Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Управління формоутворенням деталей у слідкуючому приводі технологічного обладнання
|
|
Заключний етап (третя фаза) реалізації геометричної задачі полягає у відпрацюванні керуючих дискрет слідкуючими приводами подачі в формоутворюючій системі координат верстата. На рис. 6.29 представлена схема слідкуючого приводу, що є узагальненням достатньо довільної структури слідкуючих приводів, які застосовуються у пристроях ЧПУ.
Абсолютна задана координата x абс утворюється у накопичувачі абсолютної координати із врахуванням чергового завдання на відпрацьовування D x та встановленої дискретності слідкуючого приводу технологічного обладнання. Датчик зворотного зв’язку по положенню передає пряму (аналогову) інформацію про пересування виконавчого органу до аналогово-цифрового перетворювача (АЦП) для приймання і обробки сигналу в пристрої ЧПУ. Абсолютна фактична координата виконавчого органу x факт утворюється на підставі цих даних з АЦП та із врахуванням дискретності слідкуючого приводу.
Управління слідкуючим приводом здійснюється на підставі визначення різниці D значень абсолютних координат у блоці неузгодженості, перетворення цього кодового значення в аналоговий сигнал D y, який і буде відпрацьований приводом подачі виконавчого органу до тих пір, поки неузгодженість D не стане нульовою. В результаті слідкуючий привід буде приведений у рух і після пересування виконавчого органу на величину D x датчик зворотного зв’язку по положенню зафіксує це у відповідному сигналі, і слідкуючий привід зупиниться.

Рис. 6.29. Відпрацювання керуючих дискрет слідкуючими приводами подачі
Однак, крім виконання основної функції по управлінню формоутворенням деталей, слідкуючий привід подачі виконує ще й такі функції контролю:
– корекція систематичних похибок верстата;
– компенсація сталої похибки слідкуючого приводу;
– усунення перехідних динамічних похибок у каналі зворотного зв’язку.
Маючи на увазі те, що реалізація цих функцій здійснюється в системі ЧПУ програмно, умовна структурна схема блоку управління виконавчими слідкуючими приводами подачі зображена на рис. 6.30. Блок складається з таких компонентів: блока корекції систематичних похибок позиціонування; блока масиву констант та корекцій систематичних похибок; блока послідовної корекції, порівняльного пристрою.

Рис. 6.30. Структурна схема блоку управління
виконавчими слідкуючими приводами подачі
Інтерполятор працює на постійній несучій частоті й у кожному періоді виробляє керуючий сигнал D x (для координати X), що надходить у вигляді x абс на вхід порівняльного блоку для порівняння його із сигналом зворотного зв’язку у вигляді скоригованого x факт. Неузгодженість через блок послідовної корекції та аналого-цифровий перетворювач керує регульованим приводом, а сигнал зворотного зв’язку після проходження через аналого-цифровий перетворювач і блок корекції систематичних похибок повертається до порівняльного блоку.
Корекція систематичних похибок верстата. Систематична похибка виникає внаслідок механічних зазорів і допусків у виконавчих механізмах приводів подачі верстата (зазори в кулькових парах “гвинт – гайка”, опорних парах). Ідея корекції полягає в тому, що повне переміщення вздовж координатної осі розбите на інтервали D і для кожної k -ої точки на межі сусідніх інтервалів з визначеним значенням абсолютної координати x кор заздалегідь встановлена необхідна корекція d k. Усі корекції зберігаються в масиві констант і корекцій.
Необхідність корекції виникає тоді, коли задана фактична абсолютна координата x абс виконавчого органу збігається з абсолютною координатою чергової точки корекції. Це відбувається, коли пройдений від попередньої точки корекції шлях D s перевищує D.
Алгоритм корекції систематичних похибок показаний на рис. 6.31. За необхідності врахування впливу на похибку, що обумовлений змінним напрямком руху, в алгоритм додають такі процедури: визначення моменту зміни напрямку руху виконавчого органу, визначення знака зміни напрямку (з додатного напрямку на від’ємний чи навпаки), компенсації зазору.
Компенсація сталої похибки слідкуючого приводу. Стала швидкісна похибка слідкуючого приводу не залежить від запрограмованого шляху. Вона тим менша, чим більший коефіцієнт підсилення по швидкості. При постійній швидкості подачі стала швидкісна похибка постійна.
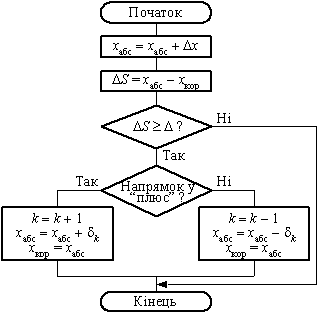
Рис. 6.31. Алгоритм корекції систематичної похибки
У зв’язку з цим компенсація сталої похибки можлива шляхом введення в контур управління через блок послідовної корекції додаткового сигналу D v, пропорційного заданій швидкості  (для координати X), де Т – період постійної несучої частоти:
(для координати X), де Т – період постійної несучої частоти:
 ,
,
де k 1 і k 2 – коефіцієнти пропорційності.
З формули видно, що компенсуючий сигнал формується шляхом множення результату інтерполяційних розрахунків на постійний коефіцієнт, який може бути заданий з панелі оператора, у тексті управляючої програми, у масиві констант або отриманий шляхом розрахунків.
Усунення перехідних динамічних похибок. Помітним джерелом динамічних перехідних похибок є стрибкоподібні зміни неузгодженості приводу. Причина такої зміни пов’язана з роботою блока корекції систематичних похибок позиціонування, що миттєво змінює значення сигналу, який надходить з перетворювача зворотного зв’язку по положенню, при проходженні виконавчого органу через точку корекції. Різка зміна значення сигналу зворотного зв’язку викликає відповідний стрибок неузгодженості слідкуючого приводу. Це збуджує динамічний перехідний процес, що також впливає на неузгодженість, тобто динамічну похибку слідкуючого приводу.
Усунення подібних динамічних похибок здійснюють за допомогою спеціального алгоритму плавної ліквідації неузгодженостей, що стрибкоподібно змінюються. Цей алгоритм доцільно розмістити в блоці послідовної корекції. В основі алгоритму лежить наступна стратегія: найбільш сприятливим, з динамічної точки зору, є управління, при якому значення двох послідовно виданих на регульований привід неузгодженостей розрізняються на величину, що не перевищує 5% значення найбільшої неузгодженості.
Алгоритм усунення для координати Х наведений на рис. 6.32.
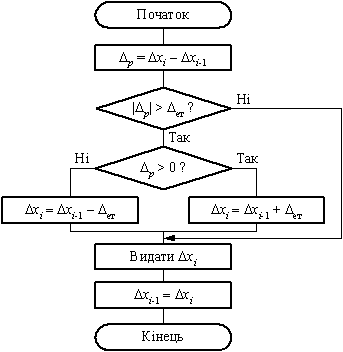
Рис. 6.32. Алгоритм усунення динамічних перехідних похибок
Зміст алгоритму складають такі процедури: визначення значення і знака різниці D р неузгодженостей у сусідніх періодах: i -му і (i – 1)-му; порівняння отриманої різниці з еталоном Dет; корекція неузгодженості в i -му періоді, якщо різниця перевищує еталон, видача неузгодженості в аналого-цифровий перетворювач.
|
|