Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Енергетична діаграма й основні рівняння синхронного двигуна.
|
|
Синхронна машина, як будь-яка електрична машина, оборотна, тобто може працювати як у руховому, так і в генераторному режимах. Однак особливості роботи машини в тому або іншому режимі висувають різні вимоги до її конструктивного виконання. Найбільш істотною відмінністю умов роботи синхронного двигуна є процес включення його в, називаний пуском.
Власний пусковий момент синхронного двигуна дорівнює нулю, тому що внаслідок інерції потік порушення  не може відразу досягти синхронної частоти обертання потоку
не може відразу досягти синхронної частоти обертання потоку  . Тому після включення порушення двигуна в мережу при
. Тому після включення порушення двигуна в мережу при  поля і переміщаються відносно один одного з великою швидкістю, і середня взаємодія цих полів дорівнює нулю.
поля і переміщаються відносно один одного з великою швидкістю, і середня взаємодія цих полів дорівнює нулю.
Пуск синхронного двигуна можна здійснити за допомогою перетворювача частоти, який плавно підвищує частоту обертання поля якоря від нуля до номінального значення в міру розгону двигуна. Такий спосіб пуску називається частотним. Можливий також пуск синхронного двигуна за допомогою додаткового асинхронного двигуна, що здійснює попередній розгін недозбудженого синхронного двигуна до подсинхронной частоти обертання. Потім проводиться включення синхронного двигуна в мережу і його синхронізація по методу грубої синхронізації подібно тому, як це робиться для синхронних генераторів.

|
Однак найпоширенішим є асинхронний пуск синхронного двигуна. Із цією метою на роторі в спеціальних пазах полюсних наконечників явно полюсних синхронних двигунів розміщають короткозамкнену обмотку (мал. 5.43) у вигляді латунних, мідних або бронзових стрижнів 1, з'єднаних по торцях короткозамыкающими кільцями 2. Ця обмотка називається пусковий. При використанні масивних плюсів, а також у випадку неявнополюсных синхронних двигунів з ротором у вигляді масивного сталевого циліндра роль пускової обмотки виконує зовнішня поверхня полюсів або циліндра ротора.
Схема асинхронного пуску представлена на мал. 5.44. Відповідно до цієї схеми процес пуску виконується у два етапи. На першому етапі після включення обмотки статора в мережу ротор двигуна розганяє під дією асинхронного моменту до подсинхронной частоти обертання. Ковзання ротора

|
 .
.
Обмотка збудження протягом першого етапу пуску замикається на активний опір  . Залишати обмотку збудження розімкнутої не можна, тому що обертове поле статора наводить у ній у початковий період пуску значну ЭДС, здатну «пробити» ізоляцію обмотки збудження й небезпечну для експлуатаційного персоналу.
. Залишати обмотку збудження розімкнутої не можна, тому що обертове поле статора наводить у ній у початковий період пуску значну ЭДС, здатну «пробити» ізоляцію обмотки збудження й небезпечну для експлуатаційного персоналу.

|
Замикати обмотку збудження накоротко також недоцільно, тому що при цьому зростають провали в кривій асинхронного моменту  (мал.5.45). Обмотка збудження є однофазною обмоткою. Індукований у ній струм створює пульсуюче магнітне поле. Прямо обертова складова цього поля створює момент
(мал.5.45). Обмотка збудження є однофазною обмоткою. Індукований у ній струм створює пульсуюче магнітне поле. Прямо обертова складова цього поля створює момент  , а назад обертова складова -
, а назад обертова складова -  (див. п.4.13.2). При підсумовуванні цих моментів з моментом пускової обмотки
(див. п.4.13.2). При підсумовуванні цих моментів з моментом пускової обмотки  у кривій результуючого моменту
у кривій результуючого моменту  з'являються провали в зоні малих ковзань і в області ковзання
з'являються провали в зоні малих ковзань і в області ковзання  , які можуть утруднити пуск двигуна. Уведення в ланцюг обмотки збудження додаткового опору
, які можуть утруднити пуск двигуна. Уведення в ланцюг обмотки збудження додаткового опору  дозволяє зменшити величину цих провалів. Для оцінки пускових властивостей синхронного двигуна використовуються три показники:
дозволяє зменшити величину цих провалів. Для оцінки пускових властивостей синхронного двигуна використовуються три показники:
кратність пускового моменту  ;
;
кратність максимального моменту  ;
;
кратність вхідного моменту  .
.
Вхідний момент визначається при ковзанні  , приблизно відповідному до верхнього рівня ковзання, при якім двигун може ввійти в синхронізм після подачі порушення. Момент опору на валу двигуна
, приблизно відповідному до верхнього рівня ковзання, при якім двигун може ввійти в синхронізм після подачі порушення. Момент опору на валу двигуна  повинен бути асинхронного моменту, що менше
повинен бути асинхронного моменту, що менше  розвивається двигуном, / (мал. 5.45). Різниця моментів і визначає динамічний момент
розвивається двигуном, / (мал. 5.45). Різниця моментів і визначає динамічний момент
 .
.
Чим більше динамічний момент, тем менше час пуску
 .
.
Якщо динамічний момент малий, то пуск затягається. Це може привести до перегріву обмотки статора й пускової обмотки через значні струми, що протікають по цих обмотках при асинхронному пуску. Пусковий струм статорної обмотки (при  ) у кілька раз перевищує номінальний струм і звичайно становить
) у кілька раз перевищує номінальний струм і звичайно становить
 .
.
Другий етап пуску починається, коли ротор досягне частоти, що встановився, обертання ( /), і обмотка збудження підключається до джерела постійного струму (збудникові). Після включення порушення на ротор крім асинхронного моменту починає діяти синхронний момент
/), і обмотка збудження підключається до джерела постійного струму (збудникові). Після включення порушення на ротор крім асинхронного моменту починає діяти синхронний момент  , що залежить від струму порушення
, що залежить від струму порушення  і кута q,
і кута q,
 .
.

|
На рис. 5.46 представлені залежності моменту і ковзання s для різних моментів включення порушення.
При відсутності порушення ковзання в асинхронному режимі, що встановився, змінюється по кривій 1. Її нелінійний характер пояснюється магнітною несиметрією ротора по осях d і q (для неявно полюсного двигуна ковзання постійне й не залежить від положення ротора).
При подачі порушення в момент  (рис. 5.46, а) синхронний момент
(рис. 5.46, а) синхронний момент  позитивний і, складаючись із асинхронним моментом
позитивний і, складаючись із асинхронним моментом  , приводить до зменшення ковзання (крива 2). Ротор досягає синхронної частоти обертання й після декількох хитань виходить на режим, що встановився (
, приводить до зменшення ковзання (крива 2). Ротор досягає синхронної частоти обертання й після декількох хитань виходить на режим, що встановився ( /,
/,  /).
/).
При подачі порушення в момент  (рис. 5.46, б) виникаючий синхронний момент буде діяти проти напрямку обертання ротора. Тому ковзання ротора на інтервалі, коли момент /, зростає (крива 2), і умови для синхронізації на інтервалі позитивного моменту (/) погіршуються. Ротор досягає синхронної частоти обертання після одного або декількох проворотів, а при несприятливих умовах синхронізація двигуна може виявитися неможливою.
(рис. 5.46, б) виникаючий синхронний момент буде діяти проти напрямку обертання ротора. Тому ковзання ротора на інтервалі, коли момент /, зростає (крива 2), і умови для синхронізації на інтервалі позитивного моменту (/) погіршуються. Ротор досягає синхронної частоти обертання після одного або декількох проворотів, а при несприятливих умовах синхронізація двигуна може виявитися неможливою.

|
Робочі властивості синхронних двигунів можуть бути досліджені за допомогою рівнянь і векторних діаграм, отриманих для синхронних генераторів (див. п. 5.11 і 5.12). Основним режимом синхронних двигунів є режим при  . Цей режим описується U-Образними характеристиками (рис. 5.47), які практично повторюють U-Образні характеристики генератора. Відрізняється лише U-Образна характеристика в режимі холостого ходу
. Цей режим описується U-Образними характеристиками (рис. 5.47), які практично повторюють U-Образні характеристики генератора. Відрізняється лише U-Образна характеристика в режимі холостого ходу  , коли для своєї роботи двигун споживає з мережі активний струм
, коли для своєї роботи двигун споживає з мережі активний струм  .
.
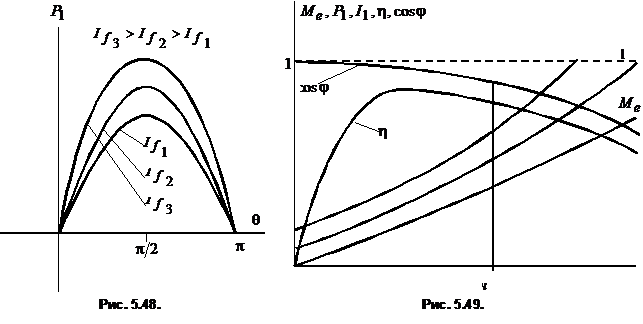
Іншим характерним режимом є робота двигуна при постійнім порушенні ( ) і змінному навантаженню (
) і змінному навантаженню ( ). Характеристиками цього режиму є кутові (рис. 5.48) і робочі характеристики (рис. 5.49).
). Характеристиками цього режиму є кутові (рис. 5.48) і робочі характеристики (рис. 5.49).
Кутові характеристики побудовані без обліку знака кута й потужності для трьох значень струму порушення. Вони показують, що синхронні двигуни допускають регулювання максимального моменту. Це має дуже важливе значення в аварійних режимах для збереження стійкості паралельної роботи двигуна з мережею.
|
Робочі характеристики (рис. 5.49) побудовані при струмі порушення  (рис. 5.47). З ростом навантаження
(рис. 5.47). З ростом навантаження  падає, двигун переходить у режим споживання реактивної потужності (
падає, двигун переходить у режим споживання реактивної потужності ( ). При автоматичнім регулюванні струму порушення можна забезпечити роботу двигуна з будь-яким заданим законом зміни коефіцієнта потужності.
). При автоматичнім регулюванні струму порушення можна забезпечити роботу двигуна з будь-яким заданим законом зміни коефіцієнта потужності.
Синхронні двигуни звичайно проектують для роботи в режимі перепорушення ( ) з коефіцієнтом потужності
) з коефіцієнтом потужності  . Це дозволяє зменшити реактивну потужність синхронних генераторів на електростанціях і тим самим зменшити втрати в лініях електропередачі. Однак у порівнянні з асинхронними двигунами синхронні двигуни є більш дорогими, головним чином, через витрати, пов'язані з виготовленням системи порушення. Синхронні двигуни також складніше асинхронних у конструктивнім відношенні, потребують кваліфікованого обслуговування й менш надійні в експлуатації.
. Це дозволяє зменшити реактивну потужність синхронних генераторів на електростанціях і тим самим зменшити втрати в лініях електропередачі. Однак у порівнянні з асинхронними двигунами синхронні двигуни є більш дорогими, головним чином, через витрати, пов'язані з виготовленням системи порушення. Синхронні двигуни також складніше асинхронних у конструктивнім відношенні, потребують кваліфікованого обслуговування й менш надійні в експлуатації.
Вибір того або іншого типу двигуна здійснюється на основі техніко-економічних розрахунків. При потужності 100-200 кВт синхронні двигуни часто виявляються вигідніше асинхронних.
|
|