Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Подключение к компьютеру Macintosh
|
|
 Убедитесь, что NXT включен. Убедитесь, что комплект Bluetooth также включен, а ваш NXT объявлен видимым (Visible) – процедура описана в подменю Bluetooth NXT. Убедитесь, что Bluetooth установлен и работает на вашем компьютере.
Убедитесь, что NXT включен. Убедитесь, что комплект Bluetooth также включен, а ваш NXT объявлен видимым (Visible) – процедура описана в подменю Bluetooth NXT. Убедитесь, что Bluetooth установлен и работает на вашем компьютере.

В нижнем правом углу рабочего окна программного обеспечения найдите
Контроллер. Кликните по кнопке Окно NXT (NXT window) в верхнем левом углу откроется окно NXT.


«Работа Explorer посредствам беспроводной связи Bluetooth »
ОПИСАНИЕ РАБОТЫ BLUETOOTH
Bluetooth - это современная технология беспроводной передачи данных, позволяющая соединять друг с другом практически любые устройства: мобильные телефоны, ноутбуки, принтеры, цифровые фотоаппараты и даже холодильники, микроволновые печи, кондиционеры. Соединить можно все, что соединяется, то есть имеет встроенный микрочип Bluetooth. Технология стандартизирована, следовательно, проблемы несовместимости устройств от конкурирующих фирм быть не должно.
Bluetooth - это маленький чип, представляющий собой высокочастотный (2, 4 – 2, 48 ГГц) приёмопередатчик, работающий в диапазоне ISM (Industry, Science and Medicine; промышленный, научный и медицинский). Для использования этих частот не требуется лицензия, исключения рассмотрим ниже. Скорость передачи данных, предусматриваемая стандартом, составляет порядка 720 Кбит/с в асимметричном режиме и 420 Кбит/с в полнодуплексном режиме. Обеспечивается передача трех голосовых каналов, но не видеосигнала. Энергопотребление (мощность передатчика) не должно превышать 10 мВт. Изначально технология предполагала возможность связи на расстоянии не более 10 метров. Сегодня некоторые фирмы предлагают микросхемы Bluetooth, способные поддерживать связь на расстоянии до 100 метров. Как радиотехнология, Bluetooth способна " обходить" препятствия, поэтому соединяемые устройства могут находиться вне зоны прямой видимости. Соединение происходит автоматически, как только Bluetooth-устройства оказываются в пределах досягаемости, причем не только по принципу точка - точка (два устройства), но и по принципу точка - много точек (одно устройство работает с несколькими другими). Естественно, для реализации технологии Bluetooth на практике необходимо определенное программное обеспечение (ПО).
Технология Bluetooth предусматривает три уровня защиты:
1. Минимальная - данные кодируются общим ключом и могут приниматься любым устройством без ограничения.
2. Защита на уровне устройства - в чипе прописывается уровень доступа, в соответствии с которым устройство может получать определенные данные от других устройств.
3. Защита на уровне сеанса связи - данные кодируются 128-битными случайными номерами, хранящимися в каждой паре чипов, участвующих в конкретном сеансе связи.
Чип Bluetooth реализован с учетом всех современных тенденций. Размер чипа - менее одного квадратного сантиметра. Применяемая частота позволяет ограничить потребляемую мощность 1мВт. Подобные характеристики позволяют интегрировать чипы Bluetooth в таких устройствах, как мобильные телефоны и карманные компьютеры.
Оказавшись рядом, Bluetooth устройства могут устанавливать не только соединения типа точка-точка, когда имеется только два устройства, но и точка - много точек, когда одно устройство одновременно работает с несколькими другими. При соединении одного устройства с несколькими другими, устройство которое обслуживает несколько соединений, называется master, а подключенные устройства - slave. К одному master’у может быть подключено до семи активных slave. Кроме активных slave (то есть, устройств, которые активно обмениваются данными), может существовать множество неактивных slave, которые не могут обмениваться данными с master, пока заняты все каналы, но, тем не менее, остаются, синхронизированы с ним. Такая структура называется piconet.
В одной piconet может быть только один master, однако каждый slave может одновременно являться master’ом для других устройств, и образовывать свой piconet. Несколько piconet объединенных таким образом образуют scatternet. В рамках scatternet разные устройства могут не только быть одновременно master и slave одновременно для различных piconet, но и просто slave для разных piconet. Более наглядно с этой структурой можно ознакомиться на представленном ниже рисунке 1
Рисунок 1 – Работа структуры piconet
В случае необходимости любой slave в piconet может стать master. Естественно, старый master при этом становится slave. Таким образом, в scatternet могут объединяться столько Bluetooth устройств, сколько необходимо, логические связи могут образовываться так, как это требуется, и могут изменяться как угодно, в случае необходимости. Единственное условие, различные piconet входящие в один scatternet должны иметь разные каналы связи, то есть работать на различных частотах и иметь различные hopping channel. Hopping - это регулярная смена частот, определяемая параметрами hopping sequence. Всего спецификация предусматривает 10 вариантов hopping sequence, 5 с циклом в 79 смен и 5 с циклом в 23 смены. С любым hopping sequence частоты сменяются 1600 hops/sec. Используется hopping для того, что бы бороться с затуханием радиосигнала и интерференцией.
Автоматическая установка соединения между Bluetooth устройствами, находящимися в пределах досягаемости является одной из важнейших особенностей Blueooth, поэтому первое, с чего начинается работа Bluetooth устройства в незнакомом окружении - это device discovery, или, по-русски, поиск других Bluetooth устройств. Для этого посылается запрос, и ответ на него зависит не только от наличия в радиусе связи активных Bluetooth устройств, но и от режима в котором находятся эти устройства. На этом этапе возможно три основных режима:
– Discoverable mode. Находящиеся в этом режиме устройства всегда отвечают на все полученные ими запросы;
– Limited discoverable mode. В этом режиме находятся устройства которые могут отвечать на запросы только ограниченное время, или должны отвечать только при соблюдении определённых условий;
– Non-discoverable mode. Находящиеся в этом режиме устройства, как видно из названия режима, не отвечают на новые запросы.
Даже если удаётся обнаружить устройство, оно может быть в connectable mode или в non-connectable mode. В non-connectable mode устройство не позволяет настроить некоторые важные параметры соединения, и, таким образом, оно хоть и может быть обнаружено, обмениваться данными с ним не удастся. Если устройство находится в connectable mode, то на этом этапе Bluetooth устройства договариваются между собой об используемом диапазоне частот, размере страниц, количестве и порядке hop’ов, и других физических параметрах соединения.
Если процесс обнаружения устройств прошёл нормально, то новое Bluetooth устройство получает набор адресов доступных Bluetooth устройств, и за этим следует device name discovery, когда новое устройство выясняет имена всех доступных Bluetooth устройств из списка. Каждое Bluetooth устройство должно иметь свой глобально уникальный адрес (вроде как MAC-адреса у сетевых плат), но на уровне пользователя обычно используется не этот адрес, а имя устройства, которое может быть любым, и ему не обязательно быть глобально уникальным. Имя Bluetooth устройства может быть длиной до 248 байт, и использовать кодовую страницу в соответствии с Unicode UTF-8 (при использовании UCS-2, имя может быть укорочено до 82 символов). Спецификация предусматривает, что Bluetooth устройства не обязаны принимать больше первых 40 символов имени другого Bluetooth устройства. Если же Bluetooth устройство обладает экраном ограниченного размера, и ограниченной вычислительной мощью, то количество символов, которое оно примет может быть уменьшено до 20.
Ещё одной из важнейших особенностей Bluetooth является автоматическое подключение Bluetooth устройств к службам, предоставляемым другими Bluetooth устройствами. Поэтому, после того как имеется список имён и адресов, выполняется service discovery, поиск доступных услуг, предоставляемых доступными устройствами. Получение или предоставление, каких либо услуг - это то, ради чего всё собственно и затевалось, поэтому для поиска возможных услуг используется специальный протокол, называемый, как несложно догадаться, Service Discovery Protocol (SDP).
Bluetooth не могла обойтись без такой важной вещи, как технология защиты передаваемых данных, встроенной в сам протокол. В зависимости от выполняемых задач, предусмотрено три режима защиты в которых может находится устройство.
– Security mode 1 (non secure), устройство не может самостоятельно инициировать защитные процедуры.
– Security mode 2 (service level enforced security), устройство не инициирует защитные процедуры пока не установлено и не настроено соединение. После того как соединение установлено, процедуры защиты обязательны, и определяются типом и требованиями используемых служб.
– Security mode 3 (link level enforced security), защитные процедуры инициируются в процессе установления и настройки соединения. Если удалённое устройство не может пройти требований защиты, то соединение не устанавливается.
Security mode 3 и 2 могут использоваться вместе, то есть сначала устанавливается защищённое соединение, а потом оно ещё защищается в соответствии с требованиями и возможностями конкретной службы.
Основой системы безопасности Bluetooth, используемой в Security mode 3, является понятие сеансового ключа, или Bond. Сеансовый ключ генерируется в процессе соединения двух устройств, и используется для идентификации и шифрования передаваемых данных. Для генерации ключа могут использоваться самые различные составляющие, от заранее известных обоим устройствам значений, до физических адресов устройств. Комбинируя защиту на уровне соединения с защитой на уровне приложений (где может использоваться абсолютно любая уже существующая на сегодня систем защиты данных) можно создавать достаточно надёжно защищённые соединения. Но всё равно, очевидной слабостью Bluetooth соединений с точки зрения построения защищённых соединений остаётся возможность перехвата трафика, причём для этого даже не придётся использовать, какое либо специфическое оборудование. Впрочем, эта проблема не нова, и в настоящее время часто приходится использовать открытые сети, вроде Интернет, где возможен перехват трафика, для передачи закрытых данных
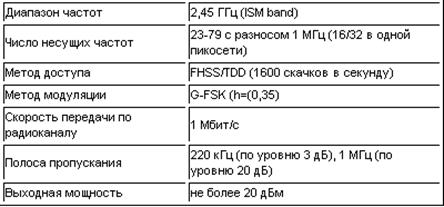
Основные параметры радиоинтерфейса приведены в таблице 3
Таблица 3
Основные параметры радиоинтерфейса
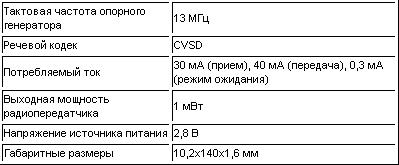
Основные параметры приёмопередатчика Bluetooth приведены в таблице 4
Таблица 4
Параметры приёмопередатчика Bluetooth
В основе технологии Bluetooth лежит принцип дельта модуляции, принцип работы которого показан на рисунке 2

Рисунок 2 – Принцип дельта модуляции
Пример формы сигнала Bluetooth приведён на рисунке 3
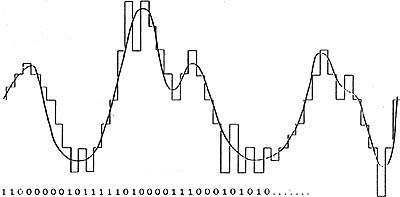
Рисунок 3 – Форма сигнала Bluetooth
Пример формы сигнала Bluetooth с усовершенствованной технологией v2.0+EDR приведена на рисунке 4.

Рисунок 4 – Форма сигнала Bluetooth с усовершенствованной технологией v2.0+EDR
Порядок установки Bluetooth.
Открываем папку с установочными файлами (или заходим на диск).
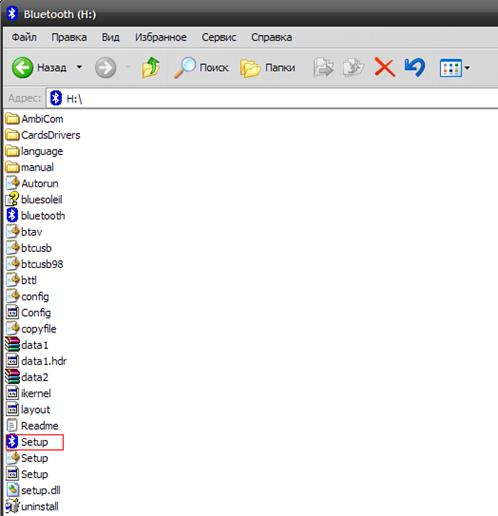
Запускаем Setup.exe.
Нажимаем кнопку ОК
Ожидаем подготовки к установке...
Нажимаем кнопку Далее >
В окне принятия лицензии, нажимаем кнопку Да!
Для продолжения установки нажимаем Далее >

Ожидаем окончания установки драйверов Bluetooth…
Для завершения установки драйверов Bluetooth, устанавливаем галочку на пункте
· Да, перезагрузить компьютер сейчас.
Нажимаем кнопку Готово.
После перезагрузки компьютера, вставляем Bluetooth адаптер в свободный USB порт:
Нажимаем кнопку Далее >
Нажимаем кнопку Далее >
Установка драйвера для Bluetooth адаптера полностью окончена.
Нажимаем кнопку Готово для выхода из установки.
Для запуска управляющей программы запускаем BlueSoleil.Ink

После запуска программы, устанавливаем параметры для компьютера:

Нажимаем кнопку ОК!

Главное окно программы.
В главном окне выбираем команды: Мой Bluetooth à Обнаружение устройств Bluetooth…
Найденное устройство, далее инициализируется...
Далее выполняем следующие действия...
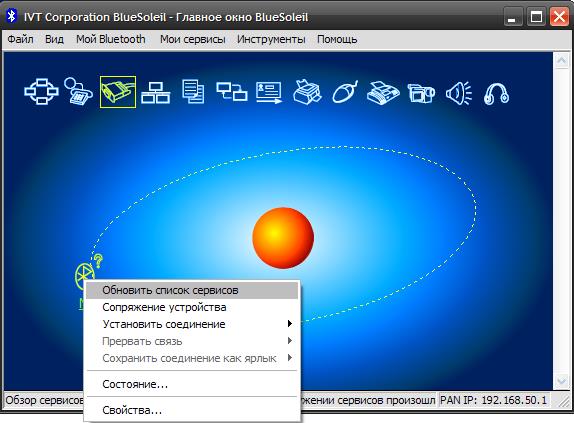
На найденном устройстве, обновляем список сервисов...
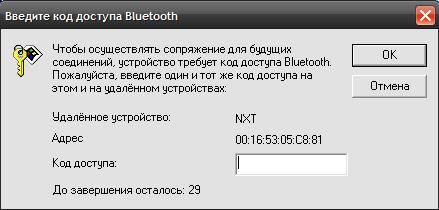
Вводим код доступа к устройству (по умолчанию 1234)
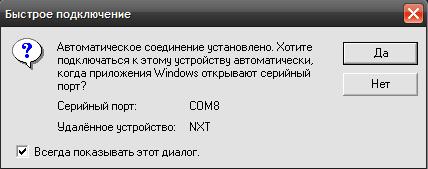
(В каждом конкретном случае, СОМ порт выбирается отдельно, [4, 8, 14 и т.д.], такой же порт выбирается и в программе OnBreak!)
Нажимаем ДА!
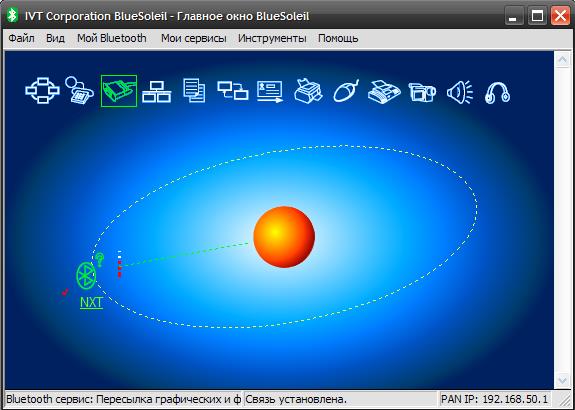
Нажимаем на значок СОМ порта и устанавливаем сопряжение...
Установка программы OnBrick
Запускаем setup.exe
Нажимаем клавишу Next >
Нажимаем клавишу Next >
Нажимаем клавишу Next >
Ждем окончания установки…
Для завершения установки, жмем кнопку Close!
Для начала работы программы, запускам OnBrick.Ink!
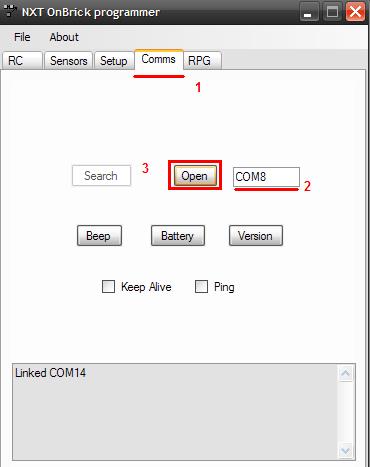
Заходим в программу, выбираем вкладку Comms, выставляем СОМ8, и нажимаем кнопку Open.
Далее возвращаемся во вкладку RC.
Данная работа представляет собой детальное руководство по дистанционному управлению роботом NXT с помощью технологии Bluetooth. Установив программу Onbreak и производя её запуск, перед нами открывается окно управления роботом.
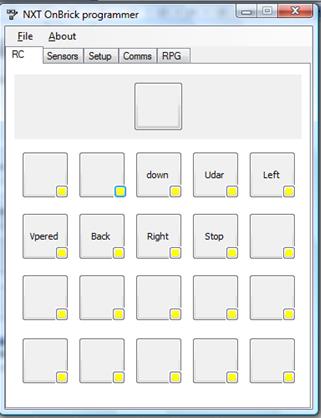
Рисунок 1.- Окно работы программы Onbreak
Руководство осуществляется с помощью следующих клавиш:

(клавиша F6)– движение вперед, пока не будет нажата клавиша Stop.

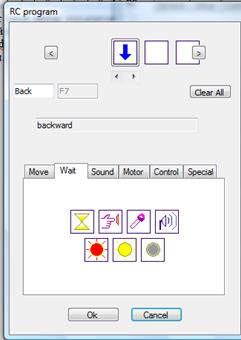
(клавиша F7)- движение назад.

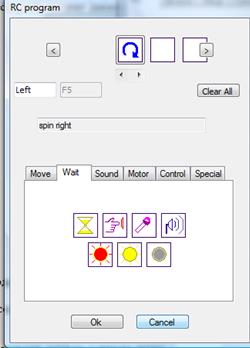
(клавиша F5)-движение влево.

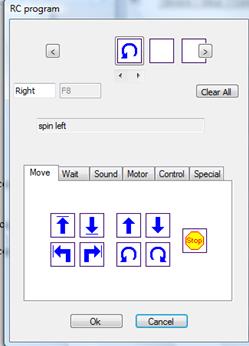
(клавиша F8)- движение вправо.
Для реализации каждой команды используются элементы управления. Данные элементы задаются в свойствах кнопки. Для этого не обходимо нажать квадратик в правом нижнем углу.

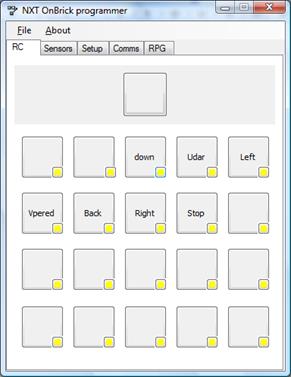
Рисунок 2.- Кнопка, которая открывает свойства клавиши
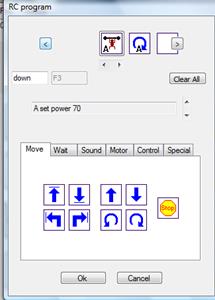
Когда открываются свойства кнопки, то появляется следующие окно (рис. 3). Перечислим его элементы:
1-панель отражения элементов управления, которые заданы данной кнопке.
2- выбор текущего элемента управления
3--название клавиши
4- комбинация клавиши
5- команда Clear All очищает все параметры клавиши
6-поле с пояснениями и настройками текущего элемента управления
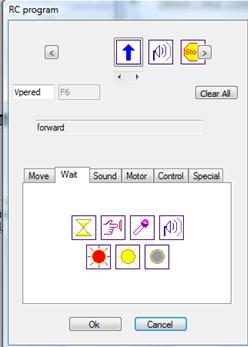
7- панель, которая содержит элементы управления. Они располагаются на 6 вкладках, соответствующих их типу: движение, ожидание, звук, мотор, контроль и пустой элемент.







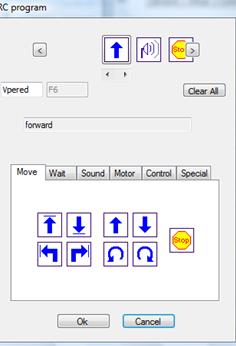
Рисунок 3.- Свойства кнопки
Каждая команда имеет свой набор элементов управления. Рассмотрим свойства каждой кнопки, чтобы понять ее устройство.
1. Клавиша Vpered содержит 3 элемента управления: 1 – движение вперед, 2- нахождение объекта за 20 см., 3- остановка двигателей.
2. Клавиша Back содержит элемент движения назад.
3. Клавиша Left содержит элемент поворота влево
4. Клавиша Right содержит элемент поворота вправо
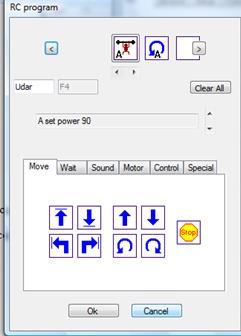
5. Клавиша Udar содержит 2 элемента: 1 – устанавливает мощность движка А(отвечающего за клешню) на 90, 2 – двигает движок А вперед на 70 градусов.
6. Клавиша down содержит 2 элемента управления: 1 – устанавливает мощность движка А(отвечающего за клешню) на 70, 2 – двигает движок А назад на 70 градусов.
Чтобы робот выполнил действие необходимо нажать кнопку с соответствующим именем либо комбинацию клавиши на клавиатуре.
Пример выполнения и назначения работы робота NTX
1. Робот начинает движение, после включения.
2. Если он определяет объект на территории, то он останавливается перед ним.
3. Опускает клешню к объекту
4. Хватает объект клешнёй
5. Забрасывает в тележку объект
6. Выполняет движение в указанное место
Порядок выполнения работы:
1. Получить задание у преподавателя.
2. Установить ПО Bluetooth.
3. Запустить управляющую программу BlueSoleil.Ink
4. Установит ПО On Brick.Ink
5. Проверить дистанционное управление роботом.
6. Защитить лабораторную работу.
Контрольные вопросы:
1.Назначение модуля Bluetooth.
2. Какие статусы подключения Bluetooth в панели иконок.
3. Назначение программы On Brick.Ink.
4. Порядок управления роботом с помощью программы On Brick.Ink.
|
|