Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Б) Метод последовательного соединения катушки
|
|
Как известно из электротехники, при согласном последовательном включении двух катушек их общая индуктивность Lа = L1 + L2 + 2M; ее можно определить одним из методов измерения индуктивности, например методом амперметра и вольтметра применяя формулу
Lа = (1/ω) √ z2а – (r1 + r2)2, где zа – полное сопротивление цепи двух катушекпри согласном последовательном соединении их.
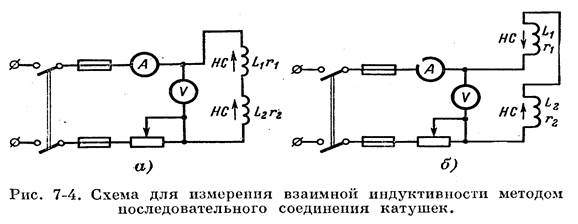 |
При встречном последовательном соединении двух катушек их общая индуктивность
Lб = L1 + L2 – 2M.
Индуктивность Lб можно определить теми же методами что и индуктивность La, в частности методом амперметра и вольтметра, применяя формулу
Lб = (1/ω) √ z2б – (r1 + r2)2, где zб – полное сопротивление цепи двух катушекпри встречном последовательном соединении их.
Вычитая из а б получаем Lа - Lб = 4М, откуда М = (Lа – Lб)/4.
Наиболее часто для измерения индуктивности применяются мостовые методы Мосты для измерения индуктивности. Катушка индуктивности, параметры которой измеряются, включается в одно из плеч четырехплечего моста, например в первое плечо
Z1 = R1 j. ω L1 Чтобы мост можно было уравновесить, по крайней мере, одно из оставшихся плеч должно содержать реактивность в виде индуктивности или емкости. Предпочтение отдают последней, так как катушки индуктивности по точности изготовления уступают конденсаторам, а стоят значительно дороже. Схема такого моста показана на рис. 11.17. Здесь
Z2 = R2; Z3 = R3; Z4 = R4/(1+j ω R4 C4)
 |
Добротность катушки Qвыражается через найденные значения R1, L1или значения R4, С4:
Q = ω L1/C1= ω R4C4.
Уравновешивается такой мост регулировкой R3и R4. Значение R3 пропорционально индуктивности, a R4— добротности измеряемой катушки.
Недостаток рассмотренной схемы — плохая сходимость моста при измерении параметров катушек с низкой добротностью. Если Q = l, процесс уравновешивания уже затруднен, а при
Q < 0, 5 уравновешивание моста практически невозможно.
Измерение параметров катушек индуктивности с низкой добротностью производится с помощью шестиплечего моста (рис. 11.18). Условия равновесия такого моста можно найти следующим образом: треугольник, образованный элементами R4, R5и С, преобразуют в звезду, при этом мост становится четырехплечим, уравнение равновесия которого уже знакомо. После преобразовании находим два условия равновесия моста:
 R1 = R2R3/ R4; L1=[R2R3 + R5(R1 + R2)].
R1 = R2R3/ R4; L1=[R2R3 + R5(R1 + R2)].
Мост уравновешивается регулировкой R4 и R5. Первоначально регулировкой R4достигается выполнение первого условия равновесия моста, а затем регулировкой R5— второго. Сопротивление R5не входит в первое условие, поэтому регулировка не нарушает его хорошей сходимости.
Схема шестиплечего моста для измерения
параметров катушек индуктивности.
|
|