Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Анализ динамических характеристик электроподвижного состава при движении по рельсовому пути
|
|
При разработке подвижного состава большое внимание уделяется снижению воздействия экипажной части на железнодорожный путь. Вертикальные динамические силы в рессорном подвешивании, вызванные колебаниями надрессорного строения экипажа, должны быть не больше 40 % от статической нагрузки [4-6]. Превышение этого уровня динамических сил может значительно снизить вертикальную нагрузку на тяговые оси и привести к ухудшению тяговых качеств ЭПС, его сцепных свойств, возникновению боксования движущих колесных пар, а иногда и к сходу поезда, вызванному нарушением условия устойчивости обезгруженного колеса относительно схода с рельсов, например, при движении ЭПС в кривых участках пути.
Наибольшее воздействие экипажа на путь обычно возникает при ударном взаимодействии колеса с рельсом. Такое взаимодействие происходит в результате появления дополнительных сил инерции необрессоренных масс экипажа при наличии изолированных коротких неровностей, имеющихся как на поверхности рельсов, так и на поверхностях колес. Под действием коротких неровностей мгновенный центр вращения колеса практически мгновенно (за доли секунды) переходит из одного положения в другое, что приводит к удару колеса по рельсу. Примерами коротких неровностей на колесах является ползун, а в железнодорожном пути - неровности в рельсовых стыках. Немаловажную роль в увеличении воздействия экипажа на путь при повышении скоростей движения оказывают и непрерывные неровности колес и рельсов.
Рассмотрим двух массовую модель рельсового экипажа с двухступенчатым рессорным подвешиванием, в каждой из ступеней которого установлены гидродемпферы с линейной зависимостью сипы вязкого трения в гасителе от скорости движения поршня. Тогда согласно параметрам расчетной схемы, показанной на рисунке 3, дифференциальные уравнения движения экипажа по вертикальным неровностям рельсового пути имеют следующий вид [4, 5]
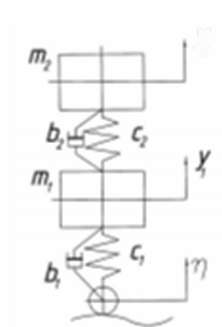
Рисунок 3. Расчетная схема экипажа.
 (23)
(23)
где  обрессоренная масса тележки и масса кузова;
обрессоренная масса тележки и масса кузова;  - коэффициенты жесткости буксовой и центральной ступеней рессорного подвешивания;
- коэффициенты жесткости буксовой и центральной ступеней рессорного подвешивания;  - коэффициенты демпфирования буксовой и центральной ступеней рессорного подвешивания; ƞ, ἡ - кинематическое возмущение со стороны рельсового пути и производная от этого возмущения по времени t (скорость перемещений).
- коэффициенты демпфирования буксовой и центральной ступеней рессорного подвешивания; ƞ, ἡ - кинематическое возмущение со стороны рельсового пути и производная от этого возмущения по времени t (скорость перемещений).
Параметры ,  , берутся из задания на курсовую работу.
, берутся из задания на курсовую работу.
Выбор кинематической формы возмущающей функции от вертикальных неровностей рельсового пути предполагает движение экипажа по абсолютно жесткому пути. В этом случае считают, что ось колесной пары перемещается вдоль вертикальной оси по известной траектории ƞ (t). Поэтому в уравнениях динамики рельсового экипажа не учитывается дифференциальное уравнение, описывающее вертикальные колебания необрессоренной массы тележки с учетом упруго-диссипативных свойств рельсового пути, что и отражает система из двух обыкновенных дифференциальных уравнений второго порядка (23) с постоянными коэффициентами.
Рассмотрим сначала свободные колебания динамической модели (23). В этом случае отсутствуют возмущающее воздействие (то есть  ) и диссипативные силы в подвешивании (то есть
) и диссипативные силы в подвешивании (то есть  ). Сделав подстановку
). Сделав подстановку
y1=A1sin(ɷ t+φ) y2=A2sin(ɷ t+φ) (24)
преобразуем систему уравнений (23) к виду

Рассматриваемая система уравнений содержит три неизвестные величины: амплитуды  и циклическую частоту
и циклическую частоту  . Разделим оба уравнения на
. Разделим оба уравнения на  и выразим полученное отношение амплитуд через параметры системы
и выразим полученное отношение амплитуд через параметры системы
 (25)
(25)
 (26)
(26)
Приравняв правые части выражений (25) и (26), получим частотное уравнение (то есть уравнение относительно неизвестной частоты ɷ)

которое приводится к биквадратному уравнению
 (27)
(27)
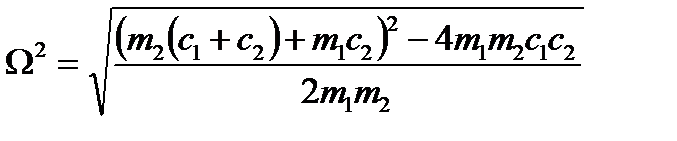
Его решение с учетом положительности значений циклических частот может быть представлено в форме:
 (28)
(28)
Анализ решения (28) частотного уравнения (27) позволяет сделать вывод, что колебательный процесс в рассматриваемой двухмассовой системе будет двухчастотным. При этом нижнее значение частоты будет примерно соответствовать собственной частоте вертикальных колебаний кузова, а верхнее - собственной частоте колебаний обрессоренной массы тележки.
Вычислим собственные частоты вертикальных колебаний экипажа. Для этого введем в рассмотрение вспомогательную величину
Принимая во внимание, что циклическая частота со связана с частотой колебаний  в Гц формулой
в Гц формулой  определим сначала собственную частоту вертикальных колебаний кузова
определим сначала собственную частоту вертикальных колебаний кузова
 ;
;

а затем и собственную частоту вертикальных колебаний обрессоренных масс тележки
 ;
;

Следует отметить, что колебания ЭПС при его движении по рельсовому пути значительную часть времени происходят с собственными частотами колебаний элементов экипажной части. Поэтому при разработке механической части ЭПС конструкторы стремятся обеспечить частоту собственных вертикальных колебаний кузова примерно на уровне 1, 0 Гц, что соответствует собственной частоте колебаний тела человека при его комфортном движении прогулочным шагом. Чем выше конструкционная скорость ЭПС, тем жестче это требование к собственной частоте колебаний кузова. Собственная частота вертикальных колебаний обрессоренной массы тележки ЭПС зависит не только от жесткости рессорного подвешивания, но йот схемы подвешивания тяговых электродвигателей (ТЭД). В среднем, эта частота обычно находится в диапазоне от 3 до 6 Гц. На пассажирском, скоростном и высокоскоростном ЭПС, в отличие от грузовых электровозов, используют опорно-рамное подвешивание ТЭД, что существенно уменьшает необрессоренную массу тележки и сдвигает собственную частоту колебаний обрессоренной массы к нижней границе указанного выше частотного диапазона. Полученные значения собственных частот отвечают указанным требованиям.
Оценим амплитудно-частотные характеристики рассматриваемого экипажа [4, 5]. Для этого сначала вычислим следующие вспомогательные параметры экипажа:
 ;
;  ;
;
 ;
;  ;
;
 ;
;  ;
;
 ;
;  ;
;
 .
.
При расчетах используются громоздкие формулы, которые разобьем на следующие составляющие:
 (29)
(29)
 (30)
(30)
 (31)
(31)
 (32)
(32)
 (33)
(33)
 (34)
(34)
 (35)
(35)
Расчеты будем проводить в табличной форме. Сначала, задавшись значением частоты  , вычисляем циклическую частоту
, вычисляем циклическую частоту  , а затем, используя зависимости (29)-(35), определяем при
, а затем, используя зависимости (29)-(35), определяем при  соответствующие заданной частоте
соответствующие заданной частоте  значения амплитуд установившихся (гармонических) колебаний обрессоренной массы тележки
значения амплитуд установившихся (гармонических) колебаний обрессоренной массы тележки  и кузова
и кузова  согласно формулам
согласно формулам
 (36)
(36)
 (37)
(37)
Кроме того, в рамках данных расчетов вычислил значения коэффициентов вертикальной динамики для 1-ой и 2-ой ступеней подвешивания
 (38)
(38)
 (40)
(40)
Коэффициент вертикальной динамики представляет собой отношение динамической силы в ступени подвешивания к статической сипе. Согласно нормам для грузовых электровозов  < 0, 4 и
< 0, 4 и  < 0, 25 [6]. Анализируя значения коэффициентов динамики, можно оценить воздействие экипажа на путь и эффективность работы системы рессорного подвешивания.
< 0, 25 [6]. Анализируя значения коэффициентов динамики, можно оценить воздействие экипажа на путь и эффективность работы системы рессорного подвешивания.
Расчеты амплитуд перемещений при установившихся колебаниях экипажа и коэффициентов вертикальной динамики представлены в таблице 1.
На рисунке 4 показаны перемещения кузова при его установившихся гармонических колебаниях на фиксированной частоте 1 Гц. Амплитуда перемещений определена по строке 4 таблицы 1 ( = 0, 018 м). Для построения графика использована зависимость

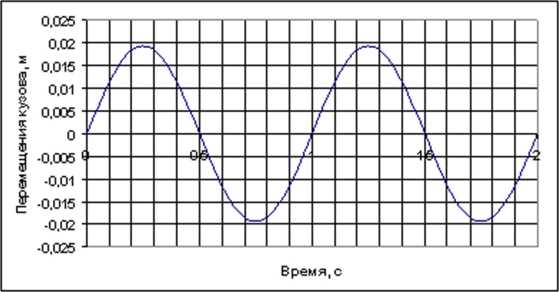
Рисунок 4 - Перемещения кузова при его установившихся колебаниях на частоте 1 Гц
На рисунках 5 и 6 показаны графические зависимости, отражающие изменение амплитуд перемещений и коэффициентов вертикальной динамики экипажа при его установившихся колебаниях.
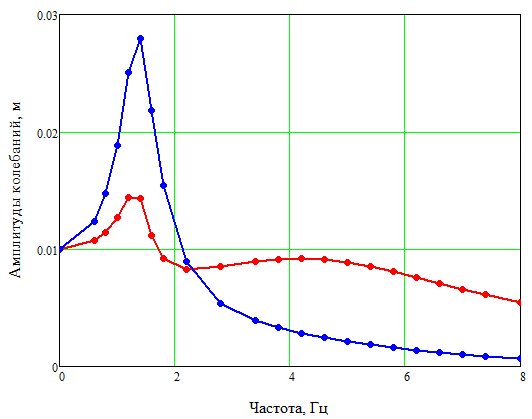
Рисунок 5 - Графические зависимости амплитуд перемещений при установившихся колебаниях экипажной части ЭПС: 1 - обрессоренная масса тележки; 2 – кузов
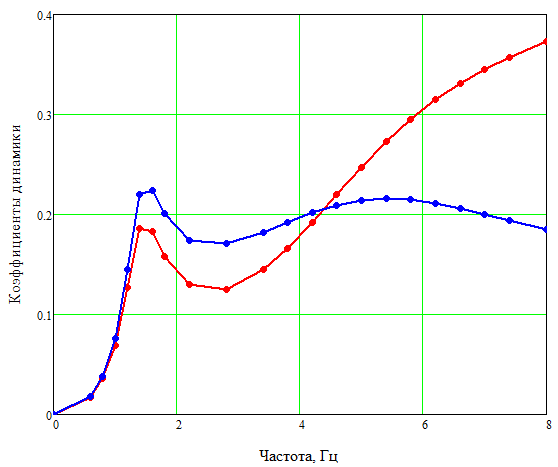
Рисунок 6 - Графические зависимости коэффициентов вертикальной динамики от частоты кинематического возмущения со стороны рельсового пути: 1 - 1-я ступень подвешивания, 2 - 2-я ступень подвешивания
Анализ графиков рисунка 5 показывает, что максимум амплитуд перемещений кузова приходится на его рассчитанную ранее собственную частоту вертикальных колебаний (в железнодорожной терминологии - «колебаний подпрыгивания» кузова) 1, 417 Гц. При повышении частот возмущающего воздействия кривая перемещений подпрыгивания кузова носит убывающий характер. Кривая амплитуд установившихся колебаний подпрыгивания обрессоренной массы тележки имеет абсолютный максимум примерно на резонансной частоте колебаний кузова и локальный максимум примерно в области собственной частоты 5, 56 Гц. Амплитудный максимум этой кривой обусловлен вовлечением тележки в колебательный процесс кузова за счет значительной его массы и возникающих сип инерции. «Сглаженность» локального максимума и некоторая «сдвижка» его вдоль оси частот обусловлены влиянием демпфирования в системе рессорного подвешивания, поскольку, в целях упрощения, при расчете собственных частот колебаний подпрыгивания кузова и тележки демпфирование не учитывалось.
Анализ графиков рисунка 6 показывает, что обе зависимости коэффициентов вертикальной динамики имеют по два максимума, соответствующие областям собственных частот колебаний. Это связано с тем, что динамические составляющие в ступенях рессорного подвешивания непосредственно связаны с относительными скоростями и перемещениями кузова и тележек. При этом динамическая составляющая в 1-ой ступени подвешивания существенно возрастает с увеличением частоты возмущения, что отражает повышение воздействия экипажа на путь при росте скорости его движения.
Следует отметить, что рассмотренный в данном раздела расчет носит озна-комительный характер, поскольку во всем исследуемом частотном диапазоне задавалась неизменная амплитуда кинематического возмущения. В более сложных расчетах, отражающих динамическое взаимодействие экипажа с подсистемой инфраструктуры железнодорожного транспорта «рельсовый путь:», обычно учитывают реальную картину распределения энергии случайных составляющих возмущения по частотам при помощи функций спектральной плотности [4, 5]. Особенности таких расчетов изучаются, например, в курсе «Динамика подвижного состава».
|
|