Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Механическая и электромеханическая характеристики асинхронных двигателей.
|
|
Для вывода уравнения механической характеристики воспользуемся упрощенной схемой замещения двигателя (см. рис. 3.3), где обозначено:  – фазное напряжение;
– фазное напряжение;  – фазный ток статора и приведенный фазный ток ротора соответственно;
– фазный ток статора и приведенный фазный ток ротора соответственно;  – ток намагничивания, приблизительно равный току холостого хода двигателя; x 1, x 2 ' – индуктивное сопротивление рассеяния обмотки статора и приведенное индуктивное сопротивление обмотки ротора; R 1, R 2 ' – активное сопротивление обмотки статора и приведенное сопротивление обмотки ротора; R μ , x μ – активное и реактивное сопротивление контура намагничивания, которые определяются параметрами взаимоиндукции статорной и роторной цепей.
– ток намагничивания, приблизительно равный току холостого хода двигателя; x 1, x 2 ' – индуктивное сопротивление рассеяния обмотки статора и приведенное индуктивное сопротивление обмотки ротора; R 1, R 2 ' – активное сопротивление обмотки статора и приведенное сопротивление обмотки ротора; R μ , x μ – активное и реактивное сопротивление контура намагничивания, которые определяются параметрами взаимоиндукции статорной и роторной цепей.
C 1≈ 1+ x 1/ x μ ≈ 1,
где C 1 – модуль комплексного коэффициента, характеризующего соотношение сопротивлений статорной цепи и цепи контура намагничивания.
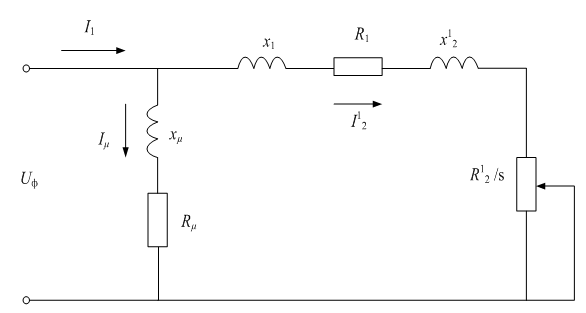
Рис. 3.3. Схема замещения асинхронного двигателя
В соответствии со схемой замещения можно получить выражение для тока ротора:
(3.7)
Электромагнитная мощность, передаваемая через воздушный зазор, определяется выражением
P э= M ω 0,
где M – момент на валу двигателя. Механическая мощность на валу двигателя определяется выражением
P = M ω.
Потери мощности в цепи ротора представим в виде
(3.8)
Δ P = P э− P = M (ω 0− ω)= M · s ω 0.
С другой стороны, потери мощности в цепи трехфазного ротора определяются выражением
(3.9)
Δ P =3(I 2 ')2 R 2 '.
Выразим момент двигателя через ток ротора и подставив I 2 ' из (3.7), получим
(3.10)
M (s)=3 U ф2 R 2 ' /[ω 0 s ((R 1+ R 2 ' / s)2+(x 1+ x 2 ')2)].
Выражение (3.10) является механической характеристикой асинхронного двигателя. Нетрудно заметить, что при s → 0 и при s → ∞ момент M → 0, следовательно, функция момента имеет максимум. Известным способом, из уравнения ∂ M /∂ s =0 определим значение критического скольжения s к, при котором двигатель развивает максимальный (критический) момент:
(3.11)
где
x к= x 1+ x 2 '.
Подставляя полученное значение s к в (3.10), получим выражение для критического момента
(3.12)
Здесь знак «+» соответствует двигательному режиму, а знак «–» – генераторному.
Если выражение (3.10) разделить на (3.12), то после преобразований получим уравнение приведенной механической характеристики
(3.13)
M (s)=2 M к(1+ as к)/(s / s к+ s к/ s +2 as к).
где a = R 1/ R 2 '.
 Рис. 3.4. Механическая и электромеханическая характеристики асинхронного двигателя
Рис. 3.4. Механическая и электромеханическая характеристики асинхронного двигателя
Механическая характеристика, соответствующая (3.13), представлена на рис. 3.4.а. Она имеет несколько характерных точек:
1. s =0, M =0 – точка холостого хода, скорость равна синхронной;
2. s = s н, M = M н – точка номинального режима, скорость равна номинальной;
3. s = s кд, M = M кд – точка максимального момента в двигательном режиме;
4. s =− s кг, M = M кг – точка максимального момента в генераторном режиме;
5. s =1, M = M п – точка пускового режима.
Существуют асинхронные двигатели, у которых механическая характеристика дважды меняет знак жесткости. Тогда выделяют точки минимального момента для двигательного и генераторного режимов.
|
|