Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Функции подсистемы прерываний и их реализация
|
|
1) обнаружение изменения состояния внешней среды (запрос на прерывание);
2) идентификация источника прерывания;
3) разрешение конфликтной ситуации в случае одновременного возникновения нескольких запросов (приоритет запросов);
4) определение возможности прерывания текущей программы (приоритет программ);
5) фиксация состояния прерываемой (текущей) программы;
6) переход к программе, соответствующей обслуживаемому прерыванию;
7) возврат к прерванной программе после окончания работы прерывающей программы.
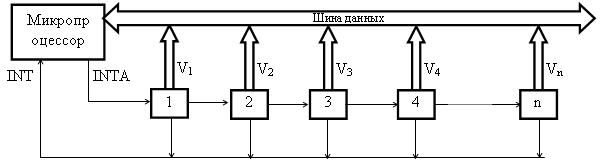
Различают два типа входов запросов на прерывания - радиальные и векторные. Процессор анализирует состояние входов запросов в конце каждого машинного цикла. Получив запрос на прерывание, процессор должен идентифицировать его источник, т.е. в конечном счете, определить начальный адрес обслуживающей это прерывание программы. Способ идентификации зависит от типа входа, на который поступил запрос. Каждый радиальный вход связан с определенным адресом памяти, по которому размещается указатель на обслуживающую программу или сама программа. Если на радиальный вход поступает несколько запросов, то необходимо осуществить программную идентификацию источника путем последовательного (в порядке убывания приоритетов) опроса всех возможных источников прерывания. Этот способ не требует дополнительных аппаратных затрат и одновременно решает проблему приоритета запросов, однако время реакции системы на запрос может оказаться недопустимо велико, особенно при большом числе источников прерываний. Гораздо чаще в современных МПС используется т.н. " векторная" подсистема прерываний. В такой системе микропроцессор, получив запрос на векторном входе INT, выдает на свою выходную линию сигнал подтверждения прерывания INTA, поступающий на все возможные источники прерывания. Источник, не выставивший запроса, никак не реагирует на сигнал INTA. Источник, выставивший запрос, получая сигнал INTA, выдает на системную шину данных " вектор прерывания" – свой номер или адрес обслуживающей программы или, чаще, адрес памяти, по которому расположен указатель на обслуживающую программу. Время реакции МПС на запрос векторного прерывания минимально (1..3 машинных цикла) и не зависит от числа источников. Для исключения конфликтов при одновременном возникновении нескольких запросов на векторном входе ответный сигнал INTA подается на источники запросов не параллельно, а последовательно – в порядке убывания приоритетов запросов. Источник, не выставлявший запроса, транслирует сигнал INTA со своего входа на выход, а источник, выставивший запрос, блокирует дальнейшее распространение сигнала INTA. Таким образом, только один источник, выставивший запрос, получит от процессора сигнал INTA и выдаст по нему свой вектор на шину данных. Более гибко решается проблема организации приоритетов запросов при использовании в МПС специальных контроллеров прерываний. Конфликты на радиальном входе исключаются самим порядком программного опроса источников. Прерывание в общем случае может возникать не только при решении " фоновой" задачи, но и в момент работы другой прерывающей программы, причем не всякую прерывающую программу допустимо прерывать любым запросом. В фоновой задаче так же могут встречаться участки, при работе которых прерывания (все или некоторые) недопустимы. В общем случае в каждый момент времени работы процессора должно быть выделено подмножество запросов, которым разрешено прерывать текущую программу. В МПС эта задача решается на нескольких уровнях. В процессоре обычно предусматривается программно-доступный флаг разрешения/запрещения прерывания, значение которого определяет возможность или невозможность всех прерываний. Для создания более гибкой системы приоритетов программ на каждом источнике прерываний может быть предусмотрен специальный программно-доступный триггер разрешения формирования запроса. В таком случае возможно формирование произвольного подмножества разрешенных в данный момент источников прерываний. В МП: машинный такт - машинный цикл - командный цикл. Рассмотрим возможность прерывания программы по окончанию различных процессов. Учитывая, что прерванная программа должна быть запущена по окончании работы прерывающей с того места, где она была прервана, подсистема прерываний МПС должна обеспечить фиксацию полного состояния прерываемой программы на момент прерывания. При прерывании после текущего машинного такта требуется запоминать не только состояние всех регистров процессора (программно-доступных и системных), но и состояние первичного управляющего автомата. Реализация процедуры фиксации состояния и последующего восстановления потребует значительных затрат дополнительного оборудования и/или времени. Значительный объем информации требуется запоминать и при прерывании программы после текущего машинного цикла (выбранный фрагмент или всю команду, выбранные операнды или сформированные адреса). Поэтому в большинстве МП прерывание может осуществляться после выполнения очередной команды.
(59) Подсистема памяти МПС.
|
|