Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Общие принципы построения систем управления ЭП. Схема подчиненного регулирования.
|
|
Системы управления: 1неавтоматические – все управление осуществляется оператором; 2.автоматические – оператор дает команду на начало и конец процесса, внутри процесса обеспечивается СУ.
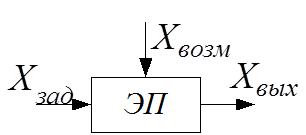 1 Разомкнутые – системы в которых изменение внешних возмущений отражаются на изменении выходной координаты.
1 Разомкнутые – системы в которых изменение внешних возмущений отражаются на изменении выходной координаты.
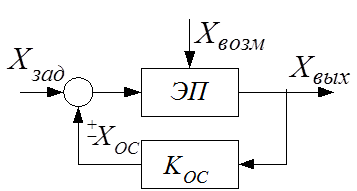 2 Замкнутые – системы в которых влияние возмущающего воздействия на выходную координату частично или полностью устранены. Это можно достичь использую системы с обратной связью по главной координате.
2 Замкнутые – системы в которых влияние возмущающего воздействия на выходную координату частично или полностью устранены. Это можно достичь использую системы с обратной связью по главной координате.
Схема подчиненного регулирования параметров:
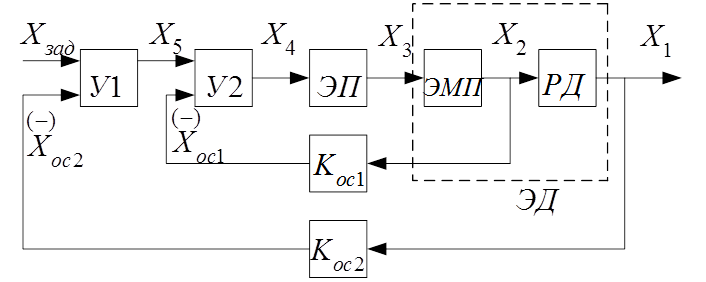 В данной структуре количество регулируемых координат равно количеству замкнутых контуров и количеству усилителей. Замкнутые контура располагаются таким образом, что выходной сигнал внешнего контура X5 является задающим сигналом внутреннего, т.е. каждый внутренний контур подчинен внешнему.
В данной структуре количество регулируемых координат равно количеству замкнутых контуров и количеству усилителей. Замкнутые контура располагаются таким образом, что выходной сигнал внешнего контура X5 является задающим сигналом внутреннего, т.е. каждый внутренний контур подчинен внешнему.
Такие системы позволяют осуществлять раздельное регулирование координат ЭП, осуществлять раздельную оптимальную настройку в качестве процесса регулирования.
13.Естест-е мех. и эл.мех. хар-ки ДПТ НВ (принц-я схема ДПТ НВ, основные соотношения, харак-ки в четырёх квадрантах)
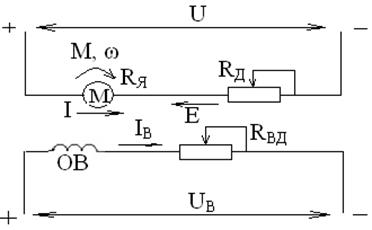
Принц-я схема ДПТ НВ:
 В основе работы двигателя лежат 3 закона:
В основе работы двигателя лежат 3 закона:
1.Закон эл/магнитной индукции Е=k∙ Ф∙ ω (1)
2.Закон эл/магнитных сил
M= k∙ Ф∙ I (2)
3.Закон эл/магнитного равновесия (2й закон Кирхгофа) U=E+I∙ R (3) - напряжение, подводимое к двигателю, уравновешивается противоЭДС и падение напряжения в якорной цепи.
 Так как при изменение напряжения на якоре значение скорости
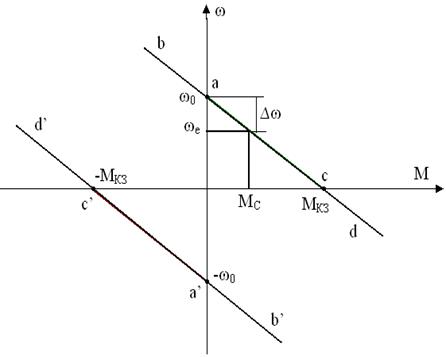
Так как при изменение напряжения на якоре значение скорости  0 (хол. ход) и Мкз по модулю остаются неизменным, сл-о хар-ки симметричны относительно начало координат. У данного типа двигателя с учётом постоянного магнитного потока момент и ток связанны линейно. Поэтому графическое изображение мех-ой и эл/мех-ой характеристики будут отличаться друг от друга лишь масштабом по оси Х.
0 (хол. ход) и Мкз по модулю остаются неизменным, сл-о хар-ки симметричны относительно начало координат. У данного типа двигателя с учётом постоянного магнитного потока момент и ток связанны линейно. Поэтому графическое изображение мех-ой и эл/мех-ой характеристики будут отличаться друг от друга лишь масштабом по оси Х.
а, а/- точки идеального холостого хода, с и Мс-скорость нагрузки и момент нагрузки,  - перепад скорости под действием нагрузки, для положительного направления вращения (1 квадрант). Ас-двигательный режим работы, сd- торможение противовключением, аb- рекуперативное торможение, для отрицательного направления вращения (3 квадрант), а/с/=ас, с/d/=сd, а/b/=аb
- перепад скорости под действием нагрузки, для положительного направления вращения (1 квадрант). Ас-двигательный режим работы, сd- торможение противовключением, аb- рекуперативное торможение, для отрицательного направления вращения (3 квадрант), а/с/=ас, с/d/=сd, а/b/=аb
14. Искусственные мех-е и эл/мех-е характеристики ДПТ НВ при реостатном регулировании скорости.(схема, основ соотно)
 Проведем анализ характеристик по 2 точкам:
Проведем анализ характеристик по 2 точкам:
1.Скорость идеал. хол. хода (ω 0)
2.Режим к.з
- Т.к 0=U/c не зависит от сопротивления в якорной цепи, то все харак-и на оси Y проходят через одну и туже точку 0
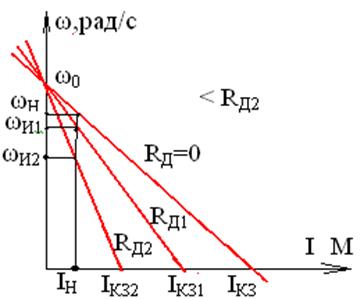
- Т.к статическая ошибка  то есть прямопропорцион-а сопротивлению в якорной цепи. След-но жесткость характеристик изменяется с изменением сопротивления, и чем больше сопро-е, тем меньше жесткость.
то есть прямопропорцион-а сопротивлению в якорной цепи. След-но жесткость характеристик изменяется с изменением сопротивления, и чем больше сопро-е, тем меньше жесткость.
- Ток к.з, и момент будет уменьшатся с увеличением Rд 
- С увеличением сопротивления в цепи якоря частота вращения дв-я под нагрузкой будет уменьшаться в двигательном режиме  и увеличиваться в генераторном.
и увеличиваться в генераторном.
15. Искусственные мех-е и эле/мех-е характеристики ДПТ НВ при изменении магнитного потока

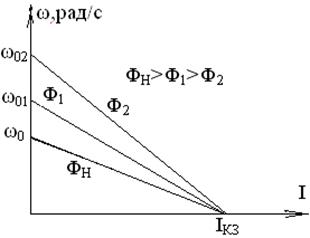
На основание этого можно сказать, что мех-я и элек/мех-я характ-и не будут совпадать.
1 Элек/мех-е характери-и:
Величина скорости идеального х.х при уменьшение потока возврастает. Ток к.з от потока не зависит, в данном случае выше естественной, т.е регулирование во 2 зоне
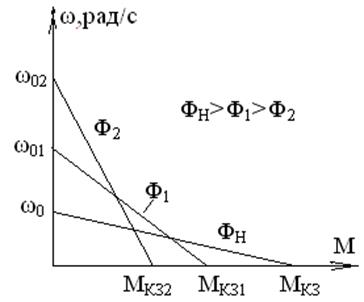
2 Мех/ие хар-и:
Зависит от потока, т.е с уменьшением потока момент уменьшаеться.
16. Искусственные мех-е и элек/мех-е характеристики ДПТ НВ при изменении питающего напряжения.

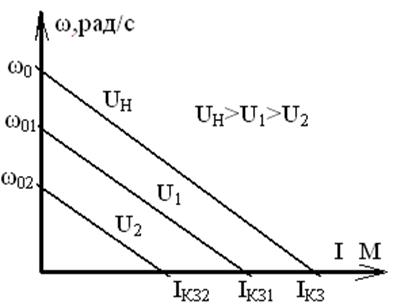 |
Наклон харктер-и определяет величина сопротивления. Величина сопротивления не зависит от питающего напряжения, т.к скорость идеального холостого хода и тока к.з оба в одинаковой степни прямопроп-но зависит от напряжения питания, то все характер-и будут параллельны друг другу.
|
|