Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Система источник тока - двигатель
|
|
Функциональная схема системы «источник тока – двигатель» приведена на рисунке 2.
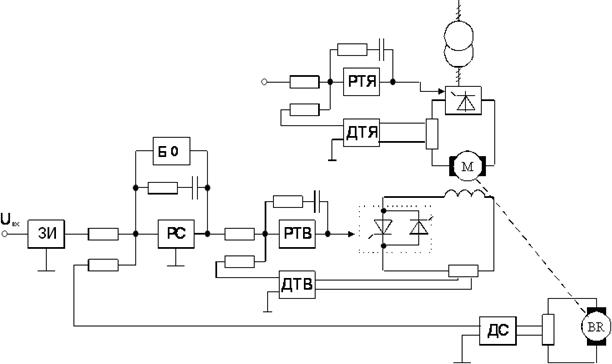
Рисунок 2 – Функциональная схема системы «источник тока – двигатель»
Данная схема содержит три контура: независимый контур регулирования тока якоря предназначенный для ограничения тока якоря в переходных режимах (колебания напряжения питания преобразователя, изменение скорости вращения и нагрузки) и стабилизации теплового режима работы двигателя; внутренний контур регулирования тока возбуждения предназначенный для ограничения тока возбуждения и момента двигателя и коррекции внешнего контура скорости; внешний контур регулирования скорости предназначенный для стабилизации скорости на задание рабочего цикла, формирования процессов пуска торможения, длительности включения, торможения.
Формирование пуско-тормозных режимов с помощью ЗИ – задатчика интенсивности.
Ограничение максимального момента – блок ограничения – регулятор скорости.
Реверс за счет смены полярности тока возбуждения.
Настройка системы:
1 КРТЯ (контур регулирования тока якоря) – выставляется UТ так, чтобы IЯ был близок к номиналу.
2 КРТВ (контур регулирования тока возбуждения).
3 Регулятор скорости
Блок ограничения - IВ выставляется на уровне максимально допустимого по режиму работы (нагрев и длительность перегрузки).
4 ЗИ (задатчик интенсивности) – формируется темп разгона и торможения.
Особенность системы:
- При изменении уставки тока якоря изменяются показатели качества регулирования скорости из-за изменения момента.
- Требуется перенастройка РС – регулятора скорости.
Преимущества:
1 Жесткое токоограничение. Практически исключена перегрузка двигателя. Система применяется в приводах механизмов с тяжелыми и особо тяжелыми условиями работы (экскаваторы, реверсивные прокатные станы).
2 Малая стоимость – реверсивный преобразователь ТПЯ рассчитывается на номинальную мощность двигателя.
В системах с управлением по якорю мощность ТПЯ завышается с учетом перегрузочной способности двигателя.
Недостатки:
1 Снижение КПД двигателя
Потери в якоре не зависят от нагрузки, при работе с ослабленным полем резко уменьшается КПД двигателя.
η ДВ = 
2 Показатели качества хуже, чем в системах с управлением по якорю за счет более инерционного управления.
Частота среза контура скорости снижается до уровня 5-10 рад/с. Возможен резонанс с механической частью.
В режиме ХХ во всем диапазоне регулирования поток стабилизируется на нулевом уровне.
В реальных системах минимальный поток соответствует потерям ХХ в двигателе и передаче.
ЭДС преобразователя в режиме ХХ компенсирует только падение напряжения в силовой цепи. ЭДС двигателя равно 0.
При работе под нагрузкой
кФ1 = 
И по мере роста скорости возрастает ЭДС преобразователя на величину ЭДС двигателя.
ЕДВ = кФ1ω
Если якорный преобразователь выходит в насыщение, то ток возбуждения увеличивается до максимального значения.
ЕПР = const
Предельные механические характеристики двигателей при различных системах управления приведены на рисунке 4.
Рисунок 4 – Предельные механические характеристики при различных системах управления: 1 – Схема подчиненного регулирования с управлением по якорю; 2 – Система «источник тока – двигатель»; 3 – Система двузонного регулирования
|
|