Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Двухфазные асинхронные микродвигатели
|
|
По сравнению с асинхронными микродвигателями общего применения исполнительные микродвигатели имеют повышенное активное сопротивление ротора. Это связано с требованиями обеспечения устойчивой работы исполнительных микродвигателей во всем рабочем диапазоне угловых скоростей (скольжение s = 0÷ 1) и исключения параметрического самохода. Из теории асинхронных машин известно, что устойчивость их работы практически при всех реальных видах нагрузки обеспечивается только на участке от s = 0 до s = sк (sк – критическое скольжение).
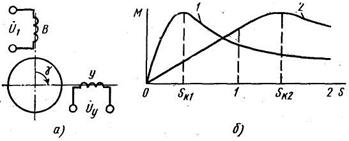
Рис. 2.1
Следовательно, активное сопротивление ротора у исполнительного асинхронного микродвигателя должно быть таким, чтобы обеспечивалось условие sк ≥ 1. Условие sк > 1, как будет показано далее, является необходимым и для отсутствия параметрического самохода, который может возникнуть при неправильном выборе параметров двигателя. Критическое скольжение реальных исполнительных асинхронных микродвигателей выбирают обычно в пределах sк = 2÷ 4.
На рис. 2.1, б представлены зависимости вращающего момента от скольжения асинхронного микродвигателя общего применения (кривая 1) и исполнительного асинхронного микродвигателя (кривая 2).
В зависимости от конструкции ротора различают три основных типа исполнительных асинхронных микродвигателей: с короткозамкнутым ротором типа «беличья клетка», с полым немагнитным и полым ферромагнитным роторами.
Исполнительные асинхронные микродвигатели с ротором типа «беличья клетка» имеют такое же устройство, как и трехфазный асинхронный двигатель с аналогичным ротором. Отличие состоит только в том, что в настоящее время их выпускают в основном так называемой сквозной конструкции. При такой конструкции (рис. 2.2) внутренний диаметр статора 1, на котором расположена двухфазная обмотка 2, равен наружному диаметру подшипников 5. Это позволяет обрабатывать внутреннюю поверхность статора и отверстия под подшипники в подшипниковых щитах 4 с одной установки на станке. Тем самым уменьшается эксцентриситет расположения ротора 3 в расточке статора, что дает возможность уменьшить минимально допустимый воздушный зазор до 0, 03 – 0, 05 мм. Уменьшение воздушного зазора при неизменных габаритных размерах и магнитном потоке обеспечивает снижение намагничивающего тока и, следовательно, уменьшение электрических потерь в статоре, повышение к.п.д. и коэффициента мощности cos φ 1. И наоборот, при неизменных габаритных размерах, намагничивающей составляющей м.д.с. статора и электрических потерях в обмотке статора, т. е. при одинаковых условиях нагрева двигателя, уменьшение воздушного зазора дает возможность увеличить основной магнитный поток (при отсутствии насыщения) и тем самым вращающий момент.
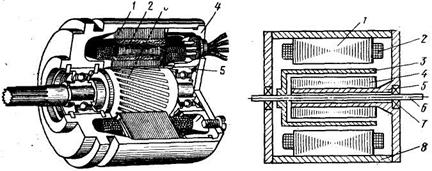
Рис. 2.2 Рис. 2.3
В системах автоматики широко применяются исполнительные микродвигатели с полым немагнитным ротором. Конструктивная схема такого микродвигателя представлена на рис. 2.3. Внешний статор 1, закрепленный в корпусе 8, ничем не отличается от статора обычного асинхронного микродвигателя. Его набирают из листов электротехнической стали, изолированных друг от друга. В пазах статора располагают две обмотки 2 – возбуждения и управления, сдвинутые в пространстве на электрический угол 90° (здесь и далее под электрическим углом понимаем пространственный угол, умноженный на число пар полюсов машины). Внутренний статор 4, который набирают из листов электротехнической стали на цилиндрическом выступе одного из подшипниковых щитов 5, служит для уменьшения магнитного сопротивления на пути основного магнитного потока, проходящего через воздушный зазор.
В воздушном зазоре между внешним и внутренним статорами находится полый ротор 3, выполненный в виде тонкостенного стакана из немагнитного материала, чаще всего из сплавов алюминия. Дно ротора жестко укрепляют на валу 6, который вращается в подшипниках 7, расположенных в подшипниковых щитах. Толщина стенок ротора в зависимости от мощности двигателя колеблется в пределах 0, 1 – 1 мм. Полый ротор имеет очень малую массу и, следовательно, незначительный момент инерции.
В микродвигателях мощностью в единицы ватт и менее обмотки возбуждения и управления часто размещают в пазах внутреннего статора. Тогда внешний статор пазов не имеет и служит лишь для уменьшения магнитного сопротивления. При такой конструкции облегчается процесс укладки обмоток в пазы и несколько повышается вращающий момент, но увеличивается диаметр ротора вследствие увеличения обмоточного пространства на внутреннем статоре, что приводит к некоторому увеличению момента инерции ротора. Возможно также размещение одной из обмоток на внутреннем, а другой – на внешнем статоре.
На рис. 2.4 представлен исполнительный микродвигатель АДП-123 с полым немагнитным ротором 3 и обмотками возбуждения на внешнем статоре 1. Внутренний статор 2 – безобмоточный.
Полый немагнитный ротор исполнительного асинхронного микродвигателя в отличие от роторов других типов обладает незначительным индуктивным сопротивлением, что повышает линейность механических и регулировочных характеристик двигателя.
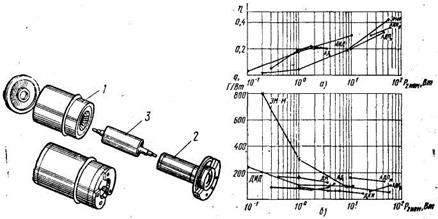
Рис. 2.4 Рис. 2.5
Гладкая цилиндрическая поверхность полого немагнитного ротора способствует снижению уровня шумов, создаваемых двигателем.
Отсутствие радиальных сил притяжения полого немагнитного ротора к статору, уменьшение массы ротора и соответственно момента трения в подшипниках обеспечивают уменьшение напряжения трогания.
Недостатком микродвигателя с полым немагнитным ротором является большой немагнитный зазор, состоящий из двух воздушных зазоров: между внешним статором и ротором и между ротором и внутренним статором (каждый до 0, 25 мм), а также из немагнитной стенки самого ротора.
Из-за большого немагнитного зазора между внешним и внутренним статорами, составляющего 0, 5 – 1, 5 мм, эти двигатели имеют значительный намагничивающий ток (0, 8 – 0, 9 от номинального) и низкий коэффициент мощности. Последний недостаток несколько устраняется при конденсаторном управлении, но большой намагничивающий ток приводит к большим электрическим потерям в обмотках двигателя и значительно снижает его к.п.д. У исполнительных микродвигателей с полым немагнитным ротором мощностью в несколько десятков ватт по сравнению с исполнительными микродвигателями той же мощности с ротором типа «беличья клетка» к.п.д. снижается с 40 – 50 до 20 – 35%, а габаритные размеры и масса увеличиваются в 1, 2 – 2 раза. При увеличении номинальной частоты напряжения питания с 50 до 400 – 1000 Гц габаритные размеры и масса на единицу полезной мощности уменьшаются и эти показатели у указанных типов микродвигателей сближаются. Объясняется это относительным уменьшением активного сопротивления обмоток статора (по сравнению с индуктивным) и электрических потерь в них. Однако и при номинальной мощности менее 5 – 10 Вт габаритно-массовые и энергетические характеристики в основном лучше у микродвигателей с ротором типа «беличья клетка».
На рис. 2.5, а, б приведены зависимости соответственно к.п.д. η и массы q на единицу номинальной мощности от номинальной мощности P2ном некоторых серийных исполнительных асинхронных микродвигателей: АДП – с полым немагнитным ротором (индекс «н» – частота 50 Гц; индекс «в» – частота 400 Гц); ЭМ-М и ДИД – с полым немагнитным ротором (400 Гц); АД, ДМ и ДКИ – с ротором типа «беличья клетка» (400 Гц).
Микродвигатели с полым немагнитным ротором менее надежны при высоких температурах, вибрации и ударах, так как вероятность деформации полого немагнитного ротора в указанных условиях выше, чем ротора типа «беличья клетка».
Уменьшить немагнитный зазор можно при использовании полого ферромагнитного ротора. В этом случае отпадает необходимость во внутреннем статоре, так как магнитный поток замыкается непосредственно по ротору. Чтобы материал ротора не насыщался и активное сопротивление его не было очень велико, полый стакан выполняют более толстостенным. Это приводит к увеличению массы ротора и снижению быстродействия двигателя. У некоторых типов таких микродвигателей с целью уменьшения активного сопротивления ротора его поверхность покрывают тонким слоем меди.
В каждом конкретном случае выбор конструкции типа двигателя должен производиться с учетом основных требований и условий применения.
Принцип действия исполнительного асинхронного микродвигателя не отличается от принципа действия трехфазного асинхронного микродвигателя. Вращающееся магнитное поле статора создается в результате взаимодействия м.д.с. обмоток В и У при наличии пространственного сдвига между ними и временного сдвига приложенных к ним напряжений. Электромагнитный момент возникает в результате взаимодействия вращающегося магнитного поля статора с токами, наведенными этим полем в обмотке ротора – стержнях «беличьей клетки» или стенке полого ротора. Из теории электрических машин известно, что вектор вращающегося магнитного поля остается неизменным, т. е. поле является круговым при соблюдении следующих условий:
1) сдвиг обмоток статора в пространстве на электрический угол γ = 90°;
2) сдвиг токов в обмотке статора по времени на угол β = 90°;
3) равенство м.д.с. обмоток возбуждения и управления: Iуω у.эф = Iвω в.эф, где ω эф – число эффективных витков соответствующей обмотки, равное произведению числа витков на обмоточный коэффициент.
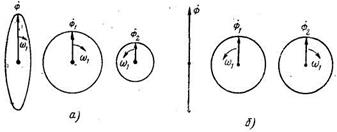
Рис. 2.6
Нарушение любого из этих условий приводит к тому, что поле становится эллиптическим, т. е. конец вектора магнитного потока описывает не окружность, а эллипс. В этом случае суммарное магнитное поле Φ при вращении не остается постоянным, а изменяется по амплитуде. Становится переменной и мгновенная угловая скорость вектора Φ в пределах оборота при неизменной средней скорости.
Эллиптическое поле создает меньший вращающий момент, чем круговое такой же амплитуды. Его можно представить как сумму двух неравных круговых полей, вращающихся с синхронной угловой скоростью в противоположные стороны (рис. 2.6, а). Круговое поле Φ 1, вращающееся в одном направлении с эллиптическим, называют прямым; поле Ф2 – обратным.
Прямое поле создает вращающий момент двигателя, а обратное – тормозящий момент. С увеличением эллиптичности поля за счет изменения углов β и γ или уменьшения м.д.с. одной из обмоток статора прямая составляющая поля и момента убывает, а обратная составляющая растет. Уменьшение результирующего вращающего момента при неизменном моменте нагрузки приводит к снижению угловой скорости ротора. Появление обратного поля обусловливает увеличение потерь, уменьшение механической мощности и к.п.д. двигателя.
Следует отметить, что увеличение м.д.с. одной из обмоток статора по сравнению со значением, соответствующим круговому полю, приводит к появлению эллиптического поля, амплитуда которого больше, чем кругового. При этом возрастают обе составляющие поля и в некотором диапазоне возможно увеличение результирующего вращающего момента по отношению к исходному круговому полю. Однако такое форсирование м.д.с. статора связано с превышением напряжением и током своих номинальных значений, соответствующих круговому полю. Это не всегда допустимо, так как вызывает увеличение потерь и дополнительный нагрев двигателя, может привести к насыщению магнитопровода и пробою изоляции.
Когда полностью не выполняется хотя бы одно из условий кругового поля (β =0, γ =0, Iв=0 или Iу=0), поле статора становится пульсирующим и двигатель не развивает вращающего момента при неподвижном роторе. Для объяснения этого явления заменим пульсирующее магнитное поле Φ (рис. 2.6, б) двумя полями Φ 1 и Ф2, вращающимися в противоположные стороны с синхронной угловой скоростью ω 1 и имеющими амплитуды, равные половине амплитуды пульсирующего поля.
При неподвижном роторе оба поля вращаются относительно ротора с синхронной угловой скоростью. Каждое из них наводит в обмотке ротора токи, равные вследствие равенства полей и скольжений. Возникают равные по значению вращающие моменты, направление которых противоположно, как и направление полей. Результирующий момент равен нулю, и ротор во вращение прийти не может.
Картина несколько меняется, если поле статора становится пульсирующим при вращении ротора в какую-либо сторону. В этом случае при определенных условиях двигатель может продолжать развивать вращающий момент, так как скольжение его ротора относительно прямого и обратного полей будет уже неодинаковым. Поле статора в исполнительном асинхронном микродвигателе становится пульсирующим при снятии сигнала управления. Следовательно, ротор двигателя может продолжать вращаться при снятом сигнале управления, что недопустимо для исполнительных двигателей. Это явление, называемое параметрическим самоходом.
Физическое объяснение возникновения электромагнитного момента при пульсирующем поле статора и скольжении s ≠ l заключается в следующем. Пульсирующее поле статора наводит во вращающемся роторе кроме трансформаторной еще и э.д.с. вращения, сдвинутую по фазе относительно трансформаторной. Токи, вызванные в роторе э.д.с. вращения, создают магнитный поток ротора, сдвинутый в пространстве и во времени относительно потока статора. Результирующее магнитное поле двигателя, образующееся при взаимодействии этих двух потоков, получается вращающимся эллиптическим. Направление вращения этого поля зависит от параметров двигателя.
Следует отметить, что в двухфазном двигателе круговое поле может быть получено и при γ ≠ 90о, если γ + β = 180° и амплитуды м.д.с. равны. Однако в исполнительных двигателях такой способ широкого распространения не получил.
ЛЕКЦИЯ №6
|
|