Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Динамические свойства
|
|
Полученная в предыдущем параграфе система уравнений (3.1) может быть использована для описания динамических режимов процесса электромеханического преобразования энергии в асинхронном двигателе. Однако, как отмечалось, она является существенно нелинейной и даже после преобразований на ее основе получаются громоздкие, неудобные уравнения. Для практического применения используют упрощенные линеаризованные уравнения математической модели АД, которые получают путем преобразования системы уравнений (3.1), дополнив ее уравнением движения (1.14) и воспользовавшись известными методами линеаризации при малых отклонениях координат относительно точки установившегося режима. Работа эта довольно трудоемкая, требующая ряда дополнительных преобразований и упрощений, поэтому, опуская промежуточные преобразования, сразу представим упрощенную линеаризованную структурную схему двигателя, работающего на рабочем участке механической характеристики, при управлении частотой – рис. 3.10, где обозначено
(3.32)
β =2 M к/(ω 0ном s к), T э=1/(ω 0ном s к).
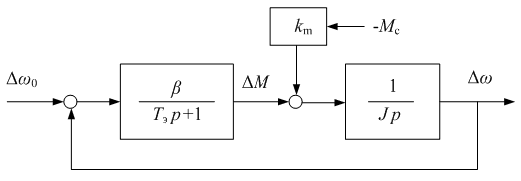
Рис. 3.10. Структурная схема динамической модели
асинхронного двигателя при частотном управлении
Сравнивая (рис. 2.10) и (рис. 3.10), можно отметить, что при частотном управлении асинхронный двигатель, как динамическая система, является полным аналогом коллекторного двигателя независимого возбуждения при якорном управлении, и все уравнения и выводы о характере переходных процессов для коллекторного двигателя справедливы и в данном случае, но при других значениях коэффициентов. Например, передаточные функции по управлению и возмущению соответственно имеют вид (2.45.а) и (2.47.а), если в них принять
k ω =1, km ≈ ω 1/ M 1, T я= T э, T м= J /β,
где ω 1, M 1 – соответственно скорость и момент в точке, относительно которой рассматриваются отклонения.
|
|