Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Динамическое торможение. Для осуществления динамического торможения обмотка статора отключается от сети переменного тока и подключается к источнику постоянного тока (рис
|
|
Для осуществления динамического торможения обмотка статора отключается от сети переменного тока и подключается к источнику постоянного тока (рис. 1.3). Постоянный ток, протекающий в обмотке статора, создает неподвижный в пространстве магнитный поток. Величина постоянного тока, подводимого к статору асинхронного электродвигателя, обычно ограничивается сопротивлением динамического торможения Rд В обмотках вращающегося по инерции ротора наводится ЭДС, которая вызывает появление
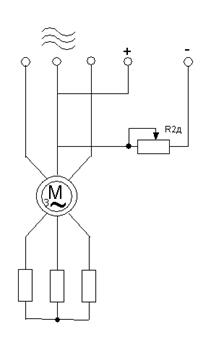
Рис. 1.3. Схема динамического торможения АД
тока в роторной цепи. Взаимодействие тока ротора с неподвижным магнитным потоком статора создает тормозной момент, значение которого определяется выражением
 , (1.11)
, (1.11)
где I ЭКВ - эквивалентный ток обмотки статора, равный для заданной схемы включения обмоток  ;
;
I П - постоянный ток, потребляемый обмоткой статора, I П=(2Q3) I m;
 - текущее значение скольжения при динамическом торможении.
- текущее значение скольжения при динамическом торможении.
Из уравнения (1.11) видно, что момент при динамическом торможении зависит от I ЭКВ, протекающего по обмотке статора, и является функцией относительной скорости вращения ротора S ' = w.
Исследуя полученное значение тормозного момента на экстремумы, найдем, что М К ДТ будет иметь место при
 , (1.12)
, (1.12)
а значение критического момента
 . (1.13)
. (1.13)
С учётом полученных выражений для критического скольжения и критического момента можно вывести уравнение механической характеристики для режима динамического торможения, т. е.
 . (1.14)
. (1.14)
На рис. 1.4 изображены механические характеристики при динамическом торможении для трех различных добавочных сопротивлений в роторе и для двух значений постоянного тока в цепи статора.
Из анализа кривых (рис. 1.4) видно, что при изменении добавочного сопротивления
|
в цепи ротора изменяется и среднее значение тормозного момента. Следовательно, имеется оптимальное значение сопротивления, при котором имеет место максимальный тормозной момент при заданном значении постоянного тока и минимальное время торможения.
|
|