Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Индукционные (не имеющие картушки) магнитные компасы. Принцип действия, особенности устройства. Уравнения, описывающие работу компаса.
|
|
В ИМК в качестве чувствительного элемента используется индукционный датчик, включающий в себя 2-3 феррозонда. Новые ИД построены на кольцевых ферромагнитных элементах, которые имеют одну обмотку возбуждения и 1 или несколько сигнальных обмоток.

Достоинства: 1)С помощью этого датчика можно измерять несколько различных направлений относительно вектора измеряемого поля, что исключено при использовании для стержневых феррозондов. 2) Однородность механических и магнитных параметров сердечника, а также параметров цепи возбуждения обеспечивают низкий уровень шума и высокую стабильность нуля феррозонда. 3) Замкнутость магнитопроводов позволяет создать меньший по размерам датчик. 4) отсутствует необходимость подбора сердечников. Феррозонды питаются синусоидальными или прямоугольными напряжениями. Второе считается более предпочтительнее – получить более устойчивую работу датчика при значительном увеличении коэффициента, что позволяет использовать микромодульные устройства, не требующие значительной настройки. Но в обоих случаях выходные сигналы – это напряжения постоянного тока прямопропорциональны напряженностям измеряемых магнитных полей. 2 способа подвеса индукционного датчика – кардановый и безкардановый.

1. Индукционный датчик, 2.Внутр.кардановое кольцо, 3.наружное кардановое кольцо, 4.Корпус прибора.
Индукционный датчик в 3 устанавливается т.о., чтобы центр масс системы был ниже центра подвеса. В этом случае из-за наличия маятниковости, индукционный датчик располагается в плоскости горизонта и сохраняет своё горизонтальное положение при качке судна. прибор заполняется жидкостью для демпфирования колебаний при внешних возмущающих воздействиях. Наружное кардановое кольцо поворачивается вокруг ОУ, а внутренне – относительно внешнего OZ. Если использовать двухкоординатный датчик, то будут определяться составляющие напряженностей магнитных полей X’ и Y’ которые будет определять: X’=H’*COSKK, Y’= -H’*SINKK, тогда текущее значение курса будет определяться как: КК = - arctg(Y’/X’)- (1)
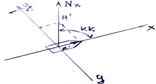
Чтобы исключить в знаменателе значения нуля, измерение производится от 0 до 45 по ф-ле (1), а от 45 до 90 по формуле: KK = - arctg(X’/Y’)

ИД – индукционный датчик, К-коммутатор, АЦП- аналого-цифровой преобразователь, В- вычислитель, УИ- устройство индикации, Г –генератор(питание). Параметры H’ измеряются индукционным датчиком, на выходе которого формируется напряжение, пропорциональноеX’ и Y’. Эти напряжения последовательно подключаются в АЦП через коммутатор. А в АЦП формируются цифровые значения параметров X’ и Y’, которые постоянны в (В), где рассчитываются значения КК с использованием формул: КК = - arctg(Y’/X’) и KK = - arctg(X’/Y’). Там же вычисляется значение H’= √ (X’)^2+(Y’)^2, для определения Δ МК à МК= arctg((X’+Δ X)/(Y’+Δ Y)). При введении значения d получаем ИК.
|
|