Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Сегментування за густиною пікселів
|
|
Задача сегментування зображення має на меті різні цілі: 1) віднімання світло-сірого фону від облич та інших зображень, 2) віднімання чорного фону з зображень, 3) поділ інтенсивності зображення на дві і більше частин для опрацювання образу по частинах. 4) виділення регіонів зображення тощо. Для знаходження порогу сегментування застосуємо наступний алгоритм.
Використаємо поняття гіпотетичного зображення – це множина пікселів, у якій всі інтенсивності представлені однаковою кількістю. Число пікселів інтенсивності кожного значення дорівнює  , де N, M – розміри зображення, для якого ведеться пошук порогу сегментування, n – кількість інтервалів кумулятивної гістограми.
, де N, M – розміри зображення, для якого ведеться пошук порогу сегментування, n – кількість інтервалів кумулятивної гістограми.
Для гіпотетичного зображення побудуємо нормовану кумулятивну гістограму за формулою:
 (3)
(3)
де  – кількість пікселів (накопичена частота) гіпотетичного зображення в інтервалі інтенсивності 1÷ s.
– кількість пікселів (накопичена частота) гіпотетичного зображення в інтервалі інтенсивності 1÷ s.
Побудуємо функцію різниці між кумулятивними гістограмами реального та гіпотетичного зображень
 (4)
(4)
На рис.1 наведено дві фотографії облич, для яких на рис.2 представлені графіки гістограм, кумулятивних гістограм (пряма – гіпотетичного зображення, криві – зображень облич) та графіки функції  – різниці між кумулятивними гістограмами реального та гіпотетичного зображень.
– різниці між кумулятивними гістограмами реального та гіпотетичного зображень.


а б
Рис.1. Тестові зображення облич

а б в
Рис.2. Гістограми (а), кумулятивні гістограми зображень (б)
та різниці між кумулятивними гістограмами реальних і гіпотетичного зображень (в)
Функцію характеризують особливі точки: екстремуми, точки перегину чи зламу. Виходячи з завдань сегментування, дослідника цікавлять координати екстремальних значень функції, від яких починається зменшення чи збільшення функції і, відповідно, збільшення чи зменшення швидкості наростання частоти. Вважаємо, що координати екстремумів вказують на можливі пороги сегментації зображення. Метод визначення екстремумів подано в роботі [13].
За функцією для першої фотографії знайдено пороги сегментування: 125 – сірого, 33 – чорного. Для другої фотографії, відповідно, 143 та 25. Сегменти зображень подані на рис. 3.



Рис.3. Сегментування сірого і чорного на фотографіях обличчя
До інтенсивності застосуємо такі поняття як фрагмент інтенсивності та сегмент інтенсивності. Фрагментів є 256. Кожен містить пікселі, інтенсивність яких дорівнює номеру фрагмента. Кількість фрагментів можна зменшити, якщо крок фрагментації вибрати більшим за одиницю, тобто 2, 3, 4 тощо. Тоді у фрагменті знаходяться пікселі, інтенсивність яких задовольняє умові
 (5)
(5)
де k – крок фрагмента, s – номер фрагмента,  – інтенсивність пікселя фрагмента.
– інтенсивність пікселя фрагмента.
Сегмент – це послідовність фрагментів, починаючи від першого до заданого. Для кроку k = 1 сегментів є також 256: перший місить один перший фрагмент, другий – перший і другий фрагменти, третій – перший, другий і третій фрагменти і т.д.
Введемо таку ознаку сегмента як густина пікселів. Вона враховує кількість пікселів у сегменті та значення площі фігури, у якій вони розташовані. Фігурою, яка охоплює пікселі, приймаємо, наприклад, коло, квадрат, прямокутник тощо.
Для обчислень приймаємо універсальну фігуру – коло. Для визначення площі обчислюємо математичне сподівання координат пікселів сегмента та їх дисперсію:
 ,
,  ,
,  (6)
(6)
 , (7)
, (7)
де 1÷ s – інтервал фрагментів, що утворюють сегмент,  – кількість пікселів сегмента,
– кількість пікселів сегмента,  ,
,  – математичне сподівання координат пікселів,
– математичне сподівання координат пікселів,  – множини координат пікселів сегмента,
– множини координат пікселів сегмента,  – дисперсія координат пікселів.
– дисперсія координат пікселів.
Після обчислення площі за формулою:
 (8)
(8)
маємо ознаку густини пікселів у сегменті:
 . (9)
. (9)
Знову використаємо поняття гіпотетичного зображення. В даному випадку – це множина пікселів, яка розподілена між сегментами таким чином, що збільшення кожного сегмента на один фрагмент приводить до збільшення густини пікселів на однакову величину. Тобто залежність зміни густини пікселів сегментів від кількості фрагментів є лінійною з певним коефіцієнтом наростання. Теоретично таке зображення можливе, однак на практиці його побудова можлива тільки з допомогою спеціального алгоритму. Зауважимо, що для розгляду методу сегментування гіпотетичне зображення не є потрібним.
Для гіпотетичного зображення побудуємо густину пікселів у сегментах за формулою:
 (10)
(10)
де  – густина пікселів сегмента гіпотетичного зображення в інтервалі інтенсивності 1÷ s,
– густина пікселів сегмента гіпотетичного зображення в інтервалі інтенсивності 1÷ s,  – значення густини пікселів останнього сегмента (повного зображення),
– значення густини пікселів останнього сегмента (повного зображення),  – густина пікселів кожного фрагмента гіпотетичного зображення.
– густина пікселів кожного фрагмента гіпотетичного зображення.
Побудуємо функцію різниці між густинами реального та гіпотетичного зображень:
 (11)
(11)
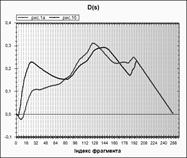
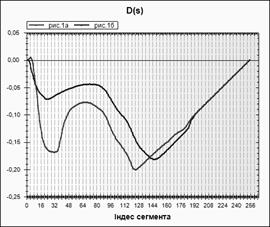
На рис.4 для фотографій пари облич з рис.1 подано графіки густин пікселів сегментів реальних та гіпотетичного зображень, а також залежності функції  .
.
Порогами сегментування на залежностях приймаються координати екстремумів. Мінімум вказує, що до нього відбувалось швидке збільшення густини пікселів сегментів, а після нього швидкість наростання зменшується. Максимум, навпаки, вказує на попереднє повільне наростання і подальше більш швидке наростання. Пошук координат екстремумів здійснюється в двох інтервалах: від чорного до медіани для сегментування чорного, від медіани до білого для сегментування сірого фону. Таким чином, координата екстремуму вказує на інформативну частину зображення, яку можна сегментувати.

а б
Рис.4. Густина пікселів сегментів (а)
та різниці між густинами реальних і гіпотетичного зображень пари облич (б)
Для двох фотографій обличчя за функцією знайдено два пороги сегментванн: перше зображення – 124 (сірого) та 32 (чорного); друге зображення – 147 (сірого), 24 (чорного). Значення порогів близькі до знайдених попереднім методом, сегменти мало відрізняються від наведених на рис.3.
Застосуємо розроблений метод до зображень, взятих з роботи [8]. Зображення, кумулятивні гістограми реальних та гіпотетичних зображень, а також функція різниці кумулятивних гістограм реальних та гіпотетичних зображень представлені на рис. 5.




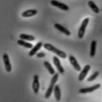
а б в г д
Рис. 5. Тестові зображення.
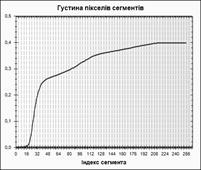


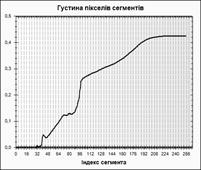



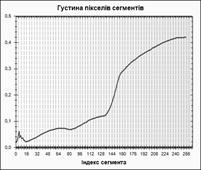

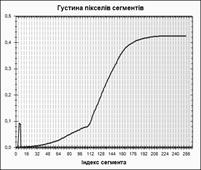

Рис. 6. Різниці кумулятивних гістограм, кумулятивні густини пікселів сегментів
та різниці кумулятивних густин пікселів сегментів
Знайдені для зображень з рис.4 координати екстремумів функції в задачі (11), найближчі до правої границі інтервалу інтенсивності, прийняті порогами сегментування цих зображень (таблиця 1). Сегментовані зображення показані на рис.7.



Рис. 7. Сегментовані зображення з рис.4
Для порівняння результатів сегментування з іншими алгоритмами використано дані з роботи [8]. В таблиці наведені значення порогів сегментування розглянутих зображень, а на рис.8 наведені сегменти, отримані за допомогою вказаних алгоритмів [9-12].
Таблиця 1. Пороги сегментування різними методами
| Зображення | Значення порогів різних методів | |||||
| Otsu | Kwon | KI | Agus-Akira | Кумулятивні гістограми | Кумулятивна густина | |
| “Дельфін” | ||||||
| “Бактерії1” | ||||||
| “Таблиця” | ||||||
| “Предмети” | ||||||
| “Бактерії2” |


Рис.8. Сегментовані зображення за методами із таблиці 1
2.6. Сегментування зображення розбиттям його на частини
Для певних типів зображень відомі алгоритми не заходять адекватного порогу сегментування через фізичну відсутність площини певного рівня інтенсивності, яка б відділяла необхідні сегменти зображення. Розглянемо приклад зображення (рис.3а), в якому методом кумулятивної гістограми неможливо виділити інформаційну частину, наприклад, текст. Прийнявши для порогу координату єдиного екстремуму (мінімума) отримаємо сегмент найбільш темної частини зображення, що на рис.3в. На рис.3г подано також результат сегментування алгоритмом Отцу [ ].
Для даного зображення неможливо знайти коректний сегмент з буквами площиною, паралельною до площини XOY. Про це свідчить зображення, яке ілюструє розподіл інтенсивності у площинах ZOX та ZOY рис. 4.
Рис. 3. Зображення та сегментування
Визначати координату площини січення будемо в межах фрагментів зображення, отриманих в результаті проведення паралельних ліній на поверхні зображення (рис.44 а) або паралельними площинами ZOY (проекція їх на площину ZOX представлена лініями на рис.44б) дозволяє виявити пороги окремих фрагментів і зображення в цілому.
Рис. 3. Проекція інтенсивності зображення та поверхонь сегментування
на площину ZOX
Для цього розділяємо вхідне зображення на частини вертикальними лініями поділу на 7 частин (рис. 4). Максимуми функцій відповідних фрагментів приймаються порогами сегментування: 192, 175, 142, 115, 83, 53, 59.
В останньому фрагменті порогом приймається координата єдиного мінімуму, що розділяє різні швидкості наростання чорного і сірого кольорів.

Рис. 4. Фрагменти зображення та графіки функції для них
Результат по частинного сегментування наведено на рис. 5.

Рис. 5. Зображення з сегментів фрагментів
Вибір кількості фрагментів та спосіб покриття ними поверхні зображення базується на двох взаємно протилежних мотиваціях: збільшення кількості фрагментів збільшує точність алгоритму, але одночасно збільшує складність обчислювального процесу. Додатковою задачею є пошук оптимального покриття. Навіть зупинившись на прямокутній формі фрагментів можливі два випадки: одногабаритні та різногабаритні прямокутники.
Використаємо найпростіший підхід: поверхню зображення покриваємо тільки горизонтальними або вертикальними прямокутниками одна сторона яких має розмір сторони зображення. Другий розмір прямокутника знаходимо нарощуванням початкового прямокутника стовпцями чи рядками на один піксель так, щоб середньоквадратичне відхилення  в межах прямокутника не виходило за межі вказаної величини інтервалу інтенсивності, де
в межах прямокутника не виходило за межі вказаної величини інтервалу інтенсивності, де
 , (4)
, (4)
 – кількість пікселів у прямокутнику,
– кількість пікселів у прямокутнику,  – інтенсивність пікселя,
– інтенсивність пікселя,  – математичне сподівання інтенсивності у прямокутнику,
– математичне сподівання інтенсивності у прямокутнику,  – дисперсія інтенсивності пікселів прямокутнику.
– дисперсія інтенсивності пікселів прямокутнику.
Таким чином, реалізується ітераційна процедура покриття зображення прямокутниками однакової довжини і різної ширини (чи навпаки).
Сегментування при розбитті поверхні зображення на частини. Визначати координату площини січення будемо в межах фрагментів зображення, але тепер отриманих в результаті проведення паралельних площин OZ (проекція їх на площину ZOX представлена лініями на рис.3б) дозволяє виявити gjhjub окремих фрагментів і зображення в цілому.
Рис. 3. Проекція інтенсивності зображення та поверхонь сегментування
на площину ZOX
Для цього розділяємо інтенсивність вхідного зображення на 4 частини лощинами з кроком 60 (рис. 4): 0-60, 60-120, 100-180, 180-255. Для кожного фрагмента застосуємо алгоритм сегментування за кумулятивною гістограмою. Є дві методики з однаковими результатами, але що відрізняються трудоємністю. Перший – це застосування до повного зображення багатофрагментногї моделі кумулятивної гістограми гіпотетичного зображення [ ] або застосування до кожного з фрагментів з рис. Однофрагментної моделі гіпнотичного зображення. Максимуми функцій відповідних фрагментів приймаються порогами сегментування: 192, 175, 142, 115, 83, 53, 59.
В останньому фрагменті порогом приймається координата єдиного мінімуму, що розділяє різні швидкості наростання чорного і сірого кольорів.
Рис. 4. Фрагменти зображення та графіки функції для них
Рис. 4. Фрагменти зображення та графіки функції для них
Результат по частинного сегментування наведено на рис. 5.
Рис. 5. Зображення з сегментів фрагментів
|
|