Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Описание экспериментальной установки. Измерение и использование метода крутильных колебаний на трифилярном подвесе для измерения моментов инерции твердых тел
|
|
Лабораторная работа №7
ИЗМЕРЕНИЕ МОМЕНТОВ ИНЕРЦИИ ТВЕРДЫХ ТЕЛ С ПОМОЩЬЮ ТРИФИЛЯРНОГО ПОДВЕСА
ЦЕЛЬ РАБОТЫ
Измерение и использование метода крутильных колебаний на трифилярном подвесе для измерения моментов инерции твердых тел. Проверка теоремы Штейнера.
ОПИСАНИЕ ЭКСПЕРИМЕНТАЛЬНОЙ УСТАНОВКИ
Предварительно необходимо изучить теоретические основы работы №5.
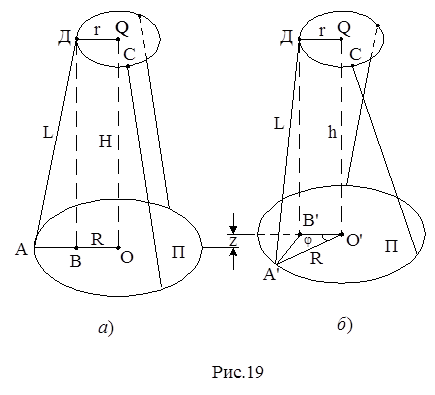 |
Трифилярный подвес в положении равновесия показан на рис.19а. Платформа П подвешена на трех нитях, прикрепленных к платформе в вершинах равностороннего треугольника. Верхние концы нитей прикреплены к неподвижной шайбе С также в вершинах равностороннего треугольника. Треугольники вписаны в окружности, соответственно, радиусов R и r. Центры окружностей О и Q лежат на вертикальной оси. В положении равновесия расстояние между платформой П и шайбой С равно Н, а сила тяжести платформы П уравновешена силами натяжения трех нитей. При повороте платформы на угол j от положения равновесия ее нити подвеса перекручиваются и их силы натяжения создают момент сил, стремящийся повернуть платформу в положение равновесия, а сама платформа поднимается на высоту z (рис.19). В результате платформа П начинает совершать крутильные колебания.
При крутильных колебаниях платформы П ее отклонение от положения равновесия характеризует угол j. Если силами сопротивления движению можно пренебречь, то колебания становятся гармоническими:
 , (1)
, (1)
где jm - амплитуда угла поворота; t - время колебаний;
Т - период колебаний; a0 - начальная фаза.
Угловую скорость w платформы П найдем дифференцированием j по времени:
 . (2)
. (2)
Из формулы (2) следует, что амплитуда угловой скорости равна  . (3)
. (3)
При крутильных колебаниях платформы П происходит переход кинетической энергии вращательного движения платформы  в потенциальную энергию подъема платформы относительно положения равновесия
в потенциальную энергию подъема платформы относительно положения равновесия
ЕР = mgz и наоборот. Механическая энергия крутильных колебаний Е равна сумме кинетической и потенциальной энергий: Е = Ek + Ер.
В момент прохождения платформы П через положение равновесия ЕР = 0, а кинетическая энергия Ek максимальна и равна полной энергии. С учетом формулы (3) получим
 . (4)
. (4)
В момент отклонения платформы П на максимальный угол jm она поднимается на максимальную высоту zm от положения равновесия, а кинетическая энергия равна 0. Энергия колебаний Е равна максимальной потенциальной энергии:
 . (5)
. (5)
Обозначим длину нитей подвеса буквой L. Из DАДВ (рис.19а) следует  , (6)
, (6)
а из DА¢ ДВ¢ и D А¢ В¢ О¢ (см.рис.19б) получим
 . (7)
. (7)
Вычитая уравнение (7) из уравнения (6), найдем
 или
или
 . (8)
. (8)
При малых углах отклонения j, т.е. при выполнении условия z< < H,  ,
,  , уравнение (8) принимает вид:
, уравнение (8) принимает вид:
 . (9)
. (9)
Соответственно для максимальных высоты подъема zm и угла отклонения jm из уравнения (9) следует
 . (10)
. (10)
Тогда  . (11)
. (11)
Подставляя формулу (11) в формулу (5), получим энергию крутильных колебаний
 . (12)
. (12)
Приравнивая формулы (4) и (12), определяющие механическую энергию крутильных колебаний, получим уравнение
 ,
,
из которого найдем момент инерции платформы П относительно вертикальной оси OQ
 , (13)
, (13)
где t - время n полных колебаний платформы П.
Определяя момент инерции I по формуле (13), полуширину доверительного интервала DI (абсолютную погрешность) вычисляют с помощью формулы:
 , (14)
, (14)
т.е. DI = IE, где Е - относительная погрешность момента инерции I, а Dt, Dm, …, DH - абсолютные погрешности соответствующих величин.
При экспериментальном измерении момента инерции Ik тела с номером k сначала наблюдают колебания ненагруженной платформы П и по формулам (13) и (14) находят момент инерции пустой платформы I0 и полуширину доверительного интервала DI0. Далее испытуемое тело помещают в центр платформы П и повторяют измерения для платформы с телом, а с помощью формул (13) и (14) определяют момент инерции платформы с телом I0k и полуширину доверительного интервала DI0k. Тогда момент инерции одного тела равен
Ik = I0k - I0, к=1, 2, (15)
а полуширина доверительного интервала DIk определяется формулой
 . (16)
. (16)
|
|