Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Мета роботи
|
|
Ознайомитися з характеристиками і принципом дії сучасних цифрових позиційних регуляторів. Дослідити експериментально можливості САР температури з позиційним регулятором.
2.2 Теоретичні відомості
Позиційні регулювальники забезпечують хорошу якість регулювання для об'єктів з малим запізнюванням, не вимагають налаштування і прості в експлуатації. Тому такі регулятори отримали широке застосування.
Регулювальники з позиційним (релейним) законом регулювання.
Структурна схема позиційної системи авторегулювання (САР) наведена на рис. 1.
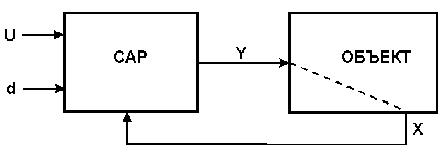
Рисунок 2.1 – Структурна схема САР:
U, d - вектора завдань і зон нечутливості;
X, Y - вектор регульованої величини і вихідний сигнал регулювання
Особливість таких регуляторів полягає в тому, що керуючий вплив (вихідний сигнал) приймає тільки кілька дискретних значень – позицій, тому їх називають позиційними. Даний тип регулятора ще називають Т-регулятором. Вони бувають з двопозиційним і трипозиційним законом регулювання.
Двопозиційні мають дискретну вихідну величину Y типа вкл./викл. (наприклад, включення/виключення нагрівача). Т-регулятора включає або вимикає вихідне реле залежно від того, досягла або не досягла регульована величина заданого значення.
Трипозиційні регулювальники мають дискретну вихідну величину Y з двома точками перемикання типа вкл./викл. і зоною нечутливості (наприклад, реверсивне управління сервоприводом) див. рис. 7, а.
Динамічні властивості об'єктів і вибір типа регулятора. Для визначення можливості використання Т-регулятора необхідно знати інерційність і час транспортного запізнювання регульованого об'єкту.
Для їх визначення на практиці найчастіше використовують методику зняття перехідної характерістіки, (див. лаб. работа №1).
Потрібний, щоб система знаходилася у спокої і були відсутні зовнішні обурення. На вхід виконавського органу подається ступінчаста дія 1(t) (рисунок 1.2)., внаслідок чого станом об'єкту є деякий процес X(t) – перехідну характеристику (див. на рисунку 2.2, а.).
Рисунок 2.2 – Обробка перехідної функції теплового об'єкта:
а) реальна крива; б) ідеалізована крива,
На рисунку 2.2 наведені позначення: τ – час транспортного запізнювання;
T – постійна часу (час узгодження) визначається інерційністю об'єкту; Xyст – стале значення; R – нахил розгінної кривої d x /d t (макс. швидкість зміни Х)
По вигляду цього перехідного процесу об'єкти регулювання можна підрозділити на декілька основних категорій:
- об'єкти з малою інерційністю і без запізнювання (T < 5 мін),
- об'єкти з інерційністю і з малим запізнюванням (τ / T < 0, 1).
Виходячи із співвідношення τ /T і вибирається тип регулятору. Слід пам’ятати, що Т-регулятори можна застосовувати тільки якщо τ / T < 0, 1. Позиційні регулятори не вимагають налаштування і забезпечують при цьому співвідношенні малий відхід від заданої температури.
Наприклад, вони використовуються для регулювання температури води в баках, в пастеризаторах, для управління нагрівом печі Ш2ХПА-25 хлібозаводу, в сушильних камерах ЖБК, в саунах і ін.
Алгоритм регулювання для позиційних регуляторів визначається статичною характеристикою регулювальника: залежністю вихідного сигналу Y від вхідного Х (див. рисунок 2.3).
Рисунок 2.3 – Статична характеристика двопозиційного регулятора
Вихідна величина Y дорівнює максимальній дії (нагрівач включений) при
X – Xзад < – δ, Y = 0 при X – Xзад > δ, де δ – поріг. Таку характеристику ще називають гістерезисною, а поріг спрацювання регулятора гістерезисом.
Процесом регулювання є коливання навколо заданого рівня (див. рисунок 2.5). Частота і амплітуда коливань визначаються величинами τ, R, T, δ. Однак якщо параметри коливань задовольняють технологічним і експлуатаційним обмеженням, то система вважається працездатною.
Для об'єктів з великою інерційністю T і з малим запізнюванням τ регулювання відбувається з постійними коливаннями до 5-15% від Uзад. Чим більше δ, τ / T, R, тим більше амплітуда коливань. Чим більше τ і T, тим більше період коливань.
Розглянемо як приклад структурну схему досліджуваної в даній лабораторній роботі схему САР температури з двохпозиційним регулятором (рисунок 2.4).
Рисунок 2.4 – Структурна схема САР температури з позиційним регулятором
Зображення об'єкта регулювання тут відповідає моделі, отриманої в роботі №1. Регулятор представлений статичною характеристикою двохпозиційного регулятора.
У вихідному стані температура об'єкта регулювання значно нижче заданої, сигнал неузгодженості має велике позитивне значення, тому на виході регулятора сигнал максимальний U і UMAX і температура починає швидко збільшуватися (рисунок 2.5).

Рисунок 2.5 – Характер зміни температури і напруги живлення печі
при роботі позиційного регулятора
Коли температура перевищить задане значення на величину δ, регулятор спрацьовує і на виході його встановиться мінімальне значення керуючого впливу U = UMIN. Однак, через запізнювання температура буде як і раніше збільшуватися і тільки через час τ почне зменшуватися.
Коли вона зменшиться нижче заданого на величину δ, регулятор знову спрацьовує і на виході установиться максимальне значення керуючого впливу U = UMАХ. Але зниження температури буде ще продовжуватися в інтервалі часу τ, після чого вона знову почне підвищуватися.
Таким чином, при використанні позиційного регулятора для керування об'єктом із запізнюванням виникають відхилення регульованого параметра від заданого значення Δ θ + і Δ θ – (див. рисунок 2.5). Для того, щоб оцінити величину цих відхилень будемо вважати, що після спрацьовування регулятора в моменти часу t 1, t 2,... протягом часу запізнювання τ, регульований параметр буде змінюватися з постійною швидкістю. Тоді величину відхилення можна визначити помноживши цю швидкість на час запізнювання. А формулу для обчислення швидкості зміни параметра можна одержати з диференціального рівняння інерційної ланки. У результаті одержимо такі залежності для розрахунку величини відхилень:
 ,
,
 (3.1)
(3.1)
де τ – час запізнювання об'єкта;
Т – постійна часу об'єкта;
θ ЗД – задане значення температури;
θ MAX, θ MIN – сталі значення температури, що відповідають UMAX, UMIN (визначаються по статичній характеристиці об'єкта).
На практиці використовують різні види позиційних регулювальників.
По вигляду статичної характеристики двопозиційні регулювальники можуть бути в основному наступних видів (див. рисунок 2.6).
Рисунок 2.6 – Види двопозиційних регуляторів
Статичну характеристику регулятора виду а) на практиці називають прямим гістерезисом і застосовують такі регулятори для вентиляції, в холодильниках та ін.
Статичну характеристику регулятора виду б) називають зворотнім гістерезиссом і зазвичай застосовують в різних нагрівальних приладах, термошкафах, баках і тому подібне.
Регулятори зі статичними характеристики видів в) і г) на практиці називають двопозиційним регулятором з П-подібною логікою і U-подібною логікою. Регулятори з такою логікою застосовують для сигналізації виходу системи на робочий режим.
Застосовуються також багатопозиційні регулятори.
Трипозиційні регулятори застосовуються для управління сервоприводом, а також для регулювання мікроклімату підігрівачем і вентилятором. Статична характеристика такого регулятора зображена на рисунку 2.7.
Чотирьохпозиційного регулювальника застосовують для поліпшення точності регулювання.
Рисунок 2.7 – Многопозиционные регуляторы:
а) трехпозиционный регулятор; б) четырехпозиционный регулятор
Вище було описано, що процесом регулювання є вагання довкола завдання (див. мал. 5). Частота і амплітуда визначаються величинами τ, R, Т, δ.
Для поліпшення процесу регулювання, тобто для зменшення відхилень Х від завдання U необхідно зменшувати транспортне запізнювання τ і інерційність Т системи регулювання. Це можна зробити, змінивши конструкцію об'єкту регулювання або відповідним чином розмістивши датчик (наприклад поблизу нагрівача).
За інших рівних умов, чим більше XMAX – максимально-можливе значення регульованої величини, тим більше коливання в позиційних регуляторах. Це значення слід встановити по можливості рівним верхньому кордону діапазону регулювання.
Ці ж міркування також відносяться і до нижнього кордону діапазону. Тобто встановивши постійний нагрівач і підключивши підігрівач до регулювальника можна істотно поліпшити характеристики САР.
Якщо, проте, потрібний широкий діапазон регулювання, можна застосувати чотирьохпозиційного регулювальника, підключивши до нього два елементи, один з яких в два рази потужніше за інше.
На практиці широко виконують багатоканальними позиційні регулятори (дво-, чотири-, восьмиканальними, …). Такі прилади можуть працювати в декількох режимах.
Наприклад двоканальний двопозиційний регулятор може працювати в режимах: 1) незалежне керування двома об’єктами (рисунок 2.8, а); 2) регулювання виходячи з різниці двох вхідних (виміряних) параметрів (рисунок 2.8, б); 3) робота в режимі трипозиційного одноканального регулятора (рисунок 2.8, в).
Рисунок 2.8 – Різні можливості використання двох входів X 1, X 2 і виходів Y 1, Y 2
двоканальних цифрових позиційних регуляторів
Тому для утворення багатопозиційних регуляторів слід шукати багатоканальні двопозиційні регулятори.
Недоліком позиційних регуляторів є те, що вони практично непридатні для систем зі значним транспортним запізнюванням τ > 0, 2× Т і для об'єктів без самовиравніванія, оскільки регульована величина далеко виходить за необхідні межі регулювання. У таких випадках застосовують регулятори з пропорционально-інтегрально-діфференциальним (ПІД) законом. Однак позиційнірегулятори дозволяють для об'єктів з великою інерційністю Т і з малим запізнюванням τ < 0, 2× Т забезпечити хорошу якість регулювання: X – Xзад < < 1% від Xзад, досить малий час виходу на режим і невисоку чутливість до обурень.
2.3 Опис експериментальної установки
Схема досліджуваної САР з позиційним регулятором зображена на рисунку 2.9. Основними елементами регулятора є реле К вбудоване в автоматичний регулятор «PLAST+1000C». Введення температури стабілізації та гістерезису виконується за допомогою кнопок на лицьовій панелі.

Рисунок 2.9 – Схема для визначення характеристик об'єкта регулювання
У початковий момент часу, коли температура нижче заданої, контакт реле регулятора К замкнений. При цьому через обмотку реле К1 і лампочку Л2 йде струм. Реле К1 своїм нормально розімкнутим контактом К1.1 підключає піч до мережі 220 В. Таким чином, у вихідному стані горить лампочка Л2 і піч нагрівається.
Коли температура печі досягає заданого значення реле К регулятора відключається. У результаті обмотка реле К1 і лампочка Л2 відключаються від мережі. Контакт К1.1 повертається в нормальний (розімкнутий) стан і піч відключається від мережі 220 В.
Тому що об'єкт регулювання має запізнювання, то після відключення від мережі піч буде продовжувати нагріватися і лише через час транспортного запізнювання почне охолоджуватися. Коли температура знизиться нижче заданої гістерезисом, реле К регулятора знову замкнеться, спрацює реле К1 і спалахне лампочка Л2. Контакт К1.1 замкнеться і піч знову почне нагріватися.
Збурюючий вплів на систему можливо втілити за допомогою включення вимикачем SA2 двигуна з вентилятором охолодження печі опору.
Збурюючий вплів на систему по ланцюгу живлення можливо втілити за допомогою зміни вхідної напруги ЛАТРом TV1.
На рисунках 2.10-2.11 показана інструкція до двопозиційного регулятора.
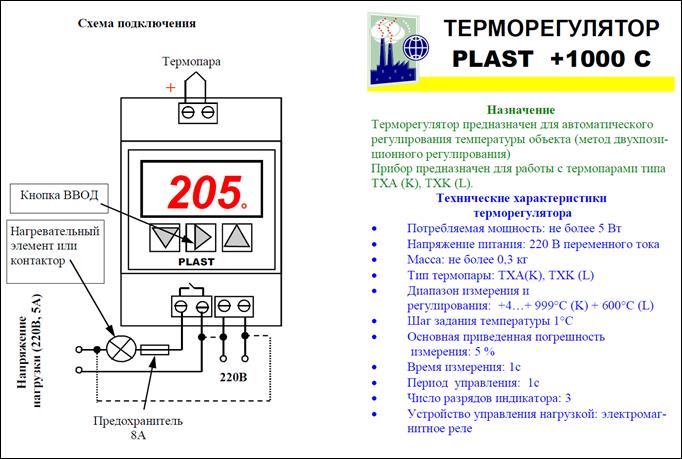
Рисунок 2.10 – Інструкція до двопозиційного регулятора сторінка 1
|
|