Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Ориентирование РЛС в ночное время.
|
|
ПРЕДИСЛОВИЕ
Радиотехнические войска (РТВ) как род войск Военно-Воздушных Сил (ВВС) выполняют ответственные задачи по ведению радиолокационной разведки средств воздушного нападения (СВН) противника и выдачи радиолокационной информации, необходимой для решения задач управления войсками и радиолокационного обеспечения боевых действий зенитных ракетных войск (ЗРВ) и авиации. Для выполнения этих задач РТВ оснащаются средствами радиолокации, позволяющими в любое время года и суток, независимо от метеорологических условий и помех, решать задачи радиолокационного наблюдения СВН противника.
Для эффективного использования радиолокационных станций (РЛС) необходимо, чтобы инженерный состав РТВ имел высокий уровень оперативно-тактической и специальной технической подготовки.
В этой связи инженерному составу РТВ требуются глубокие технические знания конкретного образца РЛС, соответствующие умения и навыки с целью его эффективного боевого применения, грамотной технической эксплуатации и ремонта.
Дисциплина «Боевое применение подразделений РТВ ВВС» относится к группе тактико-специальных дисциплин в системе подготовки офицеров запаса по военно-учетной специальности «Эксплуатация и ремонт радиолокационных комплексов ПВО ВВС» и занимает одно из ведущих мест в учебной программе.
Данная дисциплина является профилирующей и обеспечивает формирование у выпускника необходимого объема знаний и умений выполнять функциональные обязанности по должности предназначения, способного оценивать воздушную обстановку, прогнозировать её изменение, знать порядок ведения боевой работы в составе боевых расчетов подразделения РТВ в различных условиях обстановки. Освоение данной дисциплины базируется на знаниях, полученных при изучении дисциплин: «Тактика РТВ ВВС», «Военно-техническая подготовка».
Данное пособие разработано на основе учебной программы подготовки офицеров запаса на военной кафедре Института военного обучения по военно-учетной специальности «Эксплуатация и ремонт радиолокационных комплексов ПВО ВВС», вошедшей в сборник учебных программ военно-профессиональных учебных дисциплин ФГАОУ ВПО «Сибирский федеральный университет», утвержденный Главнокомандующим ВВС 22.01.2009 г.
В первой главе учебного пособия рассмотрены назначение, состав РЛС и боевые возможности: форма и размеры зоны обнаружения; информационная способность и качество радиолокационной информации; помехозащищенность; мобильность и живучесть.
Во второй главе изложены особенности применения в РЛС П-18 метрового диапазона волн. Дан анализ факторов, влияющих на выбор позиции; показан практический порядок действий лиц боевого расчета при ориентировании РЛС и наземного радиолокационного запросчика (НРЗ).
В третьей главе приведены обязанности лиц боевого расчета, организация боевой работы и практического выполнения работ при включении и контроле функционирования РЛС. В зависимости от поставленной задачи, воздушной обстановки и наличия и интенсивности помех показаны порядок выбора режимов работы РЛС, особенности обнаружения и проводки целей.
В четвертой главе рассмотрены особенности боевой работы в условиях применения противорадиолокационных ракет (ПРЛР) и оружия массового поражения.
В пятой главе даны указания и приведены нормы по выполнению нормативов боевой работы.
В шестой главе приведен перечень операций и методика проведения технического обслуживания на РЛС.
В седьмой главе изложены указания по технике безопасности и правилам оказания первой доврачебной помощи.
Каждая глава снабжена вопросами для самоконтроля с целью повторения и закрепления учебного материала обучающимися.
В конце учебного пособия приведены шесть приложений. В первом приложении дан состав аппаратуры поблочно. Во втором приведены линейно-временные графики и перечень операций, проводимых при развертывании РЛС, а в третьем – при свертывании. В четвертом приложении показаны исходные положения органов управления РЛС поблочно, в пятом и шестом приведены линейно-временные графики контрольного осмотра (КО) и ежедневного технического обслуживания (ЕТО) соответственно.
Подготовка и издание настоящего учебного пособия обусловлены необходимостью показать современное состояние порядка ведения боевой работы на РЛС. В предыдущих изданиях по данной тематике содержатся в основном устаревшие сведения, основанные на отмененных документах, регламентирующих порядок ведения боевой работы. Кроме того, в данном издании, помимо собственно алгоритмов ведения боевой работы, также приведены расширенные сведения о боевых возможностях РЛС П-18, методика проведения всех видов технического обслуживания, нормативы боевой работы и меры по соблюдению правил техники безопасности. Другими словами, в учебном пособии авторами была сделана попытка охватить все аспекты такого этапа эксплуатации РЛС П-18, как использование по назначению.
Авторы выражают признательность и благодарность коллективу рецензентов кафедры (управления воинскими частями связи и РТО авиации) ВУНЦ ВВС «ВВА» г. Воронеж: начальнику кафедры, доктору технических наук, профессору полковнику П. А. Федюнину, заместителю начальнику кафедры, кандидату технических наук, доценту полковнику И.Д. Назмутдинову, профессору кафедры, кандидату технических наук, доценту подполковнику В. И. Воробьёву за высказанные замечания, позволившие улучшить качество содержания учебника.
Учебное пособие предназначено для студентов (курсантов) учебных военных центров (факультетов военного обучения, военных кафедр), обучающихся по военно-учетной специальности «Эксплуатация и ремонт радиолокационных комплексов РТВ ВВС».
ГЛАВА 1
НАЗНАЧЕНИЕ, СОСТАВ
И БОЕВЫЕ ВОЗМОЖНОСТИ
РАДИОЛОКАЦИОННОЙ СТАНЦИИ П-18
РЛС П-18 (изделие 1РЛ131) является следующим логическим этапом в развитии целой серии РЛС метрового диапазона. В 1946 г. по заданию правительства Нижегородский радиозавод имени В.И. Ленина приступил к разработке подвижной РЛС метрового диапазона. Эта РЛС размещалась в двух фургонах на автомобильном шасси и обозначалась П-3А. Серийный выпуск РЛС П-3А был начат в 1948 г. Следующей разработкой в 1950 г. стала РЛС П-8 «Волга», у которой были значительно улучшены многие технические параметры и впервые применен круговой обзор воздушного пространства.
В 1953 г. появилась РЛС П-10 «Волга-А», в которой реализована система перестройки частоты. В 1957 г. был начат выпуск РЛС серии П-12 «Енисей» с когерентно-импульсной аппаратурой селекции движущихся целей (СДЦ). Всего было произведено множество модификаций РЛС П-12, основными из которых были П-12НА с аппаратурой, размещенной на двух автомобилях, и П-12НП с размещением аппаратуры в прицепах. На базе РЛС П-12НА, как наиболее совершенной из серии РЛС метрового диапазона волн, в 1967 г. началась разработка РЛС П-18 «Терек».
В РЛС П-18, в отличие от П-12НА, в 1, 5 раза увеличены дальность и высота обнаружения воздушных объектов (ВО), повышена точность определения их координат. Также в РЛС реализовано полуавтоматическое целеуказание, использована новая элементная база, значительно увеличена надежность.
РЛС П-18 – это мобильная РЛС обнаружения, целеуказания и опознавания. Может работать автономно или в сопряжении с другими РЛС, подвижными радиовысотомерами (ПРВ), комплексами средств автоматизации (КСА).
1.1. Назначение и состав радиолокационной станции П-18
РЛС П-18 предназначена для обнаружения воздушных объектов, определения их плоскостных координат (азимута и дальности), государственной принадлежности и выдачи радиолокационной информации (РЛИ) на автоматизированные и неавтоматизированные командные пункты (КП) или пункты управления (ПУ) радиотехнических подразделений, обеспечения радиолокационной информацией (РЛИ) систем управления авиации, ЗРВ и войск радиоэлектронной борьбы (РЭБ).
Станция обеспечивает:
- обнаружение ВО;
- измерение двух координат ВО (азимута и дальности);
- определение государственной принадлежности ВО;
- выдачу РЛИ на автоматизированные и неавтоматизированные КП (ПУ) РТВ.
РЛС является подвижным радиотехническим средством дежурного режима средних и больших высот, метрового диапазона волн.
Станция состоит на вооружении радиолокационных рот и радиотехнических батальонов.
Съем РЛИ осуществляется глазомерным способом или, при сопряжении с КСА, – полуавтоматическим. Информация о целях передается на командные пункты РТВ и обеспечиваемые КП частей ЗРВ, ИА и РЭБ по проводным (радио-) каналам связи.
Станция сопрягается:
- с РЛС: П-37 (1РЛ139), П-19 (1РЛ134), 5Н84А(П), 5Н87, 64Ж6 и т. д. При этом по вращению антенны она может быть как ведомой, так и ведущей. Расстояние до сопрягаемых РЛС ограничивается длиной кабелей и составляет 300 м. Отображение информации от одной из сопрягаемых станций на экранах индикатора кругового обзора (ИКО) и выносного индикатора кругового обзора (ВИКО) РЛС П-18 может осуществляться как совместно с этой станцией (режим «В+Л» – внешняя + личная), так и только от сопряженной РЛС (режим «В»).
- с ПРВ: ПРВ-11 (1РЛ119), ПРВ-13 (1РЛ130), ПРВ-9 (1РЛ19), ПРВ-16 (1РЛ132);
Выдача РЛИ РЛС при сопряжении с современными КСА РТВ осуществляется:
В автоматизированной системе «Пирамида» – с КСА 86Ж6 «Поле» (КСА пункта управления радиолокационной роты) и КСА 5K60 «Основа» (КСА командного пункта радиотехнического батальона);
В унифицированном ряде комплекса средств автоматизации «Фундамент» – с элементами этой системы автоматизации: пункта управления радиолокационной роты (97Ш6) и командного пункта радиотехнического батальона (98Ш6) через модуль съёма 46С6.
Кроме того, информация о локационных воздушных объектах может быть снята и выдана в АСУ через автоматизированный комплекс съема информации командных пунктов – выносной индикаторный пост ВИП-117(М) или его более новые модификации.
При сопряжении РЛС с КСА выдача РЛИ осуществляется в аналоговой форме на расстояние до 300 м.
При сопряжении с высотомерами РЛС П-18 образует комплекс целеуказания, обеспечивающий определение трех координат ВО с высокой точностью.
В состав РЛС входят пять транспортных единиц: машина антенно-мачтового устройства (АМУ); аппаратная машина; силовые прицепы ПC-1 и ПС-2; изделие 1Л22 (НРЗ-4П).

Рис. 1.1. Общий вид радиолокационной станции П-18
Машина АМУ – автомобиль «Урал-4320» (Урал-375А) с АМУ, лебедками для монтирования АМУ. Масса автомобиля 12 936 кг.
Аппаратная машина – автомобиль «Урал-4320» (Урал-375А) с кузовом К-375, в котором размещена передающая, приемная, контрольно-измерительная аппаратура, аппаратура защиты от помех, аппаратура сопряжения и телефонной связи, ИКО и ВИКО, аппаратура дистанционного управления (ДУ) изделием 1Л22. Масса автомобиля 12 430 кг.
Два силовых прицепа (ПС-1, ПС-2) типа 700Г, в каждом из которых установлено по одному агрегату питания АД-10-Т/230-М, комплекты силового и сигнального кабеля. Масса прицепов 6 545 и 6 631 кг соответственно.
Машина изделия 1Л22 – автомобиль «Урал-4320З» (Урал-375А) со специальным кузовом-фургоном КЦ-375 (КЦ-4320), в котором размещен НРЗ: антенно-фидерное устройство, приёмно-передающая аппаратура, шифрирующе-дешифрирующее устройство (ШДУ), контрольно-измерительная аппаратура, аппаратура сопряжения с РЛС. Масса автомобиля 12 850 кг.
1.2. Боевые возможности радиолокационной станции П-18
Боевые возможности РЛС характеризуются совокупностью пространственных, информационных, точностных и временных показателей.
Пространственные показатели определяют размеры области воздушного пространства, в пределах которой обеспечивается обнаружение ВО с вероятностью, не ниже заданной.
Информационные показатели характеризуют возможности РЛС по количеству одновременно сопровождаемых ВО с установленным качеством РЛИ.
Точностные показатели определяются среднеквадратической ошибкой (СКО) определения координат ВО и разрешающей способностью РЛС.
Временные показатели характеризуют возможности РЛС по совершению маневра установленным составом сил и средств, временем развертывания (свертывания), включения (выключения). Кроме того, временные показатели характеризуют надёжность РЛС: среднее время наработки на отказ, среднее время восстановления, запас ресурса до капитального ремонта.
1.2.1. Форма и размеры зоны обнаружения
Зоной обнаружения (ЗО) называется область воздушного пространства, в границах которой обеспечивается обнаружение ВО с заданным средним значением эффективной площади рассеивания (ЭПР) и получение о них информации с вероятностями правильного обнаружения и ложной тревоги не хуже заданных.
Форма и размеры ЗО зависят от основных параметров РЛС, позиции, на которой она развернута, и ЭПР ВО (рис. 1.2).
а)
| б) | в) |
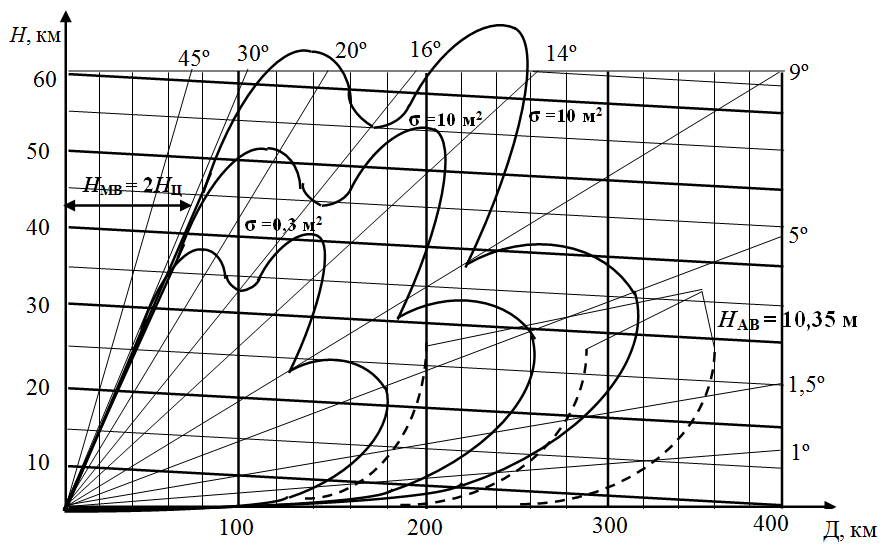
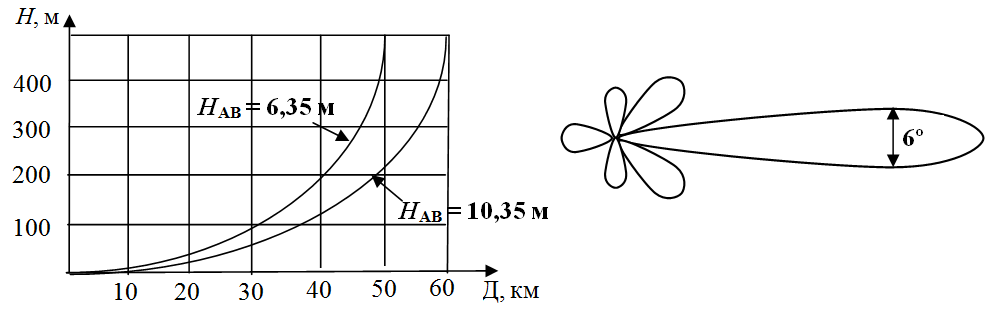
Рис. 1.2. Зона обнаружения РЛС П-18: а – ДНА в вертикальной плоскости; б – ДНА на малых высотах для σ = 1 м2; в – ДНА в горизонтальной плоскости
ЗО РЛС в вертикальной плоскости формируется в соответствии с диаграммой направленности антенны (ДНА) и характеризуется:
- пределами обнаружения по углу места и радиусом «мертвой воронки»;
- потолком беспровальной проводки;
- максимальной дальностью обнаружения.
ЗО РЛС определяется высотой подъема антенны и характером позиции, на которой она развернута. В состав РЛС придается 5 дополнительных секций, длиной 1 м каждая, что обеспечивает установку антенны на требуемую высоту.
Потолок беспровальной проводки при горизонтальном положении антенны и высоте её верхнего этажа H АВ= 6, 35 м по истребителю МиГ-21 составляет 27 км. При наклоне антенны вверх потолок беспровальной проводки увеличивается до 31 км, но при этом дальность обнаружения целей уменьшается на 30 - 40 %.
Наклон антенны вниз обеспечивает компенсацию влияния рельефа местности с равномерным уклоном. Кроме того, наклон антенны вниз используется также для улучшения обнаружения и проводки цели на малых углах места.
При высоте верхнего этажа антенны H АВ= 10, 35 м потолок беспровальной проводки уменьшается, но существенно увеличивается дальность обнаружения целей.
В станции предусмотрен наклон антенны от - 5° до +15°.
Зависимость дальности обнаружения целей (при отсутствии помех) от высоты их полета приведена в табл. 1.1.
Таблица 1.1
| Высота полета цели, м | Дальность обнаружения цели, км | |||
| Истребитель (σ = 1м2) | Крылатая ракета (σ = 0, 3 м2) | |||
| H АН = 3, 9 м | H АВ = 7, 9 м | H АН = 3, 9 м | H АВ = 7, 9 м | |
| 1 000 | ||||
| 5 000 | ||||
| 10 000 | ||||
| 16 000 | ||||
| 20 000 | ||||
| 30 000 |
Зона видимости по углу места (при горизонтальном положении антенны) составляет 30°. Радиус «мертвой воронки» при этом
R M.В. = 2 Н Ц,
где R M.В. – радиус «мертвой воронки», м; Н Ц – высота полета цели, м.
При наклоне антенны на угол +15° зона видимости по углу места увеличивается до 40 - 42°, а радиус «мертвой воронки»
R M.В = Н Ц.
Система вращения антенны обеспечивает режимы: фиксированный – со скоростью 2, 4, 6 об/мин; плавный (вращение вправо - влево) – со скоростью от 0, 5 до 6 об/мин.
НРЗ-4П – изделие 1Л22, обеспечивает работу в системе радиолокационного опознавания «Пароль» (VII диапазон НРЗ) и «Кремний-2М» (III диапазон НРЗ).
Пределы опознавания: по азимуту – от 0 до 360°; по углу места – до 30°. Дальность опознавания не менее дальности обнаружения РЛС.
1.2.2. Информационная способность
и качество радиолокационной информации
Информационная способность характеризуется количеством одновременно сопровождаемых РЛС целей, по которым выдается информация с заданной дискретностью.
При ручном съеме оператор с одного ИКО или ВИКО может выдать плоскостные координаты 8–10 целей с дискретностью 1 мин. С обоих индикаторов можно выдавать данные 16–20 целей.
Время выдачи двух координат с ИКО или ВИКО и время выдачи целеуказания с ВИКО составляет 5–6 с.
Максимальный темп выдачи данных по сопровождаемой цели при скорости вращения антенны 6 об/мин составляет 10 с.
Время выдачи целеуказания и данных трех координат считыванием (при сопряжении с радиовысотомерами) составляет 10–12 с. Темп выдачи данных по сопровождаемой цели в этом случае также составляет 10–12 с.
При сопряжении станции с КСА возможности по выдаче информации определяются возможностями КСА.
Качество выдаваемой информации характеризуется разрешающей способностью и ошибками, которые получаются при измерении координат радиолокационных целей.
Разрешающей способностью называют способность РЛС обеспечивать раздельное обнаружение и измерение координат близко расположенных радиолокационных целей.
Разрешающая способность РЛС на основной частоте (f = 160 МГц) составляет:
- по дальности – не хуже 2 000 м;
- по азимуту – 6–8°.
Разрешающими способностями определяются возможности РЛС по определению количественного состава групповой цели. При указанных разрешающих способностях состав групповой цели можно определить лишь приближённо.
Разрешающая способность изделия 1Л22 в VIIдиапазоне:
- по дальности: в Iрежиме – 500 м, во IIрежиме – 1 000 м, в IIIрежиме – 4 000 м;
- по азимуту (при дальности ³ 30 км) – 2–4°.
Ошибки определения координат цели (в 80 % измерений) составляют:
- по дальности – ±1 800 м, что соответствует СКО sд = 1 400 м.;
- по азимуту – ±(1…1, 5º), что соответствует СКО sb =1, 17º.
От точностных характеристик зависит вероятность наведения истребительной авиации (ИА). Эта вероятность рассчитана для комплекса РЛС П-18 и ПРВ-13. Вероятности наведения ИА зависят не только от параметров РЛС, но и от параметров бортового прицела, скорости самолёта и др. Значит, вероятности наведения зависят от типа истребителей и составляют в среднем от 0, 8 до 0, 5. Такие вероятности удовлетворяют требованиям наведения, кроме конечного участка, где необходима значительно более точная информация. Поэтому РЛС метрового диапазона для наведения ИА используются редко и только в тех случаях, когда РЛС сантиметрового диапазона, обеспечивающие наведение с большей вероятностью, не работоспособны. При обеспечении полетов авиации РЛС П-18, как правило, используется РЛИ только в ближней (приаэродромной) 100-километровой зоне.
Съем координат целей производится с ИКО (ВИКО). Масштабы индикаторов – 90, 180 и 360 км.
Для контроля работы и настройки аппаратуры станции имеется индикатор контроля (ИК). Также по ИК можно производить определение количества самолетов в групповой цели, настройка системы СДЦ для компенсации пассивных помех.
1.2.3. Помехозащищенность
Под помехозащищенностью понимается способность РЛС выдавать информацию о воздушной обстановке при воздействии на нее радиолокационных помех.
В РЛС предусмотрена защита от активных шумовых (АШП), несинхронно-импульсных (НИП) и пассивных помех (ПП).
Защита от АШП осуществляется за счет перестройки частоты РЛС. В пределах рабочего диапазона РЛС может оперативно перестраиваться на одну из четырех фиксированных частот. Диапазон перестройки приёмно-передающей аппаратуры составляет 20 МГц. При применении АШП прицельного типа перестройка рабочей частоты позволяет вынести спектр полезного сигнала за пределы спектра помехи или в область минимальной спектральной плотности мощности помехи.
Кроме того, для защиты от АШП относительно малой интенсивности в РЛС применяется схема шумовой автоматической регулировки усиления приёмника (ШАРУ).
В случае воздействия АШП большой мощности во всем частотном диапазоне РЛС имеется возможность определения пеленга на постановщик АШП.
Защита от ПП и НИП осуществляется с помощью аппаратуры СДЦ.
Защита от ПП реализована при помощи аппаратуры СДЦ, которая выполнена на основе использования когерентно-компенсационного принципа, представляющего собой совмещение когерентно-импульсного метода селекции подвижных объектов с методом череспериодной компенсации.
Аппаратура СДЦ РЛС П-18 позволяет обеспечить обнаружение и проводку ВО с ЭПР 10 м2 в дипольных пассивных помехах с плотностью 1, 5 пачки на 100 м пути. Включение аппаратуры СДЦ в то же время приводит к сжатию ЗО РЛС на 15 - 20 % за счет потерь энергии сигнала при обработке в системе череспериодной компенсации.
Защита от НИП реализована на основе использования метода бланкирования несинхронных помех в каждом периоде повторения и обеспечивается частью аппаратуры СДЦ. Коэффициент подавления несинхронных импульсных помех не хуже 8 - 10.
Защита от ПРЛР в станции осуществляется при помощи режима МЕРЦАНИЕ, позволяющего осуществлять выключение излучения или изменение частоты повторения зондирующих импульсов РЛС через 1, 2 оборота антенны или в заданном азимутальном секторе.
1.2.4. Мобильность и живучесть
Мобильность и живучесть радиоэлектронной техники определяется возможностями передислокации её на новую позицию, условиями транспортировки, сроками развертывания (свертывания) и готовности к боевой работе.
Время включенияпри поданном напряжении питания составляет
3 мин. Время экстренного включения – 1 мин, время выключения – 5 мин.
Время развёртывания РЛС на открытой площадке из походного положения в боевое расчётом 5 человек без установки дополнительных секций антенны составляет 1 ч 20 мин. Для развёртывания РЛС с максимальной высотой антенны (H АВ = 10, 35 м, H АН = 7, 9 м) без выноса ВИКО и сопряжения с АСУ требуется не более 1, 5 часа.
Транспортирование РЛС осуществляется всеми видами транспорта: автомобильным, железнодорожным, водным и воздушным транспортом.
Для перевозки автомобильным транспортом (своим ходом) используются штатные средства («Урал-4320», «Урал-375», «КамАЗ-4320»). Средняя скорость движения по шоссейным дорогам составляет при этом 35 - 40 км/ч, в условиях бездорожья – 5 - 10 км/ч.
Движение своим ходом – основной вид транспортирования станции, так как при передислокации всеми видами транспорта РЛС самостоятельно выдвигается к местам погрузки на железнодорожную станцию, аэродром, морскую или речную пристань.
При совершении марша РЛС следует в колонне. Построение колонны следующее: головной автомобиль – машина АМУ, буксирует прицеп СП-1, второй автомобиль – аппаратная машина, буксирует прицеп СП-2, третий автомобиль – машина изделия 1Л22. Начальник станции должен находиться в кабине головного автомобиля, за рулём – водитель-электромеханник. Первый оператор – в кабине второго автомобиля, за рулём – старший водитель-электромеханник, старший оператор в кабине третьего автомобиля, а за рулём – второй оператор.
При совершении марша проезд под арками, мостами, низко-навешанными проводами разрешается при минимальной высоте 4, 5 м над проезжей частью дороги. Преодоление брода, допустимая глубина которого не более 1 м, совершается на первой передаче без переключения по заранее разведанной и размеченной трассе.
Движение по льду разрешается на малых скоростях. Проезд по мостам соответствующей грузоподъемности разрешается на малой скорости без рывков и переключения передач.
Для перевозки РЛС П-18 железнодорожным транспортом требуются две 4-осные или четыре 2-осные платформы. При наличии в составе РЛС изделия 1Л22 для его размещения требуется ещё одна 4-осная платформа. Все транспортные единицы РЛС вписываются в железнодорожный габарит
02-ВМ (0-2Т), за исключением изделия 1Л22 (для вписываемости изделия в «габарит погрузки» железных дорог антенна изделия – блок 08013400 (08013100А) – должна быть снята). Габариты и масса транспортных единиц приведены в табл. 1.2.
Таблица 1.2
| Условное наименование | Длина, м | Ширина, м | Высота, м | Масса, кг |
| Аппаратная машина | 2, 5 | 3, 105 | 12 430 | |
| Машина АМУ | 7, 465 | 2, 62 | 3, 31 | 12 936 |
| Прицеп ПС-1 | 5, 37 | 2, 44 | 3, 25 | 6 545 |
| Прицеп ПС-2 | 5, 37 | 2, 44 | 3, 25 | 6 631 |
| Машина изделия 1Л22 | 2, 7 | 3, 34* (3, 86) | 12 220* (12 850) |
*высота и масса изделия 1Л22 в походном положении со снятым блоком 08013400 (08013100А) – антенна изделия; в скобках указаны высота и масса в походном положении без снятия антенны.
При транспортировании водным транспортом автомобили и прицепы РЛС размещаются в трюмах и твиндеках судов.
При транспортировании РЛС воздушным транспортом требуется три транспортных самолёта типа АН-22.
Эксплуатационные характеристики РЛС:
РЛС работоспособна при температуре окружающего воздуха от – 40º до +50 º С.
Конструкция антенной системы позволяет обеспечить работу РЛС при следующих метеорологических условиях:
- скорости ветра до 20 м/с без обледенения антенны – на скоростях вращения антенны 2, 4, 6 об/мин;
- скорости ветра до 30 м/с без обледенения антенны – на скорости вращения антенны 2 об/мин;
- скорости ветра до 10 м/с и обледенении антенны толщиной до 10 мм корки льда – на скоростях вращения антенны 2, 4, 6 об/мин.
Живучесть РЛС обуславливается возможностью ее работы из окопа (с дополнительными секциями АМУ), инженерным оборудованием и маскировкой позиции (рис. 1.3), а также возможностью управления РЛС с помощью аппаратуры дистанционного управления с ВИКО.

Рис. 1.3. Вариант размещения РЛС П-18 в защищенном инженерном сооружении
От РЛС ВИКО может удаляться на 500 м и располагаться в заглубленном ПУ или на КП. Это обеспечивает защиту личного состава расчета и материальной части от поражающих факторов ядерного взрыва.
Средняя наработка РЛС на отказ (Т о) – 135 ч; средний ресурс –
11 000 ч; средний срок службы до капитального ремонта – 11 лет.
Питание РЛС осуществляется трехфазным током напряжением 220 В частотой 50 Гц от собственных агрегатов питания или от промышленной сети. Имеется возможность подключения РЛС к промышленной сети напряжением 380 В 50 Гц через разделительный трансформатор, который входит в комплект РЛС (в прицепе СП-1). Потребляемая мощность не более 10 кВт. Расход топлива агрегатом АД-10-Т/230-М составляет 4, 6 кг/ч. Переход с одного агрегата питания на другой или промышленную сеть производится без выключения станции.
1.2.5. Технические характеристики радиолокационной станции П-18
1. Диапазон рабочих частот – 150–170 МГц: основная частота –
160 МГц, рабочая основная частота – 155 МГц
2. Длительность импульса – 6 мкс.
3. Мощность передающего устройства (ПДУ): импульсная – не менее 180 кВт, средняя – 500 Вт.
4. Частота повторения: при внутреннем симметричном запуске –
365 Гц; при внутреннем не симметричном запуске коэффициент несимметрии составляет 1, 25 от симметричного запуска;
5. Частота повторения при внешнем симметричном и несимметричном запуске – 325–375 Гц.
6. Коэффициент шума приемника – не хуже 2, 3.
7. Промежуточная частота – 24, 6 МГц.
8. Полоса пропускания приемника – 200 кГц.
9. Коэффициент усиления антенны – 250 - 300.
10. Уровень бокового излучения относительно основного лепестка ДНА: 20 дБ – 1-й боковой лепесток на основной частоте; 14–15 дБ – в остальном диапазоне частот.
11. Ширина диаграмма направленности в горизонтальной плоскости по уровню 0, 5 мощности – 6 - 8º.
12. Скорость вращения антенны: 0, 5–6 об/мин (плавно); 2, 4,
6 об/мин ±5 % (фиксирована).
13. Наклон антенны в вертикальной плоскости от – 5º до +15º.
14. Время наработки на один отказ – 140 ч.
15. Время включения 3 мин.
16. Время выключения 5 мин.
17. Время развертывания расчетом из 5 человек – 1 ч 20 мин.
Таким образом, РЛС П-18 по своим возможностям относится к классу РЛС дежурного режима. Высокая мобильность РЛС позволяет применять её в составе мобильных подразделений РТВ в качестве резерва для наращивания и восстановления радиолокационного поля. При обеспечении полетов авиации, РЛС П-18 можно применять для обеспечения РЛИ в ближней (приаэродромной) 100-километровой зоне.
Контрольные вопросы
1. Каково назначение РЛС П-18 в радиолокационной системе РТВ ВВС?
2. Каким образом обеспечивается помехозащищённость РЛС от активных помех?
3. Какие технические характеристики РЛС влияют на формирование и размеры ЗО?
4. Каким образом обеспечивается высокая мобильность РЛС?
5. Каким образом в РЛС решается задача по уменьшению радиуса «мёртвой воронки»?
6. Каким образом обеспечивается высокая живучесть РЛС?
ГЛАВА 2
ВЫБОР ПОЗИЦИИ И РАЗВЕРТЫВАНИЕ
РАДИОЛОКАЦИОННОЙ СТАНЦИИ П-18
2.1. Особенности радиолокационных станций
метрового диапазона волн
По сравнению с РЛС сантиметрового и дециметрового диапазона волн, РЛС дежурного режима метрового диапазона обладает рядом преимуществ, способствующих успешному решению задач по обнаружению ВО:
1. В РЛС метрового диапазона волн, при прочих равных условиях, могут быть обеспечены повышенные дальность и потолок обнаружения ВО (особенно малоразмерных) по нижеперечисленным причинам:
а) в этом диапазоне волн ЭПР аэродинамических ВО на 1–2 порядка больше, чем в сантиметровом и дециметровом. Причиной этого является наличие у целей элементов конструкций, соизмеримых с длиной волны РЛС, в результате чего при облучении имеют место резонансные явления, увеличивающие интенсивность отраженной волны;
б) формирование ДНА происходит с участием земной поверхности. Явления интерференции электромагнитного поля в отдельных угломестных направлениях приводят к возрастанию мощности сигнала и соответственно увеличению дальности обнаружения ВО. При этом на других направлениях дальность обнаружения будет снижена за счет формирования провалов ДНА;
в) меньше потери на поглощение и рассеяние электромагнитной энергии в атмосфере при её распространении;
г) коэффициент шума приемников обычно несколько меньше, чем в сантиметровом и дециметровом диапазонах.
2. В метровом диапазоне более устойчива проводка обнаруженных ВО: вероятность обнаружения ВО в границах зоны видимости менее зависит от дальности, чем в сантиметровом диапазоне. Это объясняется меньшей изрезанностью диаграммы вторичного излучения ВО сложной геометрической формы.
3. В этом диапазоне волн практически не наблюдаются отражения от гидрометеообразований, так как они представляют собой тела шарообразной формы. ЭПР таких тел, имеющих диаметр d, прямо пропорциональна отношению d 6/l4, где l – длина волны облучающих колебаний. Поэтому ЭПР капель и их совокупности в метровом диапазоне ничтожно мала.
4. РЛС метрового диапазона более помехоустойчивы к воздействию пассивных помех, чем РЛС сантиметрового диапазона. Это объясняется тем, что в метровом диапазоне:
а) меньше ширина спектра флуктуаций помех ∆ F = 2 ∆ V Р/l, где ∆ V Р – разброс радиальных скоростей отражателей в импульсном объеме РЛС;
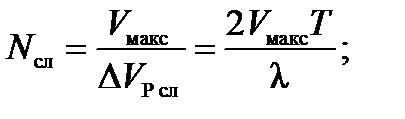
б) больше интервал между соседними значениями слепых скоростей в диапазоне возможных скоростей целей 0 - V макс, определяемый как
∆ V Р сл = l/2 T, где Т – период повторения РЛС. Количество слепых скоростей:
в) выше абсолютная стабильность частоты передающего устройства.
Таким образом, из-за указанных преимуществ метровый диапазон волн широко используется в РЛС дежурного режима, для которых наиболее существенный недостаток метрового диапазона волн, связанный с практической невозможностью получения высоких точностей и разрешающих способностей по угловым координатам, имеет меньшее значение вследствие пониженных требований к этим характеристикам. Требования к точностным характеристикам и разрешающим способностям РЛС дежурного режима определяются тем, что информация, выдаваемая ими, используется, как правило, для решения задач управления на этапе приведения войск в повышенные степени боевой готовности.
2.2. Выбор позиции
Позиция выбирается на местности, обеспечивающей круговой обзор воздушного пространства. РЛС П-18 является станцией метрового диапазона, поэтому при выборе позиции необходимо учитывать существенное влияние рельефа местности на формирование ДНА в вертикальной плоскости.
На формирование ДНА РЛС существенно влияет рельеф местности в радиусе до 1 000 м от точки стояния станции. Площадка должна быть ровной, горизонтальной. Размеры ровной площадки должны быть не меньше области, существенной для отражения радиоволн, и определяются, в основном, размерами первой зоны Френеля. Радиус ровной площадки R П на практике определяется из соотношения
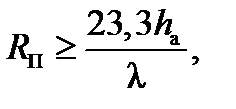
где h а – высота электрического центра антенны над поверхностью.
Допустимая величина неровностей площадки определяется критерием Релея по формуле
где Q – угол падения электромагнитной энергии.
Исходя из приведенных выше соотношений, для РЛС П-18 лучшей позицией является ровная горизонтальная площадка радиусом 500 - 1 000 м на открытой местности или вблизи водной поверхности.
При этом допускаются отдельные неровности (возвышенности, впадины) высотой (глубиной):
- на расстоянии 100 м от антенны – не более 1 м;
- на расстоянии 500 м – до 3 м;
- на расстоянии 1 000 м – до 5 м.
Угол уклона площадки не должен превышать 2°, а угол подъема – 0, 5°.
Углы закрытия должны быть не более 15'. На реальной позиции они определяются по формуле

Здесь γ закр – угол закрытия, мин; h ц– высота полета цели над подстилающей поверхностью, м; h а– высота электрического центра антенны, м; h поз – высота позиции над подстилающей поверхностью; R З.экв – эквивалентный радиус Земли для нормальной рефракции, равный 8 500 км; Добн – дальность обнаружения станции с учетом коэффициента использования радиогоризонта:

где К – коэффициент использования радиогоризонта (для П-18 ≈ 0, 55).
РЛС должна располагаться на расстоянии не менее 1 000 м от лесного массива, железобетонных конструкций, высоковольтных линий передач, линий связи и на расстоянии не менее 2 000 м от населенных пунктов. Отдельно растущие деревья, кустарники на формирование ДНА существенного влияния не оказывают и могут служить в целях маскировки.
При наличии водной поверхности РЛС необходимо располагать на отлогом берегу не далее 100 м от берега при ширине зеркала водной поверхности не менее 400 м таким образом, чтобы водная поверхность была в ответственном секторе.
Ответственный сектор назначается для каждой позиции РЛС исходя из поставленной задачи радиотехническому подразделению по ведению радиолокационной разведки. Выбор ответственного сектора производится в следующих направлениях:
- в сторону наиболее вероятного появления средств воздушного нападения противника;
- государственной границы;
- района полётов своей авиации по плану боевой подготовки;
- района полигонов для проведения стрельб ЗРВ и ИА;
- позиционного района расположения своих войск;
- промышленных и административных объектов;
- важных объектов коммуникаций.
Позиция должна иметь подъездные пути, позволяющие транспортировать аппаратуру станции. Благоприятными условиями для жизни, быта личного состава являются наличие:
- источников водоснабжения,
- местных строительных материалов,
- сетей связи,
- линий электропередач.
Окончательный выбор позиции производится после ее топографической обработки.
Машины и прицепы станции П-18 на позиции могут располагаются двумя вариантами: на одной линии и рассредоточено (Рис.2.1 и Рис.2.2).
Расположение машин и прицепов станции на позиции в линию – основной вариант. Схема размещения показана на рис. 2.3.
Вариант размещения на одной линии наиболее полно реализует боевые возможности РЛС по ведению радиолокационной разведки вкруговую. Имеются два незначительных провала в зоне обнаружения РЛС по направлению в сторону силовых прицепов и машины изделия 1Л22.

Рис. 2.1. Расположение машин и прицепов РЛС на позиции вариантом в линию

Рис. 2.2. Расположение машин и прицепов РЛС на позиции вариантом рассредоточено
Расстановка машин и прицепов в линию производится таким образом, чтобы биссектриса ответственного сектора была перпендикулярна линии размещения машин и прицепов станции. При наличии на позиции других комплектов РЭТ (другого ВВТ) размещение РЛС производится с учётом применения всего вооружения радиотехнического подразделения. При этом наиболее целесообразным с точки зрения использования РЛС является размещение в линию таким образом, чтобы кабины (прицепы, антенны) другого вооружения не попадали в ответственный сектор, а входная дверь аппаратной машины не находилась в направлении прямого излучения другой РЭТ.
Недостаток варианта на одной линии – растянутая по фронту полоса позиции. Соответственно – сравнительная трудность выполнения маскировки позиции и оборудование укрытий для машин и прицепов станции, а так же обеспечение наземной обороны позиции.
Рис. 2.3. Расположение машин и прицепов РЛС на позиции (вариант в линию):
1 – аппаратная машина; 2 – машина АМУ; 3 – силовой прицеп ПС-1;
4 – силовой прицеп ПС-2; 5 – изделие 1Л22; 6 – ВИКО
Вариант размещения рассредоточено применяется тогда, когда имеется возможность разместить машины и прицепы станции в укрытиях, которые уже имеются на позиции и пригодны для расстановки элементов РЛС. Кроме того, этот вариант используется на позициях, когда пригодная для размещения машин РЛС площадка ограничена в размерах. При этом должно выполняться условие – возможность размещения аппаратной машины слева или справа от машины АМУ (в зависимости от взаимного положения машин), но так, чтобы выход линейного фидера был со стороны машины АМУ. Расстояние между машинами не более 1, 5–2 м. Расстановка остальных силовых прицепов и машины изделия 1Л22 производится на тех же расстояниях, что и при варианте в линию – с учётом длины кабельного хозяйства. Силовые прицепы в любом из вариантов расставляются так, чтобы расстояние между ними было не более 3–3, 5 м, а их входные двери располагались напротив друг друга.
Требования к варианту размещения рассредоточено те же, что и в линию:
- максимальная реализация боевых возможностей по ведению радиолокационной разведке и проводке ВО в направлении ответственного сектора;
- отсутствие в ответственном секторе неровностей местности, кабин (прицепов, антенн) другого вооружения подразделения;
- входная дверь аппаратной машины не должна находится в направлении прямого излучения другой РЭТ.
Недостаток варианта размещения рассредоточено – в зоне обнаружения РЛС имеются провалы (более широкие и глубокие по сравнении с вариантом в линию) по направлению в сторону силовых прицепов и машины изделия 1Л22
Следует помнить, что точка стояния РЛС в любом из вариантов размещения на позиции привязана к точке стояния машина АМУ.
Площадка для развертывания РЛС оборудуется согласно «Инструкции по эксплуатации РЛС (Жг1.231.001 ИЭ)».
Грунт площадки в местах установки автомашин и прицепов должен быть утрамбован, а в местах установки штатных подставок под домкраты машин и прицепов РЛС дополнительно укрепляется бетонными плитами, бутовым камнем, песчаной гравийной смесью и т.д.
Для защиты РЛС от воздействия осколков бомб и оружия массового поражении машины и прицепы могут располагаться в укрытиях (капонирах). Расположение машин и прицепов в укрытиях показано на рис. 2.5.
Капонир (фр. Caponniere – ниша) – обвалованное место стоянки техники на позиции, защищающее его от воздействия осколков, ударной волны, а также (при ядерном взрыве) от светового излучения. Кроме того, капониры затрудняют ведение разведки относительно позиции и определения на ней сил и типов ВВТ.
Укрытие (капонир) для машин РЛС П-18 выполняется специальной Т-образной формы. Глубина укрытия относительно местности должна быть 3±0, 2 м (высота наката укрытия не учитывается) для размещения станции с высотой антенны h Н= 3, 9 м, h В= 6, 35 м (с использованием трёх дополнительных секций мачты антенны) и с высотой антенны h Н= 5, 9 м, h В= 8, 35 м (с использованием пяти дополнительных секций мачты антенны). Глубина укрытия для изделия 1Л22 не должна снизить боевые возможности НРЗ-4П – обеспечить зону опознавание ВО в пределах, не менее зоны обнаружения РЛС.
а)
б)
Рис. 2.5. Расположение машин и прицепов РЛС в укрытии (капонире):
а – аппаратная машина, машина АМУ, изделие 1Л22; б – прицепы ПС-1 и ПС-2
2.3. Развертывание радиолокационной станции П-18
По прибытии на позицию транспортной колонны начальник РЛС указывает старшим машин места установки машин и силовых прицепов.
Охрана и оборона позиции организуется в соответствии с указаниями командира подразделения.
Перед началом развертывания начальник РЛС выстраивает расчет и напоминает о соблюдении мер техники безопасности, определяет порядок и последовательность развертывания РЛС.
Для развертывания РЛС начальник РЛС подает команду: «РАЗВЕРНУТЬ СТАНЦИЮ» –и руководит работой расчета. Порядок развертывания РЛС приведен в прил. 2.
По окончанию развёртывания РЛС производится юстировка антенно-фидерной системы РЛС.
Юстиро́ вка (от нем. justieren выверять) – совокупность операций по выравниванию конструкций и конструктивных элементов (поверхностей, столбов, стоек и т.д.) вдоль некоторого направления («осевого»), а также по приведению меры, измерительного или оптического прибора, механизмов (или их части) в рабочее состояние, обеспечивающее точность, правильность и надежность их действия.
Юстировка антенны производится только после горизонтирования антенной машины (машины АМУ).
Горизонтирование антенной машины производится по 2 уровням, расположенным на приводе вращения антенны блок 31 (редуктор). Один уровень поперечный, второй – продольный. Домкратами антенной машины необходимо добиться, чтобы на обоих уровнях пузырьки газа находились по центру. (Максимальное отклонение пузырьков – ± 0, 5 деления от центра).
Для большей точности поперечное и продольное горизонтирование производится 2–3 раза последовательно друг за другом.
Юстировка антенны производится с помощью оптического прибора – буссоли ПАБ-2М (перископическая артиллерийская буссоль), входящей в комплект ЗИП РЛС.
Для юстировки антенны буссоль ПАБ-2М разворачивается на расстоянии 50–60 метров на треноге. С помощью крепления и собственного уровня буссоль горизонтируется.
Антенна юстируется продольно и поперечно.
Первоначально антенна юстируется поперечно. Для этого визирное устройство буссоли наводится на центр антенны, а сама антенна устанавливается так, чтобы траверсы антенны находились перпендикулярно оптической оси визирного устройства буссоли.
С помощью поворотного механизма буссоли визирное устройство поворачивается влево и вправо вдоль траверсов антенны. Оба траверса должны находиться на одном уровне. Уровень проверяется по горизонтальной шкале визирного устройства буссоли. В случае расхождения уровней с помощью вертикальных расчалок (натяжением или ослаблением) добиваются подъёма (опускания) левого или правого траверса.
После поперечной юстировки антенны осуществляется продольная юстировка. Для этого вращение антенны включается в режим плавного вращения. С помощью регулировки плавного вращения необходимо добиться, чтобы траверсы антенны находились параллельно оптической оси визирного устройства буссоли. При этом оба траверса антенны должны в объективе визирного устройства буссоли «слиться» в одну точку, а откосы – в одну вертикальную линию.
В случае невозможности добиться слияния траверсов в одну точку (откосов – в одну вертикальную линию) с помощью горизонтальных расчалок (натяжением или ослаблением) добиваются их «слияния».
Для большей точности юстировка антенны (продольная и поперечная) производится 2–3 раза последовательно друг за другом.
По окончании развертывания и юстировки РЛС производится проверка работы аппаратуры под током согласно «Инструкции по эксплуатации РЛС». При работе на РЛС личный состав должен строго выполнять правила техники безопасности.
2.4. Ориентирование радиолокационной станции П-18
Ориентирование РЛС производится с помощью выносного гетеродина (блок 70), специальной подставки-треноги УЦ4.115.030 Сп и буссоли ПАБ-2М, входящих в состав ЗИП РЛС.
Ориентирование РЛС заключается в совмещении направления линии развертки на экране индикатора (по его электрической азимутальной шкале) с истинным азимутом электрической оси антенны (блока 1)[*]. Электрической осью антенны является ось симметрии основного лепестка ДНА в горизонтальной плоскости. Ось симметрии основного лепестка ДНА выбирается по середине основного максимума контура ДНА, отображаемого на ИКО от выносного гетеродина.
Ориентирование РЛС производится только после тщательной проверки и настройки ИКО (в соответствии с инструкцией по эксплуатации Жг1.231.001 ИЭ).
Ориентирование РЛС рекомендуется производить в такой последовательности (рис. 2.6):
- установить и отгоризонтировать буссоль на опорной точке, опорная точка должна находиться на расстоянии не менее 125 м от РЛС;
- пользуясь карточкой топопривязки, перевести значение азимута ориентира № 1 (2) в деления шкалы буссоли (одно большое деление соответствует 6°, одно малое деление – 3, 6');
- установить на лимбе буссоли (шкала и нониус Y) полученные деления азимута на ориентир № 1 (2) и навести окуляр буссоли на ориентир № 1 (2). При этом буссоль оказывается сориентированной относительно истинного азимута с учетом магнитного склонения;
Рис. 2.6. Ориентирование РЛС:
1 – машина АМУ; 2 – столик выносного гетеродина; 3 – выносной гетеродин;
4 – ориентир № 1; 5 – опорная точка; 6 – ориентир № 2
- подготовить выносной гетеродин (блок 70) к работе, проверив исправность питания гетеродина; ввернуть штыревую антенну в гнездо на верхней крышке гетеродина так, чтобы она была горизонтальна земле;
- поставить выключатель гетеродина ПИТАНИЕ–ВКЛ. в положение ВКЛ.;
- ручку М–НАКАЛ–Б ввести вправо, а выключатель МОДУЛ.–ВЫКЛ. установить в положение МОДУЛ.;
- включить станцию;
- повернуть ручку УСИЛЕНИЕ на блоке 56 (ИК) вправо до упора;
- тумблер ШАРУ–РРУ на блоке 12М установить в положение РРУ;
- ручкой РРУ на блоке 12М установить минимальное усиление приёмника РЛС;
- медленно вращая ручку НАСТРОЙКА, настроить гетеродин на рабочую частоту РЛС по максимальному сигналу на экране контрольного индикатора блока 56, не допуская ограничение сигнала путём поворота ручки М.НАКАЛ Б. на блоке 70 влево. После настройки ручку НАСТРОЙКА застопорить, а ручку М.НАКАЛ Б. повернуть вправо до упора;
- установить выносной гетеродин на высоте 1, 5–2 м от земли (на специальной подставке-треноге УЦ4.115.030 Сп) на расстоянии 100 м от РЛС; на линии монокуляр буссоли – ось симметрии блока 1;
- навести буссоль на середину блока 1 и антенну гетеродина, при этом вертикальная линия окуляра буссоли должна совместиться с вертикальной осью симметрии блока 1 (ось симметрии определяется посередине среза верхней секции мачты или по верхней стойке крестовины траверсы);
- сосчитать деления шкалы и нониуса Y буссоли и перевести их в градусы; полученное значение угла β г является истинным азимутом выносного гетеродина на антенну станции;
- определить истинный азимут β и с точки стояния станции на гетеродин по формуле
β и = β г ± 180°;
- определить направление электрической оси блока 1 на гетеродин, для чего на блоке 17 установить выключатель СИГН. ОРИЕНТ.– ВЫКЛ. в положение СИГН. ОРИЕНТ.;
- нажать кнопку 4 на блоке 11М (скорость 4 об/мин);
- переключатель МАСШТАБ на блоке 10 установить в положение 2;
- при вращении антенны на экране ИКО должен наблюдаться (высвечиваться сплошной линией) контур диаграммы направленности антенны в горизонтальной плоскости;
- ручками УСИЛЕНИЕ на блоках 10, 12М добиться, чтобы контур диаграммы направленности антенны не выходил за края экрана ИКО и не был ограничен;
- установить антенну (режим вращения ПЛАВНО) на средний азимут максимума основного лепестка ДНА (на максимальное отклонение линии контура ДНА к краю индикатора);
- произвести ориентирование блока 29, для чего на блоке 29 снять колпак с оси ОРИЕНТ. и поворотом оси ОРИЕНТ. (специальным ключом) установить на шкалах грубого и точного отсчета угол, равный β и;
- записать истинный азимут гетеродина β и в формуляр станции.
Произвести ориентирование развертки на ИКО, для чего:
- нажать кнопку 4 на блоке 11М (скорость 4 об/мин);
- установить переключатель отметок азимута (ОА) на блоке 17 в положение ОА–0 и заметить положение отметки СЕВЕР на индикаторе; перевести переключатель в положение ОА5–30 и заметить расположение отметок 5º и 30º относительно отметки СЕВЕР (отметка СЕВЕР совпадает с одной из 30º отметок);
- поворачивая шлиц ОРИЕНТ. (под пробкой) на блоке 17, установить на ИКО отметку СЕВЕР на угол β и относительно среднего азимута максимума основного лепестка ДНА (относительно максимума отклонения линии контура ДНА на индикаторе). Отсчёт производить по азимутальным отметкам 5º (положение отметки СЕВЕР было замечено ранее и оно совпадает с одной из отметок 30º);
- переключатель отметок азимута на блоке 17 установить в положение ОА–0 и, поворачивая шлиц ОРИЕНТ. в шкафу 1б, установить отметку СЕВЕР в вертикальное положение – на риску 0° графической шкалы светофильтра ИКО;
- установить поворотом с помощью отвёртки стрелку ОРИЕНТ. механизма ВТ на шкафу 1Б на нулевой отсчёт.
Ориентирование РЛС в ночное время.
Для ориентирования в ночное время в ЗИП РЛС придается переносная фара на 12В – УЦ2.423.009 Сп, стекло (для фары) – УЦ5.809.003 и светомаскировочный фонарь – УЦ4.816.034 Сп для освещения антенны гетеродина.
Ориентирование РЛС в ночное время производится в следующем порядке:
- закрыть переносную фару светомаскировочным стеклом, крючком прикрепить ее к поворотной площадке мачты строго посередине, при этом стекло фары должно быть обращено к гетеродину;
- подключить фару к 12-вольтовой розетке аппаратной машины;
- подготовить к работе и настроить гетеродин, на его кожухе закрепить светомаскировочный фонарь и подключить фонарь к аккумулятору НКН-45, на время ориентирования устанавливаемый рядом с гетеродином;
- осветить буссоль согласно инструкции по эксплуатации;
- произвести ориентирование буссоли по магнитной стрелке с учетом магнитного склонения (если не наблюдается ни один из ориентиров);
- совместить вертикальную линию окуляра буссоли с фонарем гетеродина и светомаскировочной фарой на мачте блока 1; в остальном порядок ориентирования в ночное время такой же, как и днем.
|
|