Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Умови рівноваги систем сил
|
|
Головним вектором системи сил називають векторну суму сил системи. Головним моментом системи сил відносно деякої точки називають векторну суму моментів сил системи відносно цієї точки:
 ;
;  . (2.1)
. (2.1)
Для рівноваги будь-якої системи сил необхідно й достатньо, щоб головний вектор і головний момент системи сил відносно деякої точки  дорівнювали нулеві:
дорівнювали нулеві:
 ;
;  . (2.2)
. (2.2)
Аналітичні умови рівноваги просторової системи сил в координатній формі мають вигляд:
 ;
;  ;
;  ;
;
(2.3)
 ;
;  ;
;  .
.
Аналітичні умови рівноваги збіжної системи сил (системи сил, лінії дії яких перетинаються в одній точці) мають вигляд:
 ;
;  ; . (2.4)
; . (2.4)
Аналітичні умови рівноваги плоскої системи сил (системи сил, які знаходяться в одній площині, наприклад,  ) мають вигляд
) мають вигляд
;  ;
;  , (2.5)
, (2.5)
або
 ;
;  ;
;  , (2.6)
, (2.6)
де точки  не лежать на одній прямій, або
не лежать на одній прямій, або
 ; ; , (2.7)
; ; , (2.7)
де вісь  не перпендикулярна до лінії
не перпендикулярна до лінії  .
.
Аналітичні умови рівноваги системи паралельних сил (системи сил, які паралельні, наприклад, осі  ) мають вигляд:
) мають вигляд:
 ;
;  ;
;  . (2.8)
. (2.8)
Умовам рівноваги (2.4) можна надати інший зміст, якщо врахувати, що збіжна система сил еквівалентна одній силі – рівнодійній  . Таким чином, умову рівноваги збіжної системи сил можна записати у вигляді:
. Таким чином, умову рівноваги збіжної системи сил можна записати у вигляді:
 . (2.9)
. (2.9)
Вираз (2.9) означає, що багатокутник збіжних сил за умови рівноваги є замкненим. За графічним методом розв’язання задачі напрями і модулі невідомих сил визначаються з аналізу замкненого багатокутника сил.
Аналітичний метод розв’язання задачі пов’язаний з проектуванням сил на осі. Проекція сили  (рис. 2.1, а) на вісь з ортом
(рис. 2.1, а) на вісь з ортом  визначається таким чином:
визначається таким чином:
 . (2.10)
. (2.10)
Для визначення кута  між силою та віссю їх необхідно перенести в одну точку. Якщо не заданий кут між силою і віссю, а відомим є кут
між силою та віссю їх необхідно перенести в одну точку. Якщо не заданий кут між силою і віссю, а відомим є кут  між прямими, вздовж яких напрямлені сила та вісь (рис. 2.1, б; 2.1, в), то проекція сили на вісь дорівнює:
між прямими, вздовж яких напрямлені сила та вісь (рис. 2.1, б; 2.1, в), то проекція сили на вісь дорівнює:
 . (2.11)
. (2.11)
Проекція сили на вісь є від’ємною, коли кут між силою й віссю є тупим. Тому проектування сили на вісь можна спростити, якщо поступати таким чином. У випадках, яким відповідають рис. 2.1, б; 2.1, в, знак проекції визначається безпосередньо з рисунка, це “мінус”, а модуль сили множиться на  , тобто відразу записують
, тобто відразу записують
 .
.
х
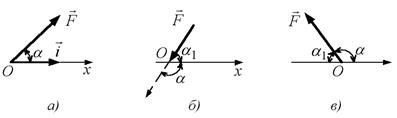
Рис. 2.1
Проекція сили на вісь дорівнює нулеві, коли  , тобто вектор і вісь взаємно перпендикулярні.
, тобто вектор і вісь взаємно перпендикулярні.
У більш загальному випадку проекції сили на осі 

 (рис. 2.2, а) визначають наступним чином:
(рис. 2.2, а) визначають наступним чином:
 (2.12)
(2.12)
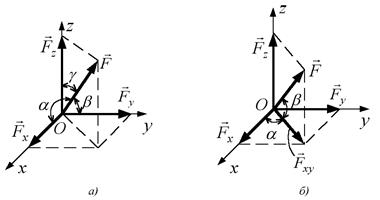
Рис. 2.2
Якщо положення вектора сили задається так, як показано на рис. 2.2, б (кут  заданий в площині, що перпендикулярна до площини
заданий в площині, що перпендикулярна до площини  , то проекції сили на осі мають вигляд
, то проекції сили на осі мають вигляд

 (2.13)
(2.13)

 Тобто у разі проектування сили на осі
Тобто у разі проектування сили на осі  та
та  силу спочатку проектують на площину , отримують вектор
силу спочатку проектують на площину , отримують вектор  , далі цей вектор проектують на осі і в площині .
, далі цей вектор проектують на осі і в площині .
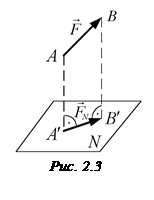
Проекцією вектора на площину  (рис. 2.3) є вектор
(рис. 2.3) є вектор  (тобто
(тобто  ), початком і кінцем якого відповідно є проекції на площину початку і кінця вектора .
), початком і кінцем якого відповідно є проекції на площину початку і кінця вектора .
|
|