Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Динамическое торможение с возбуждением от источника постоянного тока
|
|
Такое торможение осуществляется путем отключения обмотки статора от сети переменного тока и подключения ее к источнику постоянного тока, например, по одной из представленных на рис. 3.6. схем.
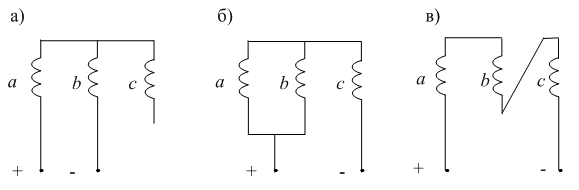
Рис. 3.6. Схемы подключения обмотки статора к источнику постоянного тока
Если обмотку статора подключить к источнику постоянного тока, то в воздушном зазоре двигателя образуется синусоидальное распределенное по расточке статора и неподвижное в пространстве электромагнитное поле. При вращении ротора проводники его обмотки будут пересекать неподвижное поле статора, и в них будет наводиться э.д.с. Под действием этой э.д.с. по обмотке ротора потечет ток, который образует также неподвижное в пространстве поле ротора. В результате взаимодействия неподвижных полей ротора и статора возникает тормозной момент.
Для того чтобы получить уравнения электромеханических характеристик двигателя в режиме динамического торможения, выраженные через те же параметры что и для двигательного режима, от реальной физической модели, которую мы представили выше, переходят к виртуальной модели, которую опишем. Первое предположение – двигатель питается не от источника постоянного тока, а от трехфазного источника переменного тока, обеспечивающего некоторый эквивалентный ток, создающий ту же м.д.с., что и реальный источник постоянного тока. Эквивалентный ток определяется из следующих соображений.
Амплитуда м.д.с., создаваемая переменным током, определяется соотношением
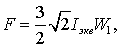
где w 1 – число витков фазы статора. М.д.с. статорной обмотки, подключенной к источнику постоянного тока, например по схеме рис. 3.6.а, определяется соотношением:

Из условия равенства м.д.с. в обоих случаях, найдем

Так как переменный ток в статоре виртуальной модели создает вращающееся поле, а в реальном двигателе оно неподвижно, будем считать, что статор модели вращается навстречу полю с той же скоростью – поэтому его поле неподвижно в пространстве. Если проследить за процессом разгона статора против поля, то можно понять, что модель переходит на генераторный участок механической характеристики, см. рис. 3.4, в режим рекуперативного торможения.
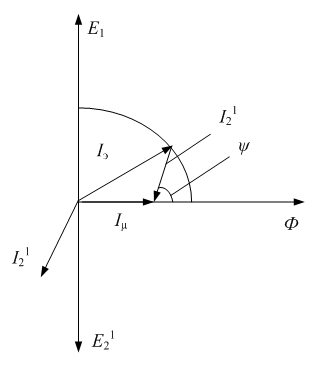
Рис. 3.7. Векторная диаграмма двигателя в режиме динамического торможения
Принимая во внимание что статорная обмотка подключена к источнику тока, векторная диаграмма двигателя имеет вид рис. 3.7, где обозначено E 1, E 2 ' – соответственно векторы э.д.с. статора и приведенной обмотки ротора. Ток намагничивания I μ определяется геометрической суммой векторов приведенного вторичного – I 2 ' и эквивалентного тока I э. С понижением скорости ротора уменьшается вторичный ток и его фазовый сдвиг относительно э.д.с. E 2 '. Напомним, что при этом модуль вектора эквивалентного тока постоянен. Поэтому при уменьшении скорости конец вектора тока I э будет перемещаться по окружности по часовой стрелке и при заторможенном роторе совпадет с вектором I μ . Следовательно, на малых скоростях двигатель оказывается сильно насыщен, а при больших – нет. Из векторной диаграммы имеем
(3.16)
I э2=(I 2 ')2+2 I μ I 2 ' sinΨ 2+(I μ )2;
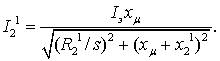
(3.17)

где E 20 ' – приведенная вторичная э.д.с. при синхронной скорости двигателя и намагничивающем токе I μ , которая может быть найдена по кривой намагничивания двигателя, s =ω /ω 0 – скольжение при динамическом торможении.
Решая совместно (3.16) и (3.17), находим
(3.18)
Механическая характеристика запишется выражением, аналогичным по структуре механической характеристике для двигательного режима,
(3.19)
M (s)=2 M кт/(s / s кт+ s кт/ s),
где
(3.20)
M кт=3 I э2 x μ 2/(2ω 0(x μ − x 2 '))
момент критический в режиме динамического торможения,
(3.21)
s кт= R 2 ' /(x 1+ x 2 ')
критическое скольжение в режиме динамического торможения.
Общий вид характеристик представлен на рис. 3.8.

Рис. 3.8. Механическая характеристика асинхронного двигателя
в режиме динамического торможения
Выражения (3.18), (3.19) показывают, что нам удалось выразить электромеханические характеристики в режиме динамического торможения при возбуждении двигателя постоянным током через те же параметры, что и в двигательном режиме при питании от сети переменного тока – (3.7), (3.13).
|
|