Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Приведения при вращательном движении механизма
|
|
Приведение МС и МСМ при двигательном режиме работы электропривода. В этом случае поток энергии идет от двигателя к механизму (потери в передачах покрываются за счет мощности, забираемой двигателем из электрической сети) и уравнение баланса мощности будет
РМ = РД ·η,
или уравнение моментов
МСМ · ω М = МС · ω · η,
где η =η 1 · η 2 - общий КПД передаточного устройства.
В зависимости от постановки задачи по уравнению баланса мощности определяются с учетом передаточного числа

момент сопротивления, приведенный к валу двигателя
 ;
;
или статический момент, приведенный к валу рабочей машины

Приведение МС и МСМ при тормозном режиме работы электропривода. В этом случае поток энергии направлен из рабочей машины через передаточное устройство и двигатель в сеть при рекуперативном торможении либо в резисторы при других режимах торможения (потери в передачах покрываются за счет мощности, поступающей от рабочей машины).
Уравнение баланса мощности в этом случае
PД =PM ·η,
или уравнение моментов 
Момент сопротивления, приведенный к валу двигателя, определится, как  ,
,
либо статический момент, приведенный к валу рабочей машины
 .
.
Приведение моментов инерции. Как было указано выше, для приведения моментов инерции необходимо составить уравнение баланса кинетической энергии в системе. При этом общий запас кинетической энергии эквивалентной системы может быть выражен через момент инерции, приведенный к валу двигателя JПР.Д, или через момент инерции, приведенный к валу вращающегося механизма JПР.М.
Уравнение баланса кинетической энергии:
 .
.
Таким образом, для кинематической схемы по рис. 2.7а при приведении моментов инерции к валу двигателя:

откуда приведенный к валу двигателя момент инерции всей системы будет

При приведении к валу механизма уравнение баланса кинетической энергии запишется так:

откуда определяется момент инерции системы, приведенный к валу рабочей машины:

Составляю кинематическую схему с учетом жесткости:












 C1 C2 C3 C4
C1 C2 C3 C4
Рис 3
На рис 3 изображена кинематическая схема с указанием жесткости, где JД – момент инерции двигателя, J1 – момент инерции первой шестерни редуктора, J2 – момент инерции второй шестерни редуктора, J3 – момент инерции третьей шестерни редуктора, J4 – момент инерции четвертой шестерни редуктора, J5 – момент инерции барабана; С1, С2, С3, С4 – жесткости упругих элементов; mг – масса груза.
Система может быть представлена в виде последовательного соединения интегрирующего звена и двух консервативных колебательных звеньев с резонансными частотами Ω 1 и Ω 2. При изменении момента М(р) скачком в системе могут возникать незатухающие колебания с частотами Ω 1 и Ω 2, а в случаях, когда частота возмущающих воздействий совпадает с одной из этих частот, в системе развивается недемпфированный резонанс, при котором амплитуды колебаний теоретически могут возрастать до бесконечности. Реально в системе присутствуют диссипативные силы, которые демпфируют колебания, ограничивая резонансные амплитуды большими, но конечными значениями.
В рассматриваемом примере движущиеся массы соединены 3-мя последовательно соединенными упругими элементами, состоящими из вала ротора двигателя с входным валом редуктора, промежуточного вала редуктора и выходного вала редуктора с валом барабана, а также упругой связью между грузом и двигателем в виде каната.
Составляю расчетную схему трехмассовой системы:
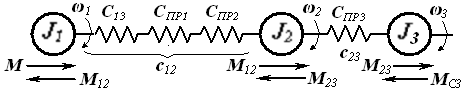
Рис 4
Нахожу приведенные моменты инерции:



Нахожу приведенные жесткости упругих элементов:
 (по условию)
(по условию)





Моделирование трехмассовой системы:
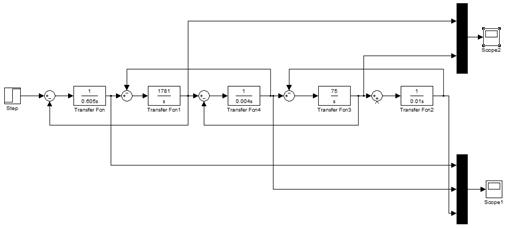
Рис 5
Скорости моделируемой системы: 
Рис 6
Моменты моделируемой системы: 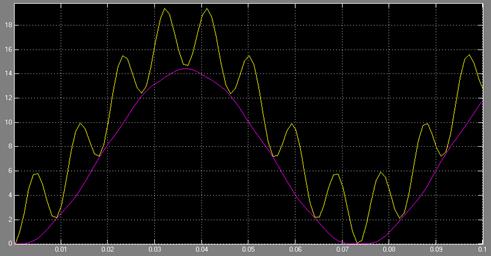
Структурная схема дает представление о механической части электропривода в виде трехмассовой системы как об объекте управления. Управляющим воздействием здесь является электромагнитный момент двигателя М, а возмущающим – момент нагрузки Мс. Регулируемыми переменными могут быть скорости w1, w2, w3, а также нагрузки упругих связей М12 и М23.
Массы элементов и жесткости элементарных связей между ними в кинематической цепи привода различны. Определяющее влияние на движение системы оказывают наибольшие массы и наименьшие жесткости связей.
Исследования кинематики, проведенные с помощью трехмассовой системы, позволяют получить точное значение частоты собственных колебаний всей механической системы, а также скорректировать изменения резонансных частот, чтобы исключить опасные воздействия на человека.
Более детальный анализ свойств упругих механических систем можно провести на основе двухмассовой расчетной схемы.
Составляю расчетную схему двухмассовой системы:
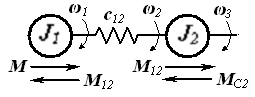
Рис 8



Структурная схема двухмассовой системы:

Рис 9
Скорости моделируемой системы: 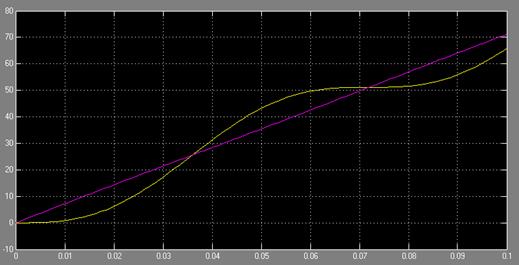
Рис 10
Момент моделируемой системы: 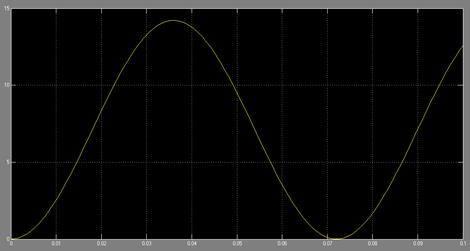
Таким образом, изменение упругого момента во времени имеет колебательный характер с частотой колебаний равной собственной частоте двухмассовой системы. Среднее значение упругого момента при работе с нагрузкой будет равно моменту сопротивления, в то время как мгновенные значения в переходных процессах могут существенно его превышать, создавая дополнительную динамическую нагрузку на двигатель. Помимо этого, негативным влиянием упругих колебаний является то, что они способствуют накоплению усталостных повреждений в элементах механических систем, в результате чего они выходят из строя.
При переходе от трехмассовой к двухмассовой упругой системе выявляется только одна частота Ω 12, на которой возможно проявление механического резонанса. Однако если при этом значение Ω 12 оказывается достаточно близким к одной из парциальных частот исходной системы Ω 1 или Ω 2, можно полагать, что двухмассовая система правильно отражает главные особенности механической части электропривода.
Движение первой массы при небольших частотах колебаний управляющего воздействия М, определяется суммарным моментом инерции электропривода JΣ , причем механическая часть ведет себя как интегрирующее звено. В частности, при М=const скорость w1 изменяется по линейному закону, на который накладываются колебания, обусловленный упругой связью.
Преобразованная двухмассовая структурная схема:
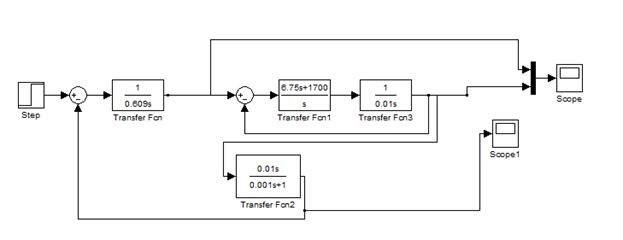
Рис 11
Скорости системы:
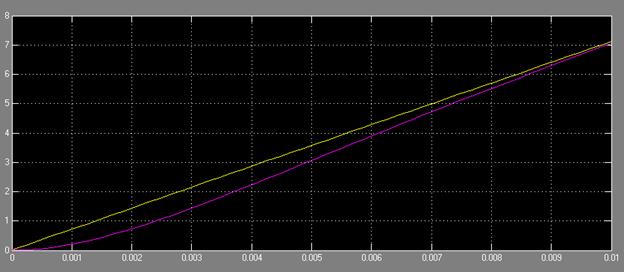
Рис 12
Момент системы:
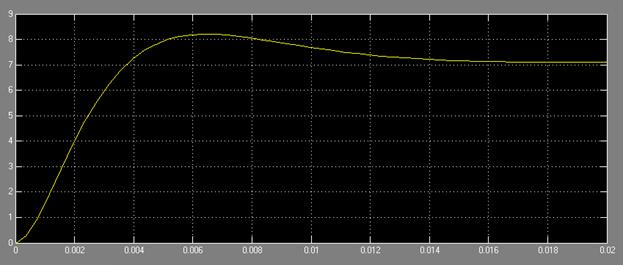
Рис 13
|
|