Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
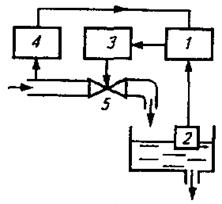
Визначте структурну схему ручного керування
|
|
66. Залежно від ступеня автоматичного керування розрізняють:
замкнену та розімкнену
аналогову та дискретну
ручне, автоматизоване та автоматичне керування
стабілізуючу, програмну та адаптивну
67. Потенціометричні датчики мають відносну точність, стабільність характеристик та вони зазвичай не потребують підсилювачів і тому знайшли широке використання у автоматиці. Наявність рухомих частин та ковзаючого контакту у потенціометричних датчиків
підвищує надійність їх роботи
не впливає на їх роботу
знижує надійність їх роботи
збільшує термін служби
68. У індуктивних датчиках з рухомим якорем, якщо знехтувати магнітним опором сталевого осердя та активним опором котушки, то можна вважати, що струм, протікаючий в обмотках, пропорційний значенню
магнітному полю
повітряного зазору
активному опору котушки
магнітного опору сталевого осердя
69. Більш досконалими вимірювальними схемами з тензодатчиками, які працюють на постійному та змінному струмі, є
послідовно з’єднані
мостові
комбіновані
паралельно з’єднані
70. Фоторезистор –
напівпровідниковий приймач променистої енергії, у якому відбувається направлений рух носіїв струму під дією енергії оптичного випромінювання
напівпровідниковий приймач променистої енергії, що має направлений рух носіїв зарядів та властивості підсилення фотоструму під дією енергії оптичного випромінювання
вакуумна або наповнена газом лампа з катодом з світлочуттєвого матеріалу, нанесеного на жорстку основу, та анодом у вигляді кільця або пластини
напівпровідниковий прилад, у якому під дією світла зростає кількість вільних електронів, а значить, і електропровідність
71. Вакуумний фотоелемент – це
напівпровідниковий приймач променистої енергії, що має направлений рух носіїв зарядів та властивості підсилення фотоструму під дією енергії оптичного випромінювання
напівпровідниковий приймач променистої енергії, у якому відбувається направлений рух носіїв струму під дією енергії оптичного випромінювання
напівпровідниковий прилад, у якому під дією світла зростає кількість вільних електронів, а значить, і електропровідність
вакуумна або наповнена газом лампа з катодом з світлочуттєвого матеріалу, нанесеного на жорстку основу, та анодом у вигляді кільця або пластини
72. Фотодіод – це
напівпровідниковий приймач променистої енергії, що має направлений рух носіїв зарядів та властивості підсилення фотоструму під дією енергії оптичного випромінювання
напівпровідниковий прилад, у якому під дією світла зростає кількість вільних електронів, а значить, і електропровідність
напівпровідниковий приймач променистої енергії, у якому відбувається направлений рух носіїв струму під дією енергії оптичного випромінювання
вакуумна або наповнена газом лампа з катодом з світлочуттєвого матеріалу, нанесеного на жорстку основу, та анодом у вигляді кільця або пластини
73. Фототранзистор – це
напівпровідниковий приймач променистої енергії, у якому відбувається направлений рух носіїв струму під дією енергії оптичного випромінювання
напівпровідниковий прилад, у якому під дією світла зростає кількість вільних електронів, а значить, і електропровідність
напівпровідниковий приймач променистої енергії, що має направлений рух носіїв зарядів та властивості підсилення фотоструму під дією енергії оптичного випромінювання
вакуумна або наповнена газом лампа з катодом з світлочуттєвого матеріалу, нанесеного на жорстку основу, та анодом у вигляді кільця або пластини
74. Світловою характеристикою напівпровідникових фотоелементів називають залежність
фотоструму від напруги при незмінному світловому потоці
фотоструму від частоти при незмінній прикладеній напрузі
фотоструму від світлового потоку при незмінній прикладеній напрузі
частоти струму від напруги
75. Вольт-амперною характеристикою напівпровідникових фотоелементів називають залежність
частоти струму від напруги
фотоструму від напруги при незмінному світловому потоці
фотоструму від світлового потоку при незмінній прикладеній напрузі
фотоструму від частоти при незмінній прикладеній напрузі
76. Які фізичні величини вимірюють та перетворюють на електричний сигнал потенціометричні датчики:
криволінійне переміщення
кутове переміщення
силу тиска
лінійне переміщення
77. Які фізичні величини вимірюють та перетворюють на електричний сигнал індуктивні датчики:
криволінійне переміщення
лінійне переміщення
силу тиска
кутове переміщення
78. Які фізичні величини вимірюють та перетворюють на електричний сигнал тензометричні датчики:
лінійне переміщення
вага
деформація об’єкта дослідження
настрій об’єкта дослідження
79. Зона чутливості дротяного потенціометричного датчика визначається:
довжиною дроту
тремтінням руки оператора вимірювання
діаметром дроту
повітряним зазором
80. Принципи дії індуктивних датчиків базуються на:
перетворенні за рахунок зміни свого електричного опору первинного перетворювача в змінну або постійну напругу
зміні взаємоіндуктивності котушки з магнітопроводом при переміщенні якоря
властивості деяких провідникових та напівпровідникових матеріалів змінювати активний опір при деформації
зміні індуктивності при переміщенні якоря
81. Визначте вхідний сигнал для індуктивного датчика з рухомим якорем, якщо вихідним є напруга:
тиск
напруга
переміщення якоря
струм
82. Індуктивні датчики з рухомим якорем забезпечують вимірювання механічних лінійних переміщень в межах:
від декількох метрів до декількох мікрометрів
від декількох мікрометрів до декількох міліметрів
від декількох метрів до декількох кілометрів
від декількох кілометрів до декількох міліметрів
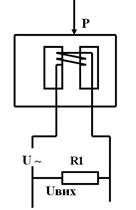
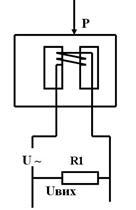
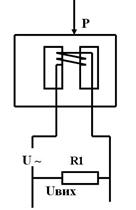
83. Визначте тип індуктивного датчика, який використовуюється для вимірювання великих переміщень
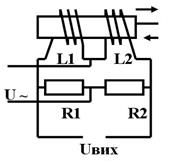
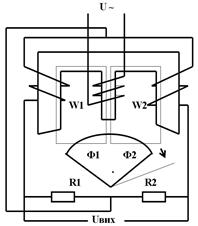
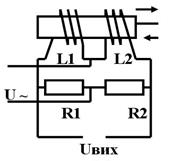
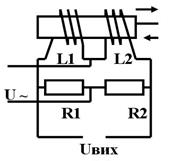
84. Визначте тип індуктивного датчика, який використовуюється для вимірювання кутових переміщень
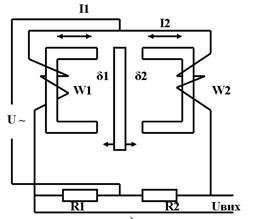
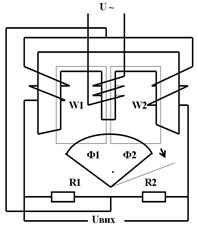
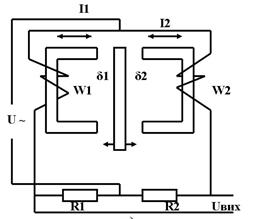
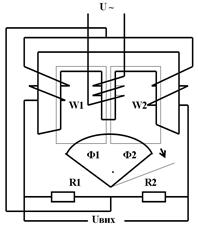
85. Визначте тип індуктивного датчика, який використовуюється для визначення сили тиску

86. Принципи дії тензорезисторних датчиків базуються на:
перетворенні за рахунок зміни свого електричного опору первинного перетворювача в змінну або постійну напругу
зміні взаємоіндуктивності котушки з магнітопроводом при переміщенні якоря
зміні індуктивності при переміщенні якоря
властивості деяких провідникових та напівпровідникових матеріалів змінювати активний опір при деформації
87. Сигнал на виході вимірювальних схем з тензодатчиками невисокої потужності, тому для його підсилення застосовують:
автоматичну систему регулювання вихідної величини замкненого типу
автоматичну систему регулювання вихідної величини розімкненого типу
підсилювач постійного струму
підсилювач змінного струму
88. Більш досконалими є мостові вимірювальні схеми з тензодатчиками, тому використання двох або чотирьох активних тензорезисторів збільшує чутливість тензометричного датчика. Також при цьому відбувається
пряма компенсація негативного впливу на точність вимірювання коливань повітря
пряма компенсація негативного впливу на точність вимірювання коливань вологості та запилення
пряма компенсація негативного впливу на точність вимірювання коливань радіохвиль
пряма компенсація негативного впливу на точність вимірювання коливань температури та напруги живлення
Модуль №2 «Технічне обладнання АСУ. Регулювання кутової швидкості електродвигунів»
1. Визначити представлені залежності:
навантажувальна діаграма та криві нагрівання і охолодження електродвигуна
механічна характеристика трифазного асинхронного двигуна в двигунному і генераторному режимах
електромеханічна характеристика трифазного асинхронного двигуна
механічна характеристика двигуна постійного струму в двигунному і генераторному режимах
2. Який спосіб гальмування здійснюється механічним гальмом керованим тяговим або гальмівним електромагнітом:
гальмування противмиканням
механічне гальмування з електричним керуванням
динамічне гальмування
статичне гальмування
3. Для гальмування противмиканням АД необхідно:
під час обертання ротора двигуна змінити послідовність фаз живлення на його статорі
відключити двигун від мережі змінного струму і подати на статор понижену постійну напругу
при вимиканні електродвигуна з мережі якір електромагніта відштовхується пружинами і вал двигуна загальмовується механічним гальмом
подати напругу на електродвигун, гальмівний електромагніт також отримує живлення і, притягуючи свій якір, розгальмовує вал електродвигуна
4. Для динамічного гальмування АД необхідно:
подати напругу на електродвигун, гальмівний електромагніт також отримує живлення і, притягуючи свій якір, розгальмовує вал електродвигуна
відключити двигун від мережі змінного струму і подати на статор понижену постійну напругу
при вимиканні електродвигуна з мережі якір електромагніта відштовхується пружинами і вал двигуна загальмовується механічним гальмом
під час обертання ротора двигуна змінити послідовність фаз живлення на його статорі
5. Механічне гальмування з електричним керуванням досить ефективний спосіб і застосовується:
для двигунів малої і середньої потужності. Вибіг ротора виходить надвеликим
для двигунів малої і середньої потужності. Вибіг ротора виходить мінімальним
для двигунів великої і надвеликої потужності. Вибіг ротора виходить мінімальним
для двигунів великої і середньої потужності. Вибіг ротора виходить надвеликим
6. При гальмуванні противмиканням змінюється напрям обертання магнітного поля статора і воно загальмовуватиме ротор. При близькій до нуля швидкості ротора статор необхідно вимкнути з мережі, інакше ротор почне обертатись у зворотному напрямку. Вимикати двигун із мережі краще автоматично за допомогою:
автоматично за допомогою автоматичного вимикача
вручну
автоматично за допомогою реле контролю швидкості
автоматично за допомогою рубильника
|
|