Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Лекция № 2. Структура систем управления преобразователями частоты
|
|
Цель лекции: изучить основные законы частотного управления и структуру схем, реализующих эти законы.
Частотное управление электродвигателями осуществляется двумя основными способами: по функциональной характеристике, связывающей напряжение и частоту статора электродвигателя - U/f - характеристике (скалярное управление) и векторным. Первый способ применяется для электроприводов, в которых отсутствуют особые требования к динамике. Второй способ применяется для электроприводов со средней и высокой динамикой.
При скалярном управлении в преобразователе частоты реализуется заданный закон частотного управления. Для идеализированного электродвигателя, в котором можно пренебречь активным сопротивлением статора, основной закон изменения напряжения при частотном регулировании был установлен М.П.Костенко / 1/ и выражается формулой
 ,
,
где МС1 и МС2 – моменты статической нагрузки, соответствующие работе двигателя при частотах f1 и f2;
U11, U12 - напряжение на двигателе при тех же частотах.
Если закон изменения момента заранее известен, то можно определить требуемое соотношение между напряжением и частотой на выходе инвертора.
При постоянстве момента статической нагрузки напряжение источника питания должно изменяться пропорционально его частоте. В этом случае для идеализированного двигателя сохраняется перегрузочная способность (Мк=const) и закон изменения напряжения примет вид:
U1/ f1 = const.
При постоянстве мощности на валу двигателя в процессе регулирования скорости закон изменения напряжения:
U1/  = const.
= const.
При вентиляторной нагрузке напряжение на статоре должно изменяться по закону:
U1/f12= const.
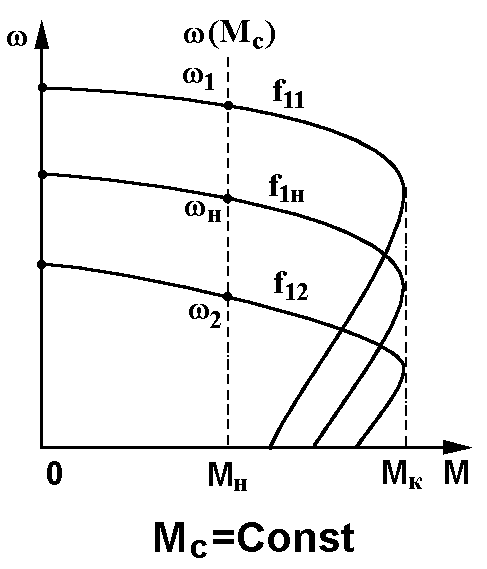
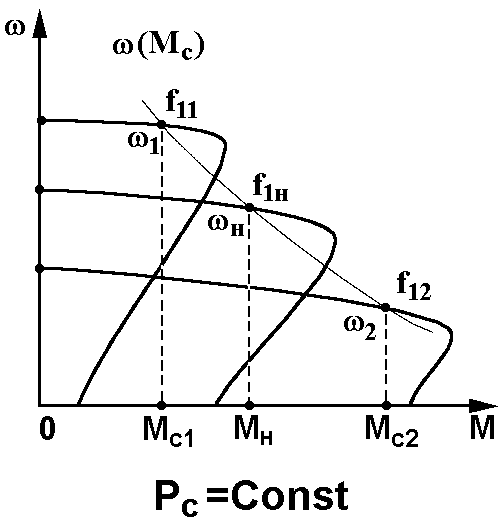
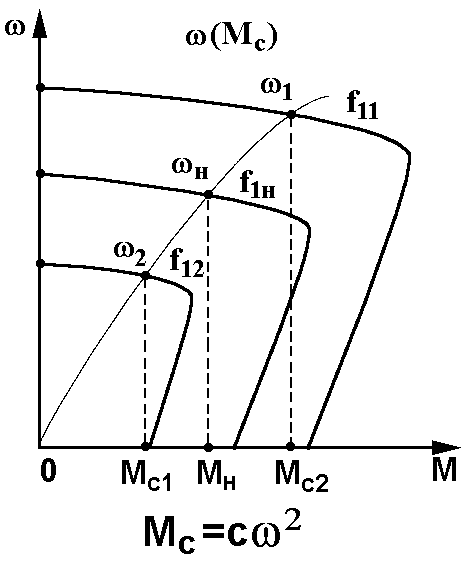
Механические характеристики для этих трех случаев представлены на рисунке 2.1
Рисунок 2.1
Перечисленные режимы управления достаточны для большинства применений. Вместе с тем для повышения качества управления приводом требуется использование других более совершенных методов управления. К ним относятся метод управления потокосцеплением (Flux Current Control – FCC) и метод бессенсорного векторного управления (Sensorless Vektor Control – SVC). Оба метода базируются на использовании адаптивной модели электродвигателя, которая строится с помощью специализированного вычислительного устройства, входящего в состав системы управления преобразователя.
Наиболее точное и эффективное управление обеспечивает режим векторного управления без датчика обратной связи по скорости (SVC). Если в двигателях постоянного тока имеются две обмотки (возбуждения и якорная), что позволяет управлять раздельно магнитным потоком (ток возбуждения) и электромагнитным моментом (ток якоря), то в двигателях переменного тока с короткозамкнутым ротором имеется всего лишь одна статорная обмотка, ток через которую формирует возбуждающее магнитное поле и определяет вращающий момент. С этим и связаны все трудности управления электродвигателем. Выход остается один: необходимо управлять амплитудой и фазой статорного тока, то есть его вектором. Однако для управления фазой тока, а значит, и фазой магнитного поля статора относительно вращающегося ротора необходимо знать точное положение ротора в любой момент времени. Эта задача может быть решена с использованием датчика положения, например, шифратора приращений. В такой конфигурации привод переменного тока по качеству регулирования становится сопоставимым с приводом постоянного тока. Но в составе большинства стандартных электродвигателей переменного тока встроенные датчики положения отсутствуют, поскольку их введение неизбежно ведет к усложнению конструкции двигателя и существенному повышению его стоимости.
Применение же современной технологии векторного управления позволяет обойти это ограничение путем использования математической адаптивной модели двигателя для предсказания положения ротора. При этом система управления должна с высокой точностью измерять значение выходных токов и напряжений, обеспечивать расчет параметров двигателя (сопротивление статора, значение индуктивности рассеяния и т.д.), точно моделировать тепловые характеристики двигателя, сообразовывать параметры двигателя с различными режимами его работы, осуществлять большой объем вычислений с очень высокой скоростью. Последнее обеспечивается применением в составе системы управления преобразователя специализированных интегральных схем ASIC (Applications Specific Integrated Circuit).
Векторное управление без датчиков обратной связи по скорости позволяет обеспечить динамические погрешности, характерные для регулируемого привода с замкнутой обратной связью. Однако полное управление моментом при скорости, близкой к нулевой, невозможно без обратной связи по скорости. Такая обратная связь становится необходимой и для достижения погрешности регулирования менее 1%. Контур обратной связи при этом легко реализуется с помощью самого преобразователя частоты.
Вместе с тем, режим векторного управления не может быть реализован для синхронных электродвигателей, для группы параллельно включенных двигателей, а также для двигателей номинальная мощность которых меньше половины мощности преобразователя частоты или превышает ее.
На рисунках. 2.1-2.6 приведены функциональные схемы систем управления электроприводами, в которых использованы описанные способы. Все модули функциональных схем реализуются программно на контроллере привода. В соответствии с этим имеется набор типовых программных модулей и программ связки модулей, обеспечивающих реализацию нужной системы управления.
Управление по U/f – характеристике может быть реализовано в системах управления одним или несколькими асинхронными электродвигателями без датчика обратной связи по скорости и с датчиком обратной связи по скорости. Наиболее простой является система управления, в которой отсутствуют датчики скорости (см. рисунок 2.1). Она применяется в приводах насосов, вентиляторов, в транспортных средствах при ограниченном диапазоне регулирования скорости (до 1: 10).
Для поддержания постоянства потокосцепления статора в соответствии с U/f -характеристикой применяются модули I/R -компенсации и Ud -коррекции. Повышение жесткости механической характеристики электропривода при изменении нагрузки достигается с помощью модуля компенсации скольжения (КС).
В системе управления предусматриваются выбор U/f -характеристики, соответствующей управлению механизмами, имеющими постоянную или вентиляторную нагрузку.
Для электроприводов механизмов, в которых диапазон регулирования скорости больше 1: 10, применяются системы регулирования с датчиками и регуляторами скорости
Векторное управление реализовано в системе управления асинхронным электродвигателем, функциональная схема которой показана на рисунке 2.2. В механизмах с большим диапазоном регулирования скорости применяется система управления с датчиком скорости. Динамические характеристики таких электроприводов аналогичны динамическим характеристикам электроприводов постоянного тока. Достигается это управлением составляющими Iω и Iµ вектора тока, первая из которых пропорциональна моменту двигателя, а вторая – потокосцеплению. Величины Iω и Iµ оцениваются по динамической модели двигателя, составленной представлением мгновенных значений переменных в виде результирующих векторов и переходом к вращающимся системам координат. В системе предусматривается возможность ограничивать момент двигателя в соответствии с заданным значением и управлять интенсивностью изменения момента.
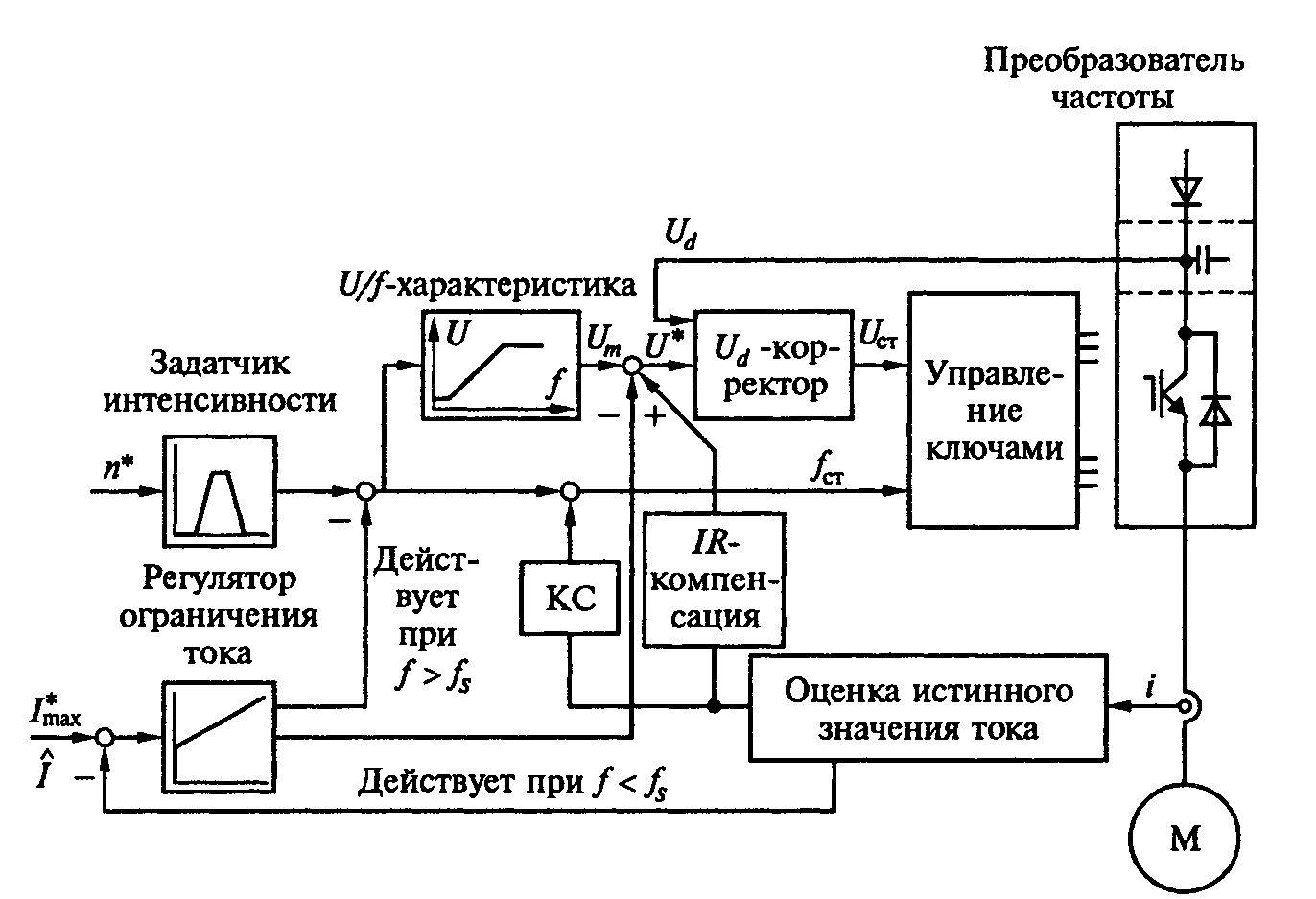
Рисунок 2.1
Вариант векторного управления электропривода без датчика скорости применяется в производственных механизмах при диапазоне регулирования скорости, не превышающем 1: 10 (например, в экструдерах и вентиляторах большой мощности, в транспортных и подъемных механизмах, центрифугах).
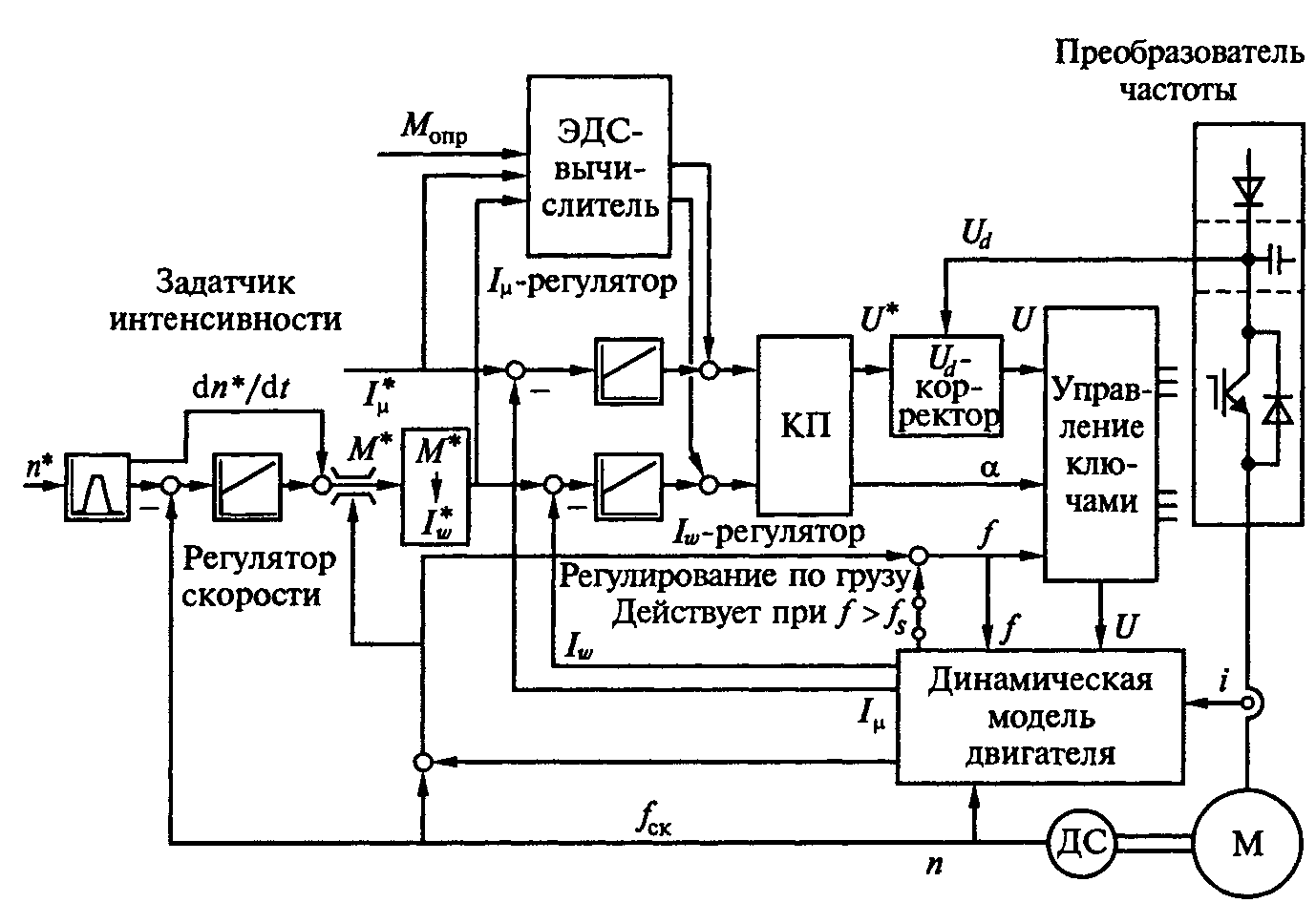
Рисунок 2.2
В частотно-регулируемых электроприводах фирмы АВВ используется технология прямого управления моментами (технология DTC). Она позволяет управлять двигателем без импульсного датчика скорости. В результате применения мощного цифрового сигнального процессора система быстро реагирует на изменения нагрузки, меняя момент на валу двигателя, чем повышается качество управления.
Вопросы:
1) В каких случаях применяется закон-U/ f2?
2) В каких случаях применяется закон- U/ f?
3) Какие физические принципы положены в основу векторного управления?
|
|