Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
На малюнку представлена принципова електрична схема
|
|
підсилювального каскаду на біполярному тирмисторі із загальним емітером
підсилювального каскаду на біполярному транзисторі із загальним емітером
підсилювального каскаду на біполярному тиристорі із загальним емітером
підсилювального каскаду на біполярному трансформаторі із загальним емітером
35. Суттєвим недоліком транзисторів є залежність їх параметрів від:
повітря
температури
психологічного стану
частоти
36. Виконавчим механізмом називається –
пристрій, що перетворює керуючий сигнал регулятора в переміщення регулювального органа
пристрій, який сприймає різницю між поточним і заданим значеннями регульованої величини та перетворює її у вплив на регулювальний орган відповідно до закладеного в регулятор закону регулювання
пристрій, що дозволяє змінювати напрямок або витрату потоку речовини або енергії відповідно до вимог технологічного процесу
пристрій, що характеризується залежністю між вихідний і вхідний величинами в усталеному та перехідному режимах
37. Регулювальним органом називається –
пристрій, який сприймає різницю між поточним і заданим значеннями регульованої величини та перетворює її у вплив на регулювальний орган відповідно до закладеного в регулятор закону регулювання
пристрій, що дозволяє змінювати напрямок або витрату потоку речовини або енергії відповідно до вимог технологічного процесу
пристрій, що характеризується залежністю між вихідний і вхідний величинами в усталеному та перехідному режимах
пристрій, що перетворює керуючий сигнал регулятора в переміщення регулювального органа
38. Пристрій, який складається з виконавчого двигуна, передатного або перетворюючого вузла, а також систем захисту, контролю та сигналізації положення вихідного елемента, блокування та відключення, називається
автоматичним регулятором
виконавчим механізмом
регулювальним органом
вимірювальним перетворювачем
39. Класифікація виконавчого механізму по виду споживаної енергії:
електродвигунні
електромагнітні
пневматичні
гідравлічні
40. Класифікувати виконавчий механізм по виду споживаної енергії за представленим малюнком
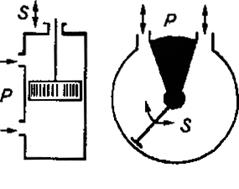
гідравлічні
електродвигунні
пневматичні
електромагнітні
41. Класифікувати виконавчий механізм по виду споживаної енергії за представленим малюнком
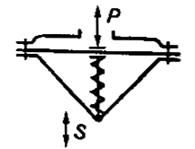
пневматичні
гідравлічні
електромагнітні
електродвигунні
42. Класифікувати виконавчий механізм по виду споживаної енергії за представленим малюнком

пневматичні
гідравлічні
електромагнітні
електродвигунні
43. Класифікувати виконавчий механізм по виду споживаної енергії за представленим малюнком

електромагнітні
електродвигунні
гідравлічні
пневматичні
44. Електромагнітні муфти можуть бути
асинхронними
порошковими
синхронними
фрикційними
45. Регулювальні органи поділяються на типи:
дросельного типу
масового типу
швидкісного типу
об'ємного типу
46. Регулювальні органи, які змінюють витрату середовища за рахунок зміни її обсягу
масового типу
дросельного типу
швидкісного типу
об'ємного типу
47. Регулювальні органи, які змінюють продуктивність за рахунок зміни своєї частоти обертання
масового типу
дросельного типу
швидкісного типу
об'ємного типу
48. Регулювальні органи, які змінюють витрату речовини за рахунок зміни швидкості та площі перетину потоку рідини або газу при проходженні його через дроселюючий пристрій, гідравлічний опір якого — змінна величина
дросельного типу
масового типу
об'ємного типу
швидкісного типу
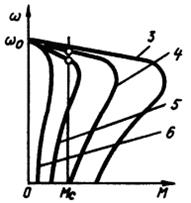
49. До якого способу регулювання відносяться дані механічні характеристики:
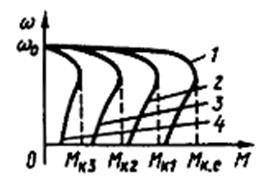
включення додаткових резисторів R2д у ланцюг ротора
зміна числа пар полюсів
зміна напруги живлення статора АД
включення додаткових резисторів R1д у ланцюг статора
50. До якого способу регулювання відносяться дані механічні характеристики:
включення додаткових резисторів R1д у ланцюг статора
зміна числа пар полюсів
зміна напруги живлення статора АД
включення додаткових резисторів R2д у ланцюг ротора
51. До якого способу регулювання відносяться дані механічні характеристики:
зміна числа пар полюсів
зміна напруги живлення статора АД
включення додаткових резисторів R1д у ланцюг статора
включення додаткових резисторів R2д у ланцюг ротора
52. Аналіз характерних крапок штучних механічних характеристик: швидкість холостого ходу  не змінюється; крапки екстремуму Мк і sк – зменшуються, як і пусковий момент. До якого способу регулювання координат АД відноситься даний аналіз.
не змінюється; крапки екстремуму Мк і sк – зменшуються, як і пусковий момент. До якого способу регулювання координат АД відноситься даний аналіз.
зміна напруги живлення статора АД
включення додаткових резисторів R1д у ланцюг статора
включення додаткових резисторів R2д у ланцюг ротора
зміна числа пар полюсів
53. Аналіз характерних крапок штучних механічних характеристик: швидкість холостого ходу  не змінюється; не впливає на критичне ковзання sk, але суттєво змінює критичний момент Мк. До якого способу регулювання координат АД відноситься даний аналіз.
не змінюється; не впливає на критичне ковзання sk, але суттєво змінює критичний момент Мк. До якого способу регулювання координат АД відноситься даний аналіз.
включення додаткових резисторів R1д у ланцюг статора
включення додаткових резисторів R2д у ланцюг ротора
зміна числа пар полюсів
зміна напруги живлення статора АД
54. Аналіз характерних крапок штучних механічних характеристик: швидкість холостого ходу  не змінюється; пусковий момент можна підвищувати до критичного значення Мкпри одночасному зниженні пускового струму; критичний момент Мк залишається незмінним. До якого способу регулювання координат АД відноситься даний аналіз.
не змінюється; пусковий момент можна підвищувати до критичного значення Мкпри одночасному зниженні пускового струму; критичний момент Мк залишається незмінним. До якого способу регулювання координат АД відноситься даний аналіз.
включення додаткових резисторів R1д у ланцюг статора
зміна напруги живлення статора АД
включення додаткових резисторів R2д у ланцюг ротора
зміна числа пар полюсів
|
|