Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Введение. для лабораторных работ
|
|
МІНІСТЕРСТВО ОСВІТИ І НАУКИ, МОЛОДІ ТА СПОРТУ УКРАЇНИ
ДОНЕЦЬКИЙ НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ
ІНСТИТУТ ІНФОРМАТИКИ І ШТУЧНОГО ІНТЕЛЕКТУ
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
для лабораторных работ
по дисциплине
“Технические средства систем управления ”
Рассмотрено на заседании кафедры
Компьютеризованных систем управления
Протокол № 12 от 05.06. 2012 г.
Утвержден на заседании
учебно-издательского совета ДонНТУ
Протокол № 04 от 04. 10. 2012 г.
.
Донецк - 2012
УДК 62-529
Методические указания для лабораторных работ студентов по дисциплине “Технические средства систем управления” (для студентов специальности «Компьютеризированные системы управления и автоматики», шифр специальности 6.050201) / Елисеев В.И., Фураева Н.В.- Донецк: СПД Горбунов К.Г., 2012. – 107 с.
В методических указаниях приведены методические указания по выполнению лабораторных работ, варианты заданий и ссылки на литературу, рекомендуемую для самостоятельного изучения.
Составители: ст. преподаватель Елисеев В.И., ассистент Фураева.
Рецензент: доц. Береговых Ю.В..
Ответственный за выпуск ст. преподаватель Елисеев В.И.
СОДЕРЖАНИЕ
| 1. | Введение | |
| 2. | Лабораторная работа № 1. Разработка технического задания на проект робототехнического комплекса. | |
| 3. | Лабораторная работа № 2. Сборка и программирование макета робототехнического комплекса для работы в автономном режиме. | |
| 4. | Лабораторная работа № 3. Дистанционное управление макетом робототехнического комплекса с применением ПК. | |
| 5. | Лабораторная работа № 4. Порядок управления макета робототехнического комплекса посредством мобильного телефона. |
Введение
Совершенствование методов управления различными системами во многом связано с применением в современной науке и практике разнообразных компьютеризованных систем управления.
Преподавание дисциплины “ Технические средства систем управления ” имеет целью обучение студентов элементам информационных систем, назначение и классификация датчиков, требования, предъявляемые к датчикам, надежность элементов систем, практических навыков по созданию и программированию макетов робототехнических комплексов на базе конструктора Mindstorms, созданной компанией LEGO Group.
Курс базируется на знаниях, полученных студентами на предыдущей ступени образования, а также в ходе изучения дисциплин «Компьютерная электроника», «Структуры и организация данных в ПЭВМ», «Теория автоматического управления», «Организация функционирования ЭВМ и систем», «Многоуровневые системы управления», «Организация баз данных и знаний» и др.
При изучении дисциплины применяются различные формы учебных занятий: лекции и лабораторные занятия.
Лабораторные работы предназначены для закрепления теоретического материала, более глубокого ознакомления с существующими стандартами и методиками, ознакомления с технологией NXT и получения практических навыков в составлении ТЗ, сборки и программирования макетов робототехнических комплексов на базе конструктора Mindstorms, созданной компанией LEGO Group.

Конструктор MINDSTORMS NXT позволяет создать тысячи различных роботов. Роботы, которые могут видеть, говорить, чувствовать и двигаться. Если Вы сможете придумать робота, то сможете и создать его!
Создать робота MINDSTORMS не сложно. Соберите робота из элементов LEGO. Запрограммируйте его с помощью простого программного обеспечения и наблюдайте, как робот оживает. Соберите модель, в соответствии с вашим техническим заданием, разработанным в лабораторной работе №1.
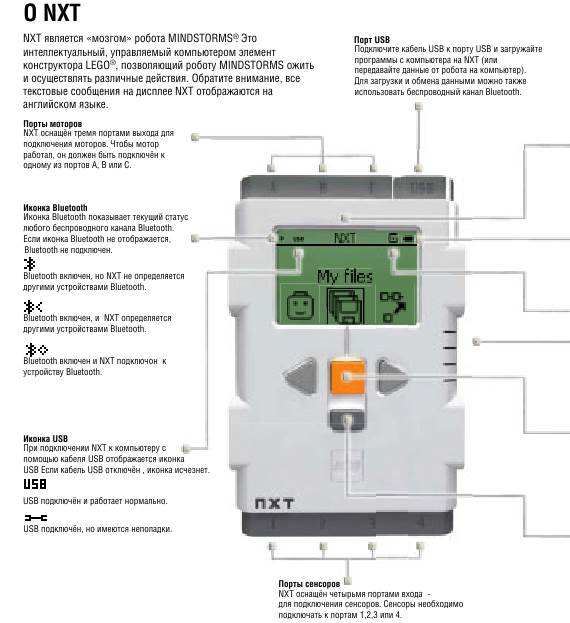
В конструкторе MINDSTORMS NXT применены новейшие технологии робототехники, современный 32-битный программируемый микроконтроллер; программное обеспечение, с удобным интерфейсом на базе иконок, чувствительные сенсоры и интерактивные сервомоторы; разъемы для беспроводного Bluetooth и USB подключений.








 СЕНСОР ЦВЕТА
СЕНСОР ЦВЕТА
 Сенсор цвета является одним из двух сенсоров, которые заменяют роботу зрение (другой сенсор - ультразвуковой). Фактически, сенсор цвета совмещает три функции. Сенсор цвета позволяет роботу различать цвета и отличать свет от
темноты. Он может различать 6 цветов, считывать интенсивность света в помещении, а также измерять цветовую интенсивность окрашенных поверхностей. Сенсор цвета может также использоваться в качестве цветной подсветки.
Рекомендации по использованию.
Сенсор цвета можно использовать, чтобы отсортировать детали конструктора LEGO или чтобы заставить робота следовать вдоль красной линии или сменить направление движения при обнаружении красного пятна. Сенсор может также использоваться в качестве цветовой подсветки, что
позволит вашему роботу приобрести дополнительные индивидуальные возможности.
Использование сенсора для детекции цвета.
Для корректного определения цвета необходимо держать сенсор под прямым углом на расстоянии 1 см над поверхностью. Показания сенсора могут быть
ошибочными, если расположить прибор под иным углом к поверхности или использовать его при ярком освещении.
Сенсор цвета является одним из двух сенсоров, которые заменяют роботу зрение (другой сенсор - ультразвуковой). Фактически, сенсор цвета совмещает три функции. Сенсор цвета позволяет роботу различать цвета и отличать свет от
темноты. Он может различать 6 цветов, считывать интенсивность света в помещении, а также измерять цветовую интенсивность окрашенных поверхностей. Сенсор цвета может также использоваться в качестве цветной подсветки.
Рекомендации по использованию.
Сенсор цвета можно использовать, чтобы отсортировать детали конструктора LEGO или чтобы заставить робота следовать вдоль красной линии или сменить направление движения при обнаружении красного пятна. Сенсор может также использоваться в качестве цветовой подсветки, что
позволит вашему роботу приобрести дополнительные индивидуальные возможности.
Использование сенсора для детекции цвета.
Для корректного определения цвета необходимо держать сенсор под прямым углом на расстоянии 1 см над поверхностью. Показания сенсора могут быть
ошибочными, если расположить прибор под иным углом к поверхности или использовать его при ярком освещении.
 Использование сенсора в качестве сенсора света.
Сенсор цвета можно использовать для измерения значений уровня освещенности. Прибор выполняет функции сенсора света, если в настройках в качестве цвета освещения выбран красный. Использование другого цвета [зеленого или синего] может привести к получению иных результатов.
Сенсор может измерять интенсивность естественного освещения и отраженного света. При определении интенсивности последнего на сенсоре загорается любой из трех цветов.
Использование сенсора в качестве цветной подсветки.
Сенсор можно использовать в качестве цветной подсветки с возможностью выбора одного из трех цветов [красный, зеленый или синий], что позволит вашему роботу приобрести дополнительные индивидуальные возможности.
СЕНСОР НАЖАТИЯ
Использование сенсора в качестве сенсора света.
Сенсор цвета можно использовать для измерения значений уровня освещенности. Прибор выполняет функции сенсора света, если в настройках в качестве цвета освещения выбран красный. Использование другого цвета [зеленого или синего] может привести к получению иных результатов.
Сенсор может измерять интенсивность естественного освещения и отраженного света. При определении интенсивности последнего на сенсоре загорается любой из трех цветов.
Использование сенсора в качестве цветной подсветки.
Сенсор можно использовать в качестве цветной подсветки с возможностью выбора одного из трех цветов [красный, зеленый или синий], что позволит вашему роботу приобрести дополнительные индивидуальные возможности.
СЕНСОР НАЖАТИЯ
 Сенсор Нажатия позволяет роботу осуществлять прикосновения. Сенсор нажатия может определить момент нажатияна него чего-либо, а так же момент освобождения.
Сенсор Нажатия позволяет роботу осуществлять прикосновения. Сенсор нажатия может определить момент нажатияна него чего-либо, а так же момент освобождения.
 Рекомендации по использованию.
С помощью Сенсора Нажатия робот может выполнять множество операций: при подключении Сенсора Нажатия к ноге робот способен определить пройденное им расстояние, подсчитав количество нажатий на Сенсор Нажатия.
Сенсор нажатия позволит вам определить, встретил ли робот препятствие на пути, и какова его реакция. Кроме того, сенсор нажатия можно использовать для подачи роботу команды. Например, нажав и отпустив сенсор нажатия, вы подаете роботу команду передвигаться, говорить, закрыть дверь, включить телевизор.
УЛЬТРАЗВУКОВОЙ СЕНСОР
Рекомендации по использованию.
С помощью Сенсора Нажатия робот может выполнять множество операций: при подключении Сенсора Нажатия к ноге робот способен определить пройденное им расстояние, подсчитав количество нажатий на Сенсор Нажатия.
Сенсор нажатия позволит вам определить, встретил ли робот препятствие на пути, и какова его реакция. Кроме того, сенсор нажатия можно использовать для подачи роботу команды. Например, нажав и отпустив сенсор нажатия, вы подаете роботу команду передвигаться, говорить, закрыть дверь, включить телевизор.
УЛЬТРАЗВУКОВОЙ СЕНСОР
 Ультразвуковой сенсор – один из двух сенсоров, заменяющих роботу зрение. Ультразвуковой сенсор позволяет роботу видеть и обнаруживать объекты.
Его также можно использовать для того, чтобы робот мог обойти препятствия, оценить и измерить расстояние, а также зафиксировать движение объекта. Ультразвуковой сенсор изменяется в сантиметрах и дюймах от NXT. Он может измерять расстояние от 0 до 255 сантиметров с точностью +/-3 см.
Ультразвуковой сенсор работает по тому же принципу, что и локатор летучей мыши: он измеряет расстояние путем расчета времени, которое потребовалось звуковой волне для возвращения после отражения от объекта, подобно эху.
Крупные объекты с твердыми поверхностями определяются лучше всего. Объекты из мягких материалов (тканей) или округлые (мяч), а также слишком тонкие, маленькие и т.п., могут создавать для сенсора определенные затруднения при работе.
Следует помнить, что два и более ультразвуковых датчика, работающих в одном помещении, могут интерферировать и снижать точность результатов.
Рекомендации по использованию.
Ультразвуковой датчик можно использовать для множества различных целей.
ИНТЕРАКТИВНЫЕ СЕРВОМОТОРЫ
Ультразвуковой сенсор – один из двух сенсоров, заменяющих роботу зрение. Ультразвуковой сенсор позволяет роботу видеть и обнаруживать объекты.
Его также можно использовать для того, чтобы робот мог обойти препятствия, оценить и измерить расстояние, а также зафиксировать движение объекта. Ультразвуковой сенсор изменяется в сантиметрах и дюймах от NXT. Он может измерять расстояние от 0 до 255 сантиметров с точностью +/-3 см.
Ультразвуковой сенсор работает по тому же принципу, что и локатор летучей мыши: он измеряет расстояние путем расчета времени, которое потребовалось звуковой волне для возвращения после отражения от объекта, подобно эху.
Крупные объекты с твердыми поверхностями определяются лучше всего. Объекты из мягких материалов (тканей) или округлые (мяч), а также слишком тонкие, маленькие и т.п., могут создавать для сенсора определенные затруднения при работе.
Следует помнить, что два и более ультразвуковых датчика, работающих в одном помещении, могут интерферировать и снижать точность результатов.
Рекомендации по использованию.
Ультразвуковой датчик можно использовать для множества различных целей.
ИНТЕРАКТИВНЫЕ СЕРВОМОТОРЫ
 Три сервомотора дают роботу возможность двигаться. Если вы используете блок «Движение» (Move) в программном обеспечении для программирования моторов,
оба мотора автоматически синхронизируются, и робот сможет двигаться по прямой.
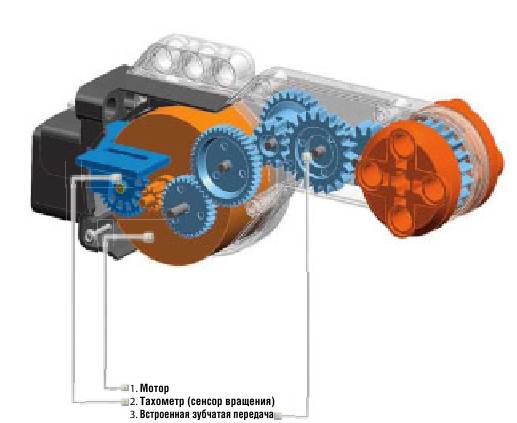
Встроенный сенсор вращения.
В каждый мотор встроен сенсор вращения. Он позволяет точнее вести управление движениями робота. Сенсор вращения измеряет вращение мотора
в градусах или поворотах (с точностью до +/- одного градуса). Одно вращение состоит из 360 градусов, поэтому, если вы установите мотор на вращение 180
градусов, в результате ось сделает пол-оборота.
Три сервомотора дают роботу возможность двигаться. Если вы используете блок «Движение» (Move) в программном обеспечении для программирования моторов,
оба мотора автоматически синхронизируются, и робот сможет двигаться по прямой.
Встроенный сенсор вращения.
В каждый мотор встроен сенсор вращения. Он позволяет точнее вести управление движениями робота. Сенсор вращения измеряет вращение мотора
в градусах или поворотах (с точностью до +/- одного градуса). Одно вращение состоит из 360 градусов, поэтому, если вы установите мотор на вращение 180
градусов, в результате ось сделает пол-оборота.
 Встроенный в каждый мотор сенсор вращения также позволяет устанавливать различные скорости для моторов (выставлением различных параметров мощности в программном обеспечении).
Встроенный в каждый мотор сенсор вращения также позволяет устанавливать различные скорости для моторов (выставлением различных параметров мощности в программном обеспечении).
 Пример:
ТЕХНИЧЕСКОЕ ЗАДАНИЕ
1. Введение
1.1 Наименование программного продукта
Наименование – «Программный робот Lego Mindstorms - Tribot»
1.1.1 Краткая характеристика области применения
Программный робот «Tribot» предназначен для поиска лежащего предмета (объекта поиска) и перемещение его в указанное место.
2 Основание для разработки.
2.1 Основания для проведения разработки
Для ознакомления с работой робототехнического комплекса компании «Lego» кафедрой КСУ было предложено разработка робота «Tribot».
2.2 Наименование и условное обозначение темы разработки
Наименование темы разработки – «Разработка программного робота Lego Mindstorms - Tribot»
3 Назначение разработки
3.1 Функциональное назначение
Функциональным назначением робота «Tribot», является предоставление пользователю возможности работы с комплектующими и датчиками компании «Lego».
3.2 Эксплуатационное назначение
Робот должен эксплуатироваться в профильных предметах на учебных занятиях.
4 Требования к роботу и программному обеспечению
4.1 Требование к функциональным характеристикам
4.1.1 требования к составу выполняемых функций
Разработка робота «Tribot» должна обеспечить возможность выполнение перечисленных функций:
а) изучение всех комплектующих деталей робота «Tribot».
б) изучить работу всех датчиков, участвующих в разработке робота.
в) «Tribot» должен найти соответствующий объект.
г) найденный объект взять в «клешни» и перевезти в указанное место.
4.1.2 Требования к организации входных данных
Входные данные поступают от пользователя, т.е. происходит включение робота.
Файлы программного продукта должны храниться на съёмных носителях или локальных дисках, отформатированных, согласно требуемой операционной системы.
4.1.3 Требования к организации выходных данных
Робот «Tribot» должен выполнять все задачи, поставленные перед ним, в соответствии с поставленными задачами.
4.2 Условия эксплуатации
4.2.1 Климатические условия эксплуатации
Климатические условия эксплуатации, при которых должны обеспечиваться заданные характеристики, должны удовлетворять требованиям, предъявляемых к техническим средствам робота «Tribot»
4.2.2 Требование к численности и квалификации персонала
Минимальное количество персонала, требуемого для демонстрации работы робота «Tribot», должно составлять не более 5 штатных лиц:
1 администратор и 4 пользователя – 4 оператора.
Администратор должен обладать теоретическими и практическими навыками работы с роботом, уметь программировать и задавать новые функции.
Оператор помогает тестировать и проверять на работоспособность робота.
4.3 Требования к составу технических средств
В случае использования пользователем непосредственного управления устройством через Bluetooth, в состав технических средств должен входить IBM-совместимый персональный компьютер, включающий в себя:
– процессор Pentium с тактовой частотой 1400 MГц;
– материнскую плату с FSB не менее 150 ГГц;
– оперативную память объемом не менее 128 Мб;
– устройство Bluetooth
4.4 Требования к маркировке и упаковке
Запчасти для устройства и программное обеспечение поставляется представителем корпорации «Lego Mindstorms» в Украине в специальной фирменной упаковке
4.5 Специальные требования
Интерфейс управления устройством должен обеспечить взаимодействие с пользователем при помощи специального программного обеспечения, предоставленного корпорацией Lego Mindstorms в Украине
5 Этапы разработки и приема
5.1 Этапы разработки
Разработка должна быть проведена в три этапа:
1) разработка технического задания для устройства;
2) построение модели устройства;
3) описание принципов работы устройства
5.2 Этапы испытания
1) Приемо-сдаточные испытания устройства должны проводится в присутствии руководителя.
2) Приемо-сдаточные испытания устройства должны проводится согласно разработанной исполнителем и согласованной руководителя программы.
5.3 Общие требования к приемке работы
На основании результата проведения испытаний исполнитель совместной с руководителем подписывают документ, характеризующий прием-сдачу программы в эксплуатацию
Порядок выполнения работы:
1. Получить задание у преподавателя.
2. Ознакомиться с общим обзором технологий NXT.
3. Ознакомиться со стандартами ГОСТ 34.602-89, ГОСТ 19.201-78, ГОСТ 16521-70.
4. Разработать техническое задание выбранного устройства.
5. Защитить лабораторную работу.
Контрольные вопросы:
1. Стандартные параметры портов для сенсоров и моторов.
2. Порядок подключения моторов к NXT.
3. Порядок подключения сенсора к NXT.
4. Порядок загрузки и обмена данными.
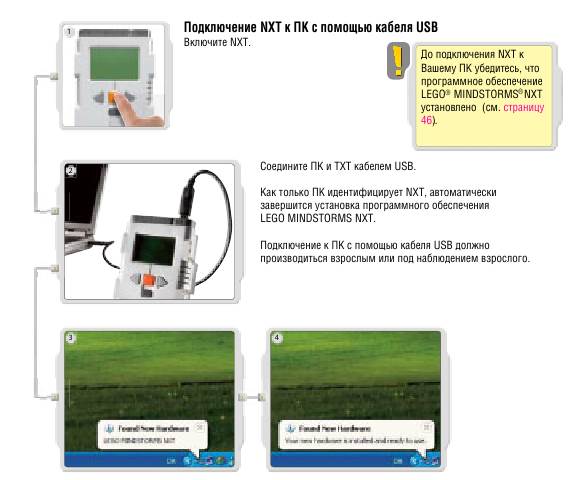
5. Порядок подключения NXT к ПК.
Лабораторная работа № 2.
Сборка и программирование макета робототехнического комплекса.
В лабораторной работе описать порядок сборки макета робототехнического комплекса с описанием функций и иллюстрациями в соответствии с утвержденным ТЗ. Сборку макетов робототехнических комплексов осуществлять на базе конструктора Mindstorms, созданной компанией LEGO Group. Составить программу работы макета в автономном режиме. Интерфейс управления устройством должен обеспечить взаимодействие с пользователем при помощи специального программного обеспечения, предоставленного корпорацией Lego Mindstorms в Украине. Предоставить техническое руководство к сборке макета.
Порядок сборки макета робототехнического комплекса.
Пример:
ТЕХНИЧЕСКОЕ ЗАДАНИЕ
1. Введение
1.1 Наименование программного продукта
Наименование – «Программный робот Lego Mindstorms - Tribot»
1.1.1 Краткая характеристика области применения
Программный робот «Tribot» предназначен для поиска лежащего предмета (объекта поиска) и перемещение его в указанное место.
2 Основание для разработки.
2.1 Основания для проведения разработки
Для ознакомления с работой робототехнического комплекса компании «Lego» кафедрой КСУ было предложено разработка робота «Tribot».
2.2 Наименование и условное обозначение темы разработки
Наименование темы разработки – «Разработка программного робота Lego Mindstorms - Tribot»
3 Назначение разработки
3.1 Функциональное назначение
Функциональным назначением робота «Tribot», является предоставление пользователю возможности работы с комплектующими и датчиками компании «Lego».
3.2 Эксплуатационное назначение
Робот должен эксплуатироваться в профильных предметах на учебных занятиях.
4 Требования к роботу и программному обеспечению
4.1 Требование к функциональным характеристикам
4.1.1 требования к составу выполняемых функций
Разработка робота «Tribot» должна обеспечить возможность выполнение перечисленных функций:
а) изучение всех комплектующих деталей робота «Tribot».
б) изучить работу всех датчиков, участвующих в разработке робота.
в) «Tribot» должен найти соответствующий объект.
г) найденный объект взять в «клешни» и перевезти в указанное место.
4.1.2 Требования к организации входных данных
Входные данные поступают от пользователя, т.е. происходит включение робота.
Файлы программного продукта должны храниться на съёмных носителях или локальных дисках, отформатированных, согласно требуемой операционной системы.
4.1.3 Требования к организации выходных данных
Робот «Tribot» должен выполнять все задачи, поставленные перед ним, в соответствии с поставленными задачами.
4.2 Условия эксплуатации
4.2.1 Климатические условия эксплуатации
Климатические условия эксплуатации, при которых должны обеспечиваться заданные характеристики, должны удовлетворять требованиям, предъявляемых к техническим средствам робота «Tribot»
4.2.2 Требование к численности и квалификации персонала
Минимальное количество персонала, требуемого для демонстрации работы робота «Tribot», должно составлять не более 5 штатных лиц:
1 администратор и 4 пользователя – 4 оператора.
Администратор должен обладать теоретическими и практическими навыками работы с роботом, уметь программировать и задавать новые функции.
Оператор помогает тестировать и проверять на работоспособность робота.
4.3 Требования к составу технических средств
В случае использования пользователем непосредственного управления устройством через Bluetooth, в состав технических средств должен входить IBM-совместимый персональный компьютер, включающий в себя:
– процессор Pentium с тактовой частотой 1400 MГц;
– материнскую плату с FSB не менее 150 ГГц;
– оперативную память объемом не менее 128 Мб;
– устройство Bluetooth
4.4 Требования к маркировке и упаковке
Запчасти для устройства и программное обеспечение поставляется представителем корпорации «Lego Mindstorms» в Украине в специальной фирменной упаковке
4.5 Специальные требования
Интерфейс управления устройством должен обеспечить взаимодействие с пользователем при помощи специального программного обеспечения, предоставленного корпорацией Lego Mindstorms в Украине
5 Этапы разработки и приема
5.1 Этапы разработки
Разработка должна быть проведена в три этапа:
1) разработка технического задания для устройства;
2) построение модели устройства;
3) описание принципов работы устройства
5.2 Этапы испытания
1) Приемо-сдаточные испытания устройства должны проводится в присутствии руководителя.
2) Приемо-сдаточные испытания устройства должны проводится согласно разработанной исполнителем и согласованной руководителя программы.
5.3 Общие требования к приемке работы
На основании результата проведения испытаний исполнитель совместной с руководителем подписывают документ, характеризующий прием-сдачу программы в эксплуатацию
Порядок выполнения работы:
1. Получить задание у преподавателя.
2. Ознакомиться с общим обзором технологий NXT.
3. Ознакомиться со стандартами ГОСТ 34.602-89, ГОСТ 19.201-78, ГОСТ 16521-70.
4. Разработать техническое задание выбранного устройства.
5. Защитить лабораторную работу.
Контрольные вопросы:
1. Стандартные параметры портов для сенсоров и моторов.
2. Порядок подключения моторов к NXT.
3. Порядок подключения сенсора к NXT.
4. Порядок загрузки и обмена данными.
5. Порядок подключения NXT к ПК.
Лабораторная работа № 2.
Сборка и программирование макета робототехнического комплекса.
В лабораторной работе описать порядок сборки макета робототехнического комплекса с описанием функций и иллюстрациями в соответствии с утвержденным ТЗ. Сборку макетов робототехнических комплексов осуществлять на базе конструктора Mindstorms, созданной компанией LEGO Group. Составить программу работы макета в автономном режиме. Интерфейс управления устройством должен обеспечить взаимодействие с пользователем при помощи специального программного обеспечения, предоставленного корпорацией Lego Mindstorms в Украине. Предоставить техническое руководство к сборке макета.
Порядок сборки макета робототехнического комплекса.

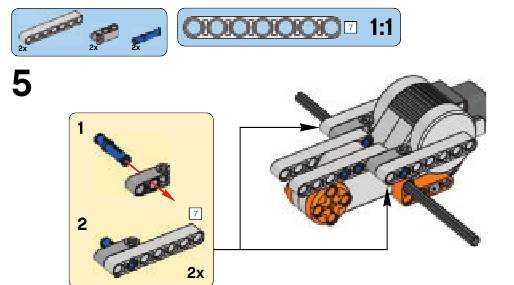




 Например: «Техническое руководство к сборке и эксплуатации робототехнического комплекса «Claw Striker»
Для сборки робототехнического комплекса “Claw Striker”, понадобится основа, использующаяся в других комплексах. Сборка начинается именно с нее.
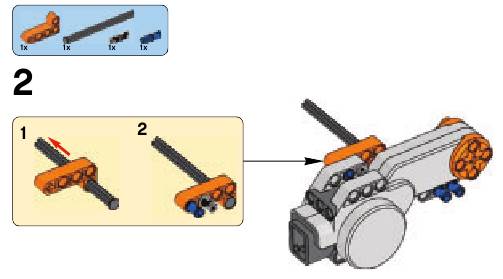
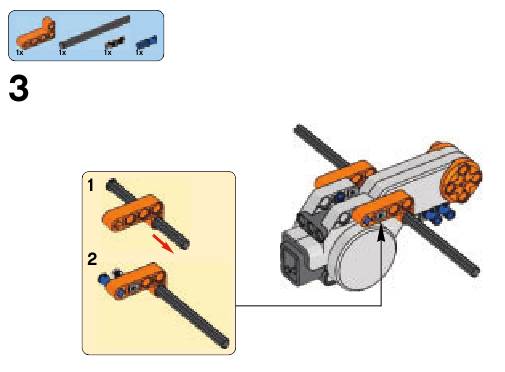
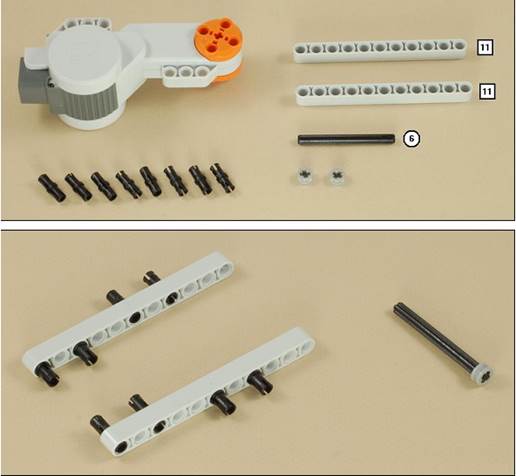
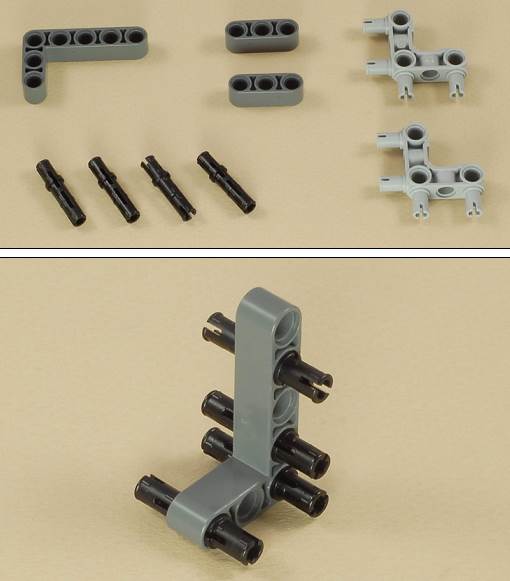
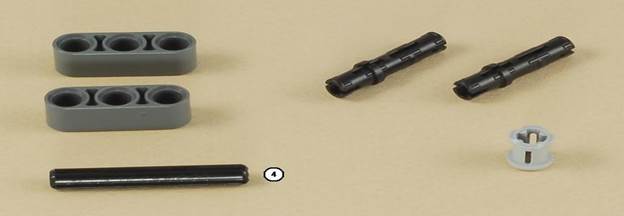
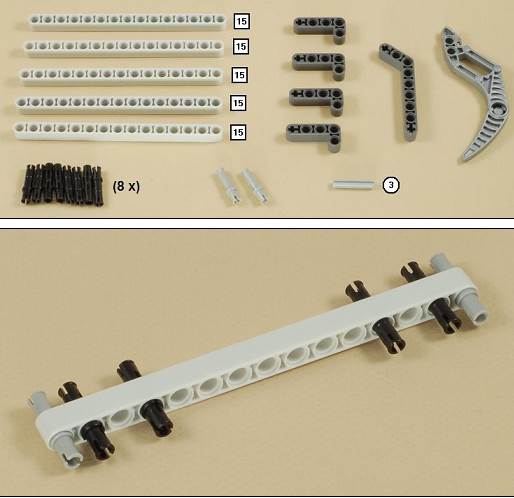
1. Для начала, к функциональному блоку NXT крепится крепеж для основной системы, которая будет выполнять функцию передвижения.
Возьмём 1 мотор и необходимые детали и соединим их так, как показано на рисунках:
Например: «Техническое руководство к сборке и эксплуатации робототехнического комплекса «Claw Striker»
Для сборки робототехнического комплекса “Claw Striker”, понадобится основа, использующаяся в других комплексах. Сборка начинается именно с нее.
1. Для начала, к функциональному блоку NXT крепится крепеж для основной системы, которая будет выполнять функцию передвижения.
Возьмём 1 мотор и необходимые детали и соединим их так, как показано на рисунках:
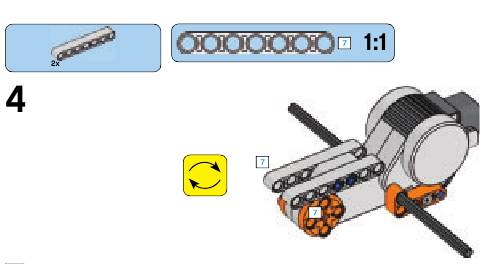
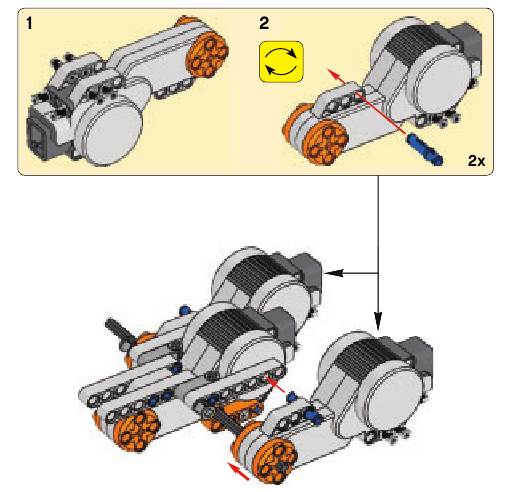
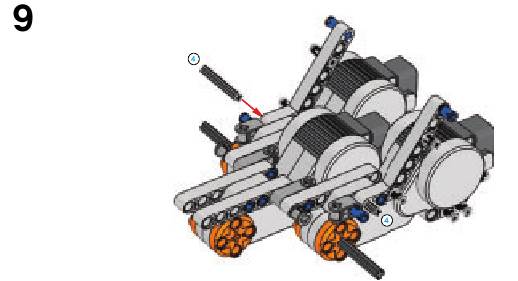
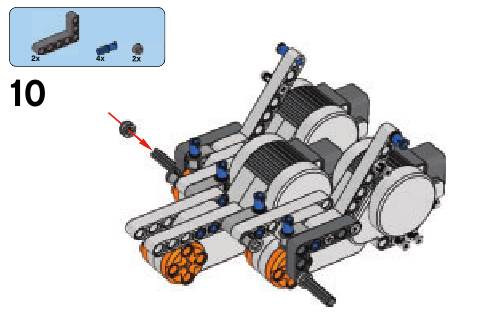
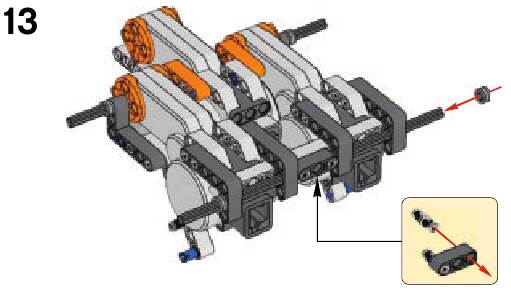
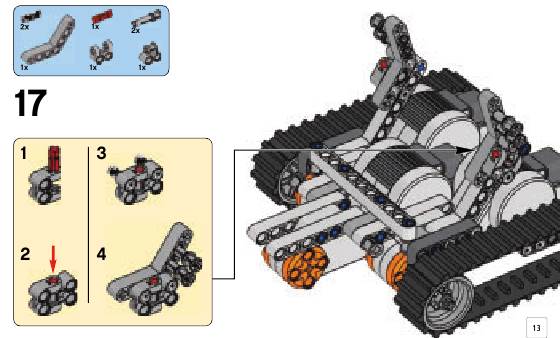
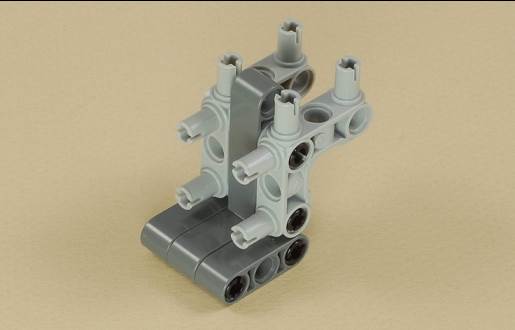
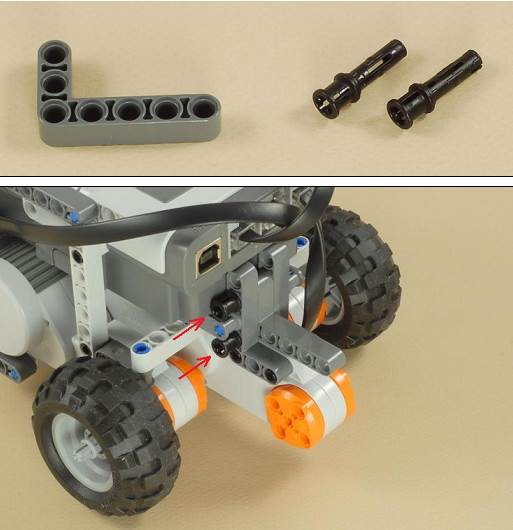
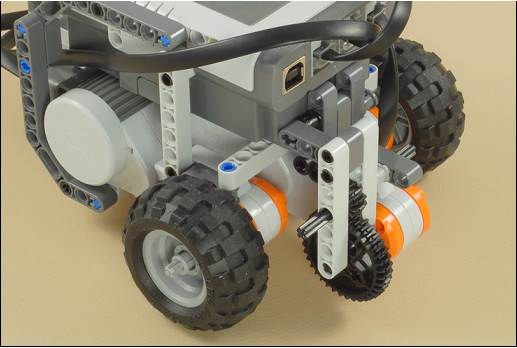
 2. Собираем крепления для приводов и крепим их к функциональному блоку, которые состоят из 2 моторов и необходимых крепления:
2. Собираем крепления для приводов и крепим их к функциональному блоку, которые состоят из 2 моторов и необходимых крепления:
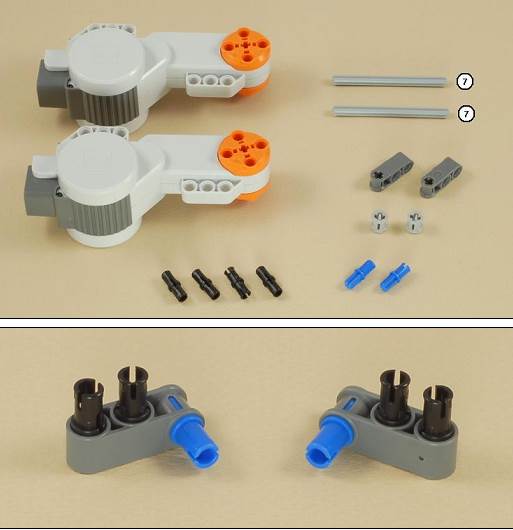


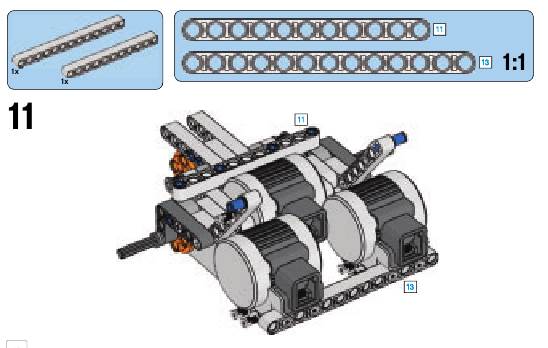
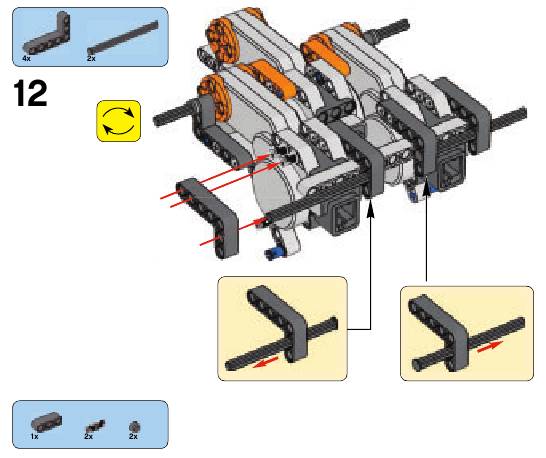
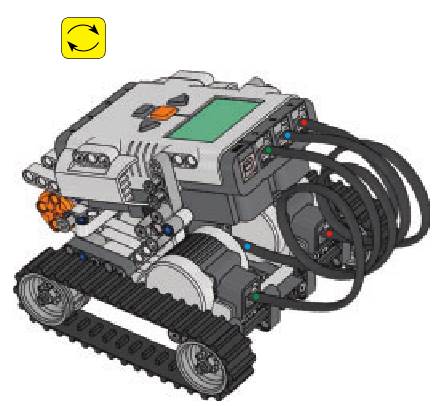
 3. Устанавливаем серво - приводы и соединяем их USB-кабелями:
3. Устанавливаем серво - приводы и соединяем их USB-кабелями:
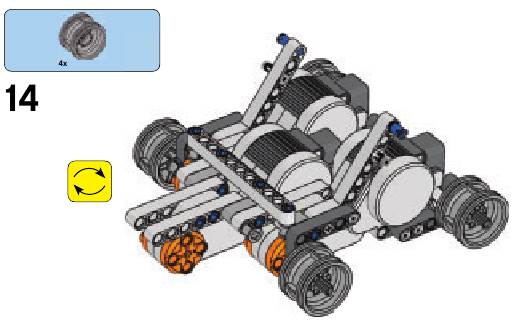
 4. Установка колёс:
4. Установка колёс:
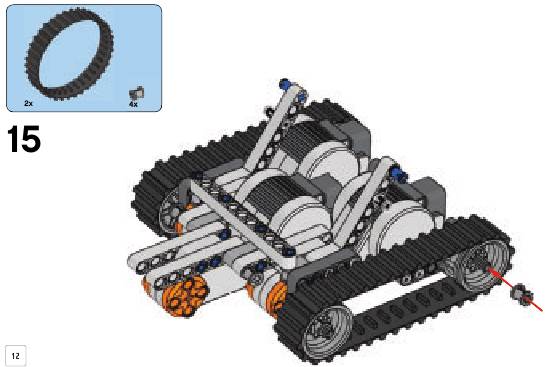
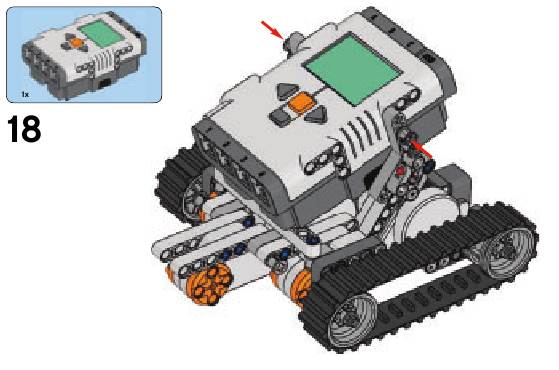
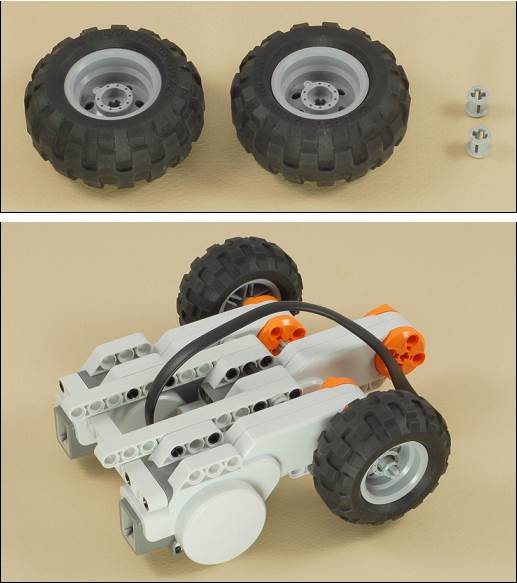 5. Установка остальных частей основной части робота:
5. Установка остальных частей основной части робота:
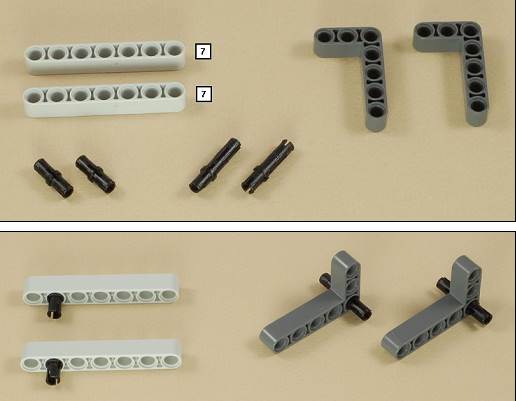

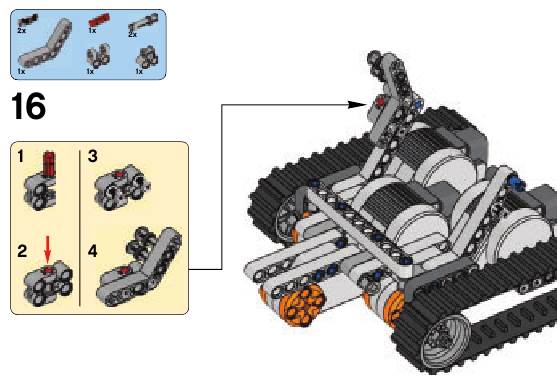
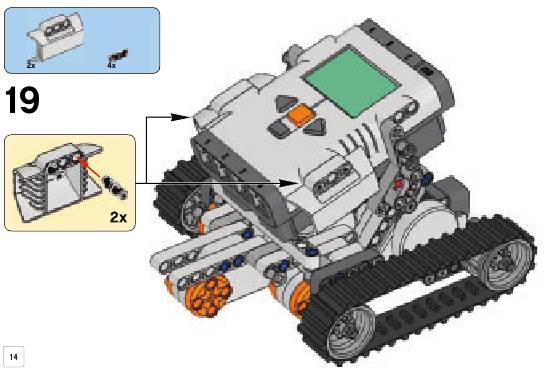
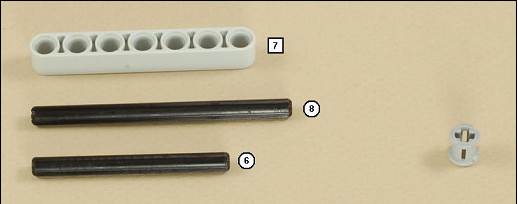
 6. Сборка третьей точки опоры комплекса (крепление 1)
6. Сборка третьей точки опоры комплекса (крепление 1)

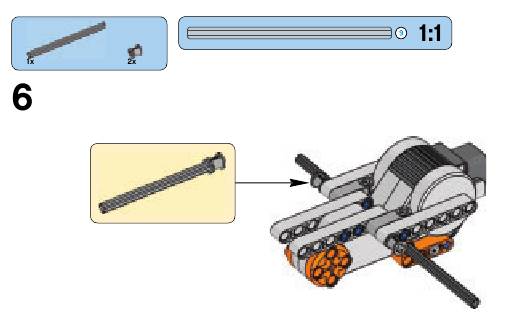
 7. Сборка третьей точки опоры комплекса (крепление 2)
7. Сборка третьей точки опоры комплекса (крепление 2)

 8. Сборка третьей точки опоры комплекса (колесо)
8. Сборка третьей точки опоры комплекса (колесо)
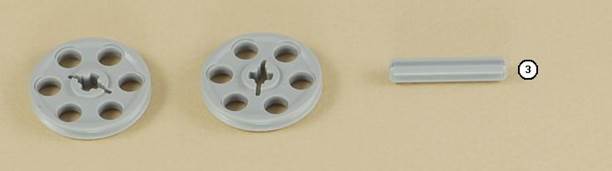
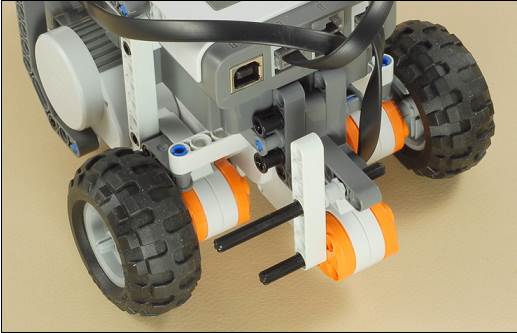
 9. Установка третьей точки опоры комплекса
9. Установка третьей точки опоры комплекса
 10. Готовый вид основы используемой для движения
10. Готовый вид основы используемой для движения
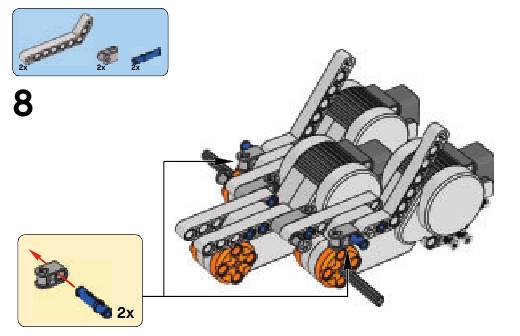
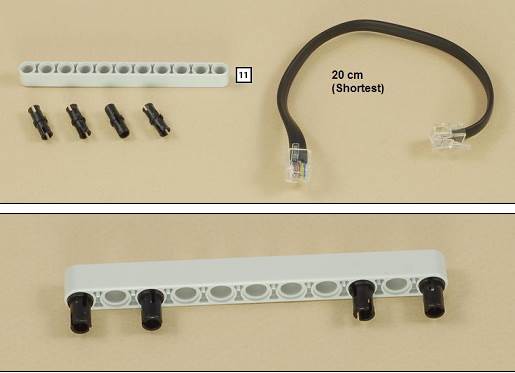
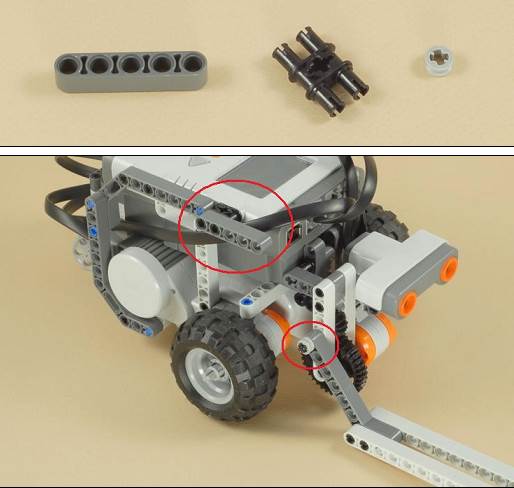
 11. Сборка и установка креплений для ультразвукового датчика и «полуклешни»
11. Сборка и установка креплений для ультразвукового датчика и «полуклешни»

 12. Установка ультразвукового датчика
12. Установка ультразвукового датчика


 13.Сборка и крепление «полуклешни»
13.Сборка и крепление «полуклешни»


 Подменю «Мои файлы» позволяет осуществить обзор всех программ, заданных для NXT либо загруженных с компьютера.
Подменю «Мои файлы» позволяет осуществить обзор всех программ, заданных для NXT либо загруженных с компьютера.
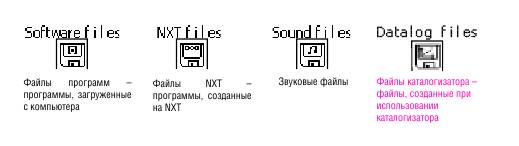 Файлы автоматически размещаются в соответствующих папках. При загрузке в NXT программы, включающий файл аудио, программа будет размещена в папке «Файлы программ», а аудиоданные будут размещены в папке «Файлы аудио». Вы можете отправлять файлы другим NXT.
Файлы автоматически размещаются в соответствующих папках. При загрузке в NXT программы, включающий файл аудио, программа будет размещена в папке «Файлы программ», а аудиоданные будут размещены в папке «Файлы аудио». Вы можете отправлять файлы другим NXT.
 С помощью подменю Программа NXT можно создать тысячи различных программ без помощи компьютера. Можно составить несложную программу. Пусть робот двигается вперед и назад при нажатии Сенсора Нажатия. Робот будет двигаться вперед до момента прекращения нажатия Сенсора Нажатия, после этого он начинает движение назад. Когда происходит следующее нажатие сенсора нажатия, робот снова двигается вперед. Действие повторяется до тех пор, пока Вы не остановите программу.
Попробуйте составить эту несложную программу, и вы увидите, что работа проста и доступна:
Пусть робот двигается вперед и назад при нажатии Сенсора Нажатия. Робот
будет двигаться вперед до момента прекращения нажатия Сенсора Нажатия,
после этого он начинает движение назад. Когда происходит следующее
нажатие сенсора нажатия, робот снова двигается вперед. Действие повторяется до тех пор, пока вы не остановите программу.
Убедитесь, что сенсоры и моторы подключены к необходимым портам.
С помощью подменю Программа NXT можно создать тысячи различных программ без помощи компьютера. Можно составить несложную программу. Пусть робот двигается вперед и назад при нажатии Сенсора Нажатия. Робот будет двигаться вперед до момента прекращения нажатия Сенсора Нажатия, после этого он начинает движение назад. Когда происходит следующее нажатие сенсора нажатия, робот снова двигается вперед. Действие повторяется до тех пор, пока Вы не остановите программу.
Попробуйте составить эту несложную программу, и вы увидите, что работа проста и доступна:
Пусть робот двигается вперед и назад при нажатии Сенсора Нажатия. Робот
будет двигаться вперед до момента прекращения нажатия Сенсора Нажатия,
после этого он начинает движение назад. Когда происходит следующее
нажатие сенсора нажатия, робот снова двигается вперед. Действие повторяется до тех пор, пока вы не остановите программу.
Убедитесь, что сенсоры и моторы подключены к необходимым портам.

Попробуйте задать и вот такие программы:
Подменю «Попробуй» (Try Me) позволит провести забавные тесты сенсоров и моторов:
Подключите сенсоры и моторы к соответствующим портам NXT. Важное примечание: Воспользуйтесь стандартными параметрами установок для портов, приведенными на странице 11. Выберите программу. При нажатии оранжевой кнопки (Ввод, Enter) наблюдайте за реакциями сенсоров и моторов. Попробуйте запустить другие программы подменю «Попробуй» (Try Me), при этом вы услышите забавные звуки, увидите изображения и сможете наблюдать различные возможные действия моторов. Эти пробные файлы «Try Me» можно удалить в любой момент из подменю «Установки» (Settings).
Подменю «Обзор» (View) позволяет провести быстрое тестирование сенсоров и моторов, а также получить текущие данные с каждого устройства.
Подключите к NXT сенсор и мотор, который вы хотите протестировать, Подменю «Обзор» (View) поможет Вам выбрать правильный порт, кроме того, вы можете проверить рекомендуемые настройки, указанные на странице 11.
Выберите «Обзор» (View) на дисплее NXT.
Подменю «Установки» (Settings) позволяет настраивать параметры установки NXT, включая громкость громкоговорителей или режим автоматического отключения (Sleep mode). Это подменю также позволяет удалять программы, хранящиеся в памяти NXT.
Автоматическое отключение (Sleep mode): Вы можете настроить NXT на автоматическое отключение по истечении периода бездействия продолжительностью 2, 5, 10, 30 или 60 минут (если в течение этого времени робот не производил никаких действий). Можно также выбрать значение «Никогда» (Never), при этом робот будет находиться во включенном состоянии сколь угодно долго (пока вы его не отключите). Однако следует помнить, что значение «Никогда» (Never) приведет к более быстрому разряду батареек.
|








|
|