Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Понятия о переходных процессах в электроприводе
|
|
Переходные процессы в электроприводе возникают при переходе из одного установившегося состояния к другому, когда изменяются скорость, момент, ток двигателя. Внешней причиной возникновения этих процессов являются управляющие и возмущающие воздействия: изменения питающего напряжения, его частоты, нагрузки на валу, момента инерции, магнитного потока, сопротивлений в целях двигателей и т. д.
Реакция привода на возмущающее или управляющее воздействия составляет суть переходных процессов. Внутренней причиной, обуславливающей переходные процессы, являются инерционности электропривода механическая и электромагнитная. Изменение запаса кинетической энергии  и электромагнитной энергии
и электромагнитной энергии  в элементах его электрических цепей происходит во времени, что объясняет возникновение переходимых процессов даже при скачкообразном изменении управляющих и возмущающих воздействий.
в элементах его электрических цепей происходит во времени, что объясняет возникновение переходимых процессов даже при скачкообразном изменении управляющих и возмущающих воздействий.
В качестве простейших примеров рассмотрим ряд переходных процессов в механической части электропривода, представленной жестким механическим звеном (см. рис. 2.2, в).
5.2. Механические переходные процессы при  ,
, 

В соответствии с уравнением движения электропривода
в механической части электропривода действуют два момента: электромагнитный момент двигателя  и момент статистических сопротивлений
и момент статистических сопротивлений  , приведенный к валу двигателя. Результатом их взаимодействия является динамический момент
, приведенный к валу двигателя. Результатом их взаимодействия является динамический момент
 .
.
Для определенности математического описания движения электропривода одно из двух возможных направлений вращения двигателя принимается за положительное. Тогда, если на рассматриваемом интервале времени направления момента и скорости двигателя совпадают, т. е. момент и скорость имеют одинаковые знаки, то работа совершается за счет двигателя (двигательный режим). В противном случае, когда знаки момента и скорости различны, то двигатель потребляет механическую энергию с вала (тормозной режим). Таким образом, в уравнении движения электропривода перед может стоять знак «+» или «–».
Момент статистических сопротивлений, как было отмечено в 1.1, имеют разную природу: реактивные моменты всегда противодействуют движению, активные моменты могут препятствовать или способствовать движению, т. е. перед может стоять знак «–» или «+». Тогда уравнение движения электропривода одномассовой системы с учетом знаков моментов может быть записано в виде
 . (5.1)
. (5.1)
Знак и величина динамического момента являются результатом взаимодействий и . В связи с чем различают следующие режимы работы электропривода
1)  , т. е.
, т. е.  , что соответствует разгону двигателя при
, что соответствует разгону двигателя при  и торможению двигателя при
и торможению двигателя при  ;
;
2)  , т. е.
, т. е.  , что соответствует торможению при
, что соответствует торможению при  > 0 и разгону при < 0;
> 0 и разгону при < 0;
3)  , т. е.
, т. е.  , что соответствует установившемуся режиму при
, что соответствует установившемуся режиму при  .
.
На рис. 5.1. приводятся  ,
,  ,
,  ,
,  на различных этапах движения механической части электропривода при реактивном (см. рис. 5.1, а) и активном (см. рис. 5.1, б),
на различных этапах движения механической части электропривода при реактивном (см. рис. 5.1, а) и активном (см. рис. 5.1, б),  .
.
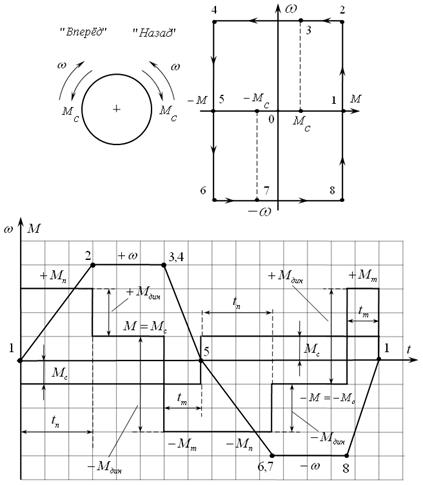
Рис. 5.1, а. Схема движения, идеализированные механические характеристики  и кривые
и кривые  ,
,  при реактивном моменте статистического сопротивления
при реактивном моменте статистического сопротивления
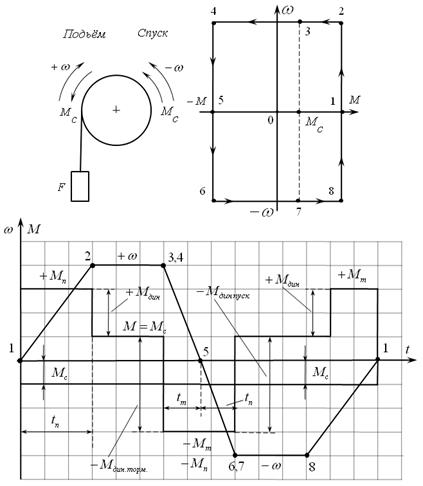
Рис. 5.1, б. Схема движения, идеализированные механические характеристики  и кривые , при активном моменте статистического сопротивления
и кривые , при активном моменте статистического сопротивления
Как видно из приведенных графиков, на всех этапах переходных процессов , тогда как динамические моменты при пуске и торможении различны.
Самостоятельно предлагается проанализировать движение механической части, когда на всех этапах движения (кроме установившегося, где  )
)  .
.
|
|