Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Види інтерполяції в пристроях ЧПУ
|
|
Інформація робочого кадру при програмуванні формоутворення деталі носить узагальнений характер. Вона узагальнено описує геометричну задачу (тобто ту траєкторію, яку необхідно відтворити), але нічого не говорить про засоби рішення (тобто про те, якими повинні бути команди, що оперативно видаються на слідкуючі приводи подачі).
Обчислювальну процедуру пристрою ЧПУ, що забезпечує перехід від загального опису заданого переміщення до оперативних команд у функції часу для виконавчих приводів, називають інтерполяцією, а блок, який реалізує цю процедуру – інтерполятором.
Інтерполяцію здійснюють над цілими числами, кожна одиниця яких відповідає найменшому переміщенню чи куту повороту робочого органу верстата, який може бути проконтрольований у процесі управління. Таку відповідність трактують як дискретність переміщення.
Оскільки контроль переміщення на верстаті вздовж кожної координатної осі виконує датчик зворотного зв’язку по положенню слідкуючого приводу подачі, то і дискретність переміщення визначається ціною розбиття шкали цього датчика.
Нехай, наприклад, дискретність переміщення деякої системи ЧПУ складає 1 мкм. Це означає, що ціна слідкуючого приводу подачі дорівнює 1 мкм. Тоді задане у деякому кадрі переміщення, підготовлене для інтерполяції, повинно бути подане цілим числом мікрометрів. У загальному випадку задане переміщення на рівні робочого кадру подається цілим числом дискрет. Таким чином, під дискретою можна розуміти і керуючу команду, яка надходить на вхід слідкуючого приводу подачі. Слідкуючий привод подачі відпрацьовує кожну дискрету відповідно до її ціни, тобто у вигляді деякого елементарного переміщення.
При дискретності у 1 мкм переміщення Х375. Y160. еквівалентне переміщенню, що інтерполюється, по осі Х на 375000 дискрет і по Y – на 160000 дискрет.
Процедура інтерполяції обслуговує той кадр управляючої програми, який на даний момент є робочим. Інтерполяційні обчислювальні цикли відтворюються з високою частотою для того, щоб одержати інформацію, необхідну для управління слідкуючими приводами подачі з метою руху по заданій траєкторії. Для цього потрібні великі витрати обчислювальної потужності пристою ЧПУ. У зв’язку з цим існує декілька видів інтерполяції, що застосовуються у пристроях ЧПУ в залежності від виду елементарних ділянок руху: лінійна, кругова інтерполяція, а також від принципу видачі керуючих дискрет на координатні приводи подачі: рівномірна інтерполяція, інтерполяція з ведучою і веденою координатами, інтерполяція на постійній несучій частоті.
На рис. 6.14 наведені циклограми початкового і завершуючого етапів відпрацювання кадру при різних видах лінійної інтерполяції.
Виходячи з заданої у кадрі швидкості подачі V, нескладно розрахувати час повного відпрацювання кадру при лінійній інтерполяції:
 ,
,
де X, Y – кадрові прирости координат по відповідних осях;
V – контурна швідкість подачі.
Лінійна рівномірна інтерполяція могла б складатись із рівномірної видачі за цей час керуючих дискрет у координатні приводи подачі Х і Y. Періоди видачі дискрет Tx, Ty для кожної координати розраховуються окремо, тому й обчислювальний цикл (період) інтерполяції T є змінним за час відпрацювання кадру:
 ;
;  .
.
Тому, з метою економії витрат обчислювальної потужності процес інтерполяції вигідніше будувати за принципом управління за ведучою та веденою координатами.
Координату, по якій виконується найбільше переміщення, називають ведучою, а всі інші – веденими. Управляючі дискрети формують так, щоб вони поступали у привід подачі ведучої координати насправді рівномірно. Для ведених координат видача управляючих дискрет на приводи подачі дозволена лише у моменти часу, які визначені дискретами ведучої координати (рис. 6.14, б). Це призводить, як правило, до деякого запізнення у часі видачі дискрет відомої координати, тобто теоретично буде присутнє деяке відхилення від заданої прямої лінії, яке не перевищує ціни однієї дискрети. Перевага ж цього принципу у тому, що обчислювальний цикл інтерполяції T = min { Tx, Ty } завершується одночасною видачею керуючих команд для приводів подачі усіх координат.
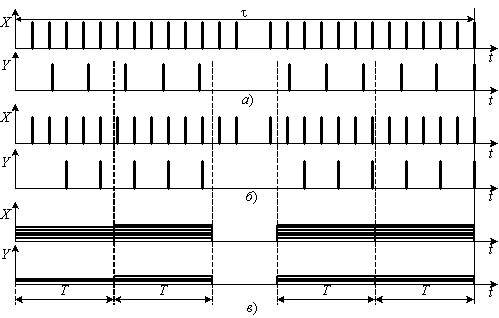
Рис. 6.14. Види лінійної інтерполяції:
а – рівномірна видача управляючих дискрет у приводи подачі координат Х, Y; б – інтерполяція з використанням принципу управління за ведучою та веденою координатами; в – інтерполяція на постійній несучій частоті
Практично інтерполяцію організовують наступним чином. В результаті чергового обчислювального циклу, який виконується із максимально високою швидкістю у машинному масштабі часу, визначають, у які приводи подачі повинні бути видані дискрети на поточному етапі управління. Результат зберігають у буфері, який опитують з частотою, що відповідає швидкості подачі для ведучої координати. Таким чином, розрахунки машинного масштабу прив’язують до реального часу, розвиток подій у якому визначається виходячи з технологічних міркувань. Проте, значення періоду інтерполяції залишається фіксованим тільки протягом опрацювання поточного кадру. При переході до наступного кадру цю величину необхідно перерахувати, і вона може бути змінена. З метою покращення роботи інтерполятора пристрою ЧПУ краще було б забезпечити постійних період інтерполяції протягом виконання всієї управляючої програми.
Тому можлива інша принципіальна схема інтерполяції – на постійній несучій частоті (рис. 6.14, в). У кожному періоді постійної частоти і для кожної координати окремо розраховують число дискрет, які у цьому періоді повинні бути відпрацьовані на підставі швидкості подачі приводу даної кординати:
 ;
;  .
.
Результати розрахунків, скоріш за все, виявляться дробовими, хоча при управлінні дробова частина від дискрети фізичного сенсу немає. Просте перетворення до найближчого цілого призвело б до накопичення помилок, тобто до відхилення від заданої траєкторії. Тому пачки дискрет, підготовлені до видачі у приводи подачі у поточному періоді постійної частоти, перетворюють до цілих чисел, а дробові залишки накопичують та враховують у наступних періодах. У зв’язку з цим картина видачі пачок у приводи від періоду до періоду нерівномірна, проте період інтерполяції T залишається незмінним для всіх управляючих програм ЧПУ.
Розрахунки, пов’язані з круговою інтерполяцією, суттєво складніші. Цілком зрозуміло, що при круговій інтерполяції частоти видачі управляючих дискрет повинні бути суттєво нерівномірними (рис. 6.15).

Рис. 6.15. Види кругової інтерполяції:
а – незалежна поява управляючих дискет на входах слідкуючих приводів подачі по координатах Х, Y; б – інтерполяція з використанням принципу управління за ведучою та веденою координатами; в – інтерполяція на постійній несучій частоті
Якісна картина появи управляючих дискрет на входах слідкуючих приводів подачі по координатах Х і Y при незалежній їх видачі та відпрацюванні показана на рис. 6.15, а.
При круговій інтерполяції з використанням принципу управління за ведучою та веденими координатами необхідно відмітити таку особливість її реалізації: ведуча та ведена координати, починаючи з деякого моменту часу, міняються ролями (рис. 6.15, б). До моменту t 1ведучою є координата Х, і саме на дискрети цієї координати налагоджені інтерполяційні цикли, а по проходженню цього моменту ведучою стає координата Y, і вже вона починає визначати моменти часу видачі управляючих дискрет. Цей момент часу t 1визначається тим фактом, що приріст ведучої координати при відпрацюванні дискрет дорівнює приросту веденої координати.
Взагалі при обході кола ведуча і ведена координати почергово змінюються. Якщо дискретність переміщення по координатах однакова для верстата, то площина кола поділяється лініями, проведеними під кутом 45° до координатних осей, на сектори, де діють як ведучі різні координати (рис. 6.16).

Рис. 6.16. Сектори розподілу ведучої координати при круговій інтерполяції
Кругова інтерполяція на постійній частоті продемонстрована на циклограмах, зображених на рис. 6.15, в. Об’єми пачок управляючих дискрет, що визначаються інтерполяційними розрахунками у сусідніх періодах, можуть значно відрізнятись.
Як і при лінійній інтерполяції, інтерполяційні розрахунки машинного масштабу часу відокремлені від процесу видачі управляючих дискрет на приводи подачі. Видача робиться за результатами опитування буфера з частотою, що визначається швидкістю контурної подачі. Отже, інтерполяційний процес є сукупністю обчислювальних циклів, які неперервно повторюються до повної обробки усієї інформації кадру і завершуються визначенням комбінацій, видаваємих на приводи подачі управляючих дискрет або пачок управляючих дискрет.
Одними з головних переваг верстатів з ЧПУ є підвищення та стабільність якості обробки (точність розмірів і форми оброблюваної деталі, шорсткість оброблених поверхонь), що забезпечують ідентичність деталей всієї партії. Представляє інтерес вплив пристроїв ЧПУ на точність обробки в результаті таких факторів, як вид інтерполяції, дискретність, величина і форма траєкторії контуру, що відпрацьовується, тощо.
При лінійній інтерполяції контуру похибка переміщення інструмента відносно заготовки залежить від кута нахилу лінійного контуру (рис. 6.17). Найбільша похибка в одну дискрету буде при найменшому куті нахилу контуру 1: 10. При круговій інтерполяції контуру, утвореного з дуг кола, відхилення по радіусу може досягати двох дискрет. Відхилення реального контуру внаслідок згладжуючої дії кінцевої фрези буде менше однієї дискрети. Таким чином, величина дискрети і є найменшою величиною відхилення (похибки) за відсутності складових похибки від інших факторів (теплові деформації, знос інструмента і механічних частин верстата тощо).
Величина дискрети в сучасних верстатах з ЧПУ складає 10, 5, 2 і 1 мкм.

Рис.6.17. Похибки інтерполяції
Для технологічно складних задач у процес інтерполяції може бути включено до п’яти керованих координат. П’ятикоординатне формоутворення зустрічається при обробці так званих “скульптурних” поверхонь, коли інструмент утримується вздовж нормалі або під кутом до оброблюваної поверхні і повинна бути врахована корекція на змінний радіус інструментів, що застосовувалися. Для реалізації п’ятикоординатного формоутворення до трьох основних приводів подачі у декартовій координатній системі повинні бути добавлені приводи подачі столів, які можуть обертатись, інструментальні головки, що качаються або обертаються, тощо.
Алгоритми багатокординатної інтерполяції відрізняються високою складністю обчислення, хоча у саму структуру геометричної задачі ЧПУ нічого нового не вносять.
Характер підготовки даних для інтерполяції істотно залежить від вибору алгоритмів інтерполяції. Алгоритм інтерполяції виконується циклічно з високою частотою. При цьому вимагаються великі витрати обчислювальної потужності. У зв’язку з цим розробці алгоритмів інтерполяції традиційно приділяли велику увагу, і на сьогоднішній день існує декілька методів інтерполяції та десятки їх версій та варіантів. Далі розглянемо основні групи методів інтерполяції, що використовуються в пристроях ЧПУ: оцінної функції, цифрових диференціальних аналізаторах, прогнозу та корекції.
|
|