способу регулювання відносяться дані механічні характеристики, якщо їх отримали при різних значеннях шпаруватості:
імпульсне регулювання координат електропривода з асинхронним двигуном опором R1д у ланцюзі статора
зміна напруги живлення на статорі асинхронного двигуна
імпульсне регулювання координат електропривода з асинхронним двигуном опором R2д у ланцюзі ротора
зміна числа пар полюсів
67. Який спосіб регулювання координат електропривода з асинхронним двигуном реалізують данні схеми:
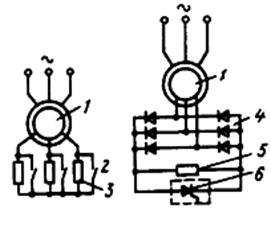
імпульсне регулювання координат електропривода з асинхронним двигуном опором R2д у ланцюзі ротора
зміна напруги, яка подається на ротор асинхронного двигуна
зміна напруги живлення на статорі асинхронного двигуна
імпульсне регулювання координат електропривода з асинхронним двигуном опором R1д у ланцюзі статора
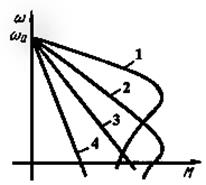
68. При імпульсному регулюванні координат електропривода з асинхронним двигуном опором R2ду ланцюзі ротора при різних значеннях шпаруватості одержали сімейство штучних механічних характеристик. Характеристика побудована для граничного режиму роботи керованого ключа відповідно при  =1:
=1:
при  = 1 (ключ постійно розімкнутий або тиристор постійно закритий) резистор повністю введений у ланцюг ротора й АД працює по штучній характеристиці 3
= 1 (ключ постійно розімкнутий або тиристор постійно закритий) резистор повністю введений у ланцюг ротора й АД працює по штучній характеристиці 3
при = 1 (ключ постійно замкнутий або тиристор постійно відкритий) резистор закорочен і АД працює по природній механічній характеристиці 2
при = 1 (ключ постійно розімкнутий або тиристор постійно закритий) резистор повністю введений у ланцюг ротора й АД працює по штучній характеристиці 4
при = 1 (ключ постійно замкнутий або тиристор постійно відкритий) резистор закорочен і АД працює по природній механічній характеристиці 1
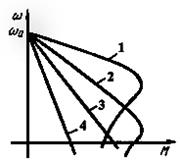
69. При імпульсному регулюванні координат електропривода з асинхронним двигуном опором R2ду ланцюзі ротора при різних значеннях шпаруватості одержали сімейство штучних механічних характеристик. Характеристика побудована для граничного режиму роботи керованого ключа відповідно при =0:
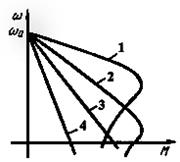
при = 0 (ключ постійно замкнутий або тиристор постійно відкритий) резистор закорочен і АД працює по природній механічній характеристиці 1
при = 0 (ключ постійно замкнутий або тиристор постійно відкритий) резистор закорочен і АД працює по природній механічній характеристиці 2
при = 0 (ключ постійно розімкнутий або тиристор постійно закритий) резистор повністю введений у ланцюг ротора й АД працює по штучній характеристиці 3
при = 0 (ключ постійно розімкнутий або тиристор постійно закритий) резистор повністю введений у ланцюг ротора й АД працює по штучній характеристиці 4
70. При імпульсному регулюванні координат електропривода з асинхронним двигуном при різних значеннях шпаруватості 0 <  < 1 еквівалентний опір резистора в ланцюзі ротора змінюється відповідно
< 1 еквівалентний опір резистора в ланцюзі ротора змінюється відповідно
до формули 
до формули 
до формули 
до формули 
|
|