Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Развеска оборудования локомотива
|
|
Развеска позволяет определить положение центра тяжести верхнего (надтележечного) строения локомотива и распределение нагрузок по его тележкам и (или) колесным парам.
При выполнении развески проектируемого электровоза можно ограничиться выбором наиболее крупных по весогабаритным характеристикам узлов, составляющих верхнее строение локомотива. К числу таких узлов относятся: трансформатор, блоки силовой электроники, высоковольтная камера, блок тормозного оборудования, кузов с кабинами машиниста, главная рама и вспомогательное оборудование, такое как аккумуляторные батареи, вспомогательные машины.
При определении весогабаритных характеристик основных узлов и оборудования следует ориентироваться на аналогичные параметры электровоза-прототипа.
В таблице 1.1 приведены примерные веса основных узлов и оборудования магистральных электровозов, конкретная серия которого выбирается студентом по номеру варианта.
Для выполнения развески используется схема (эскиз) первоначального расположения узлов и оборудования, т.е. ранее выполненная компоновка (см. рис. 1.1).
Может быть рекомендована следующая последовательность выполнения развески проектируемого электровоза:
- вес каждого i -го узла представляется в виде вектора силы тяжести приложенного в его центре тяжести и обозначается G i (веса тележек в развеске не участвуют);
- ось моментов Z (см. рис. 1.1) совмещается с осью передней автосцепки электровоза; ось X – с головками рельсов колеи;
- на схеме компоновки отмечаются расстояния от векторов сил тяжести узлов Gi до оси моментов Z и обозначаются li; желательно, что бы, например, величине G5 соответствовало расстояние l5 и т.д.;
-составляется весовая ведомость электровоза, которую нужно представить в табличной форме, аналогичной таблице 1.2, с помощью которой определяется вес строения электровоза ∑ Gi и суммарный момент сил тяжести ∑ Мi;

Рис. 1.1. Схема расположения основных узлов на магистральном электровозе
Таблица 1.1
Примерные веса основных узлов и оборудования одной секции серийных электровозов, в кН
| № варианта | Серия электровоза/ Длина секции, м | Трансформатор | Кузовная рама электровоза | Кузов в целом | Кабина машиниста | Мотор- компрессор | Выпрямитель/ВИП | АИН | Генератор управления | Мотор-вентилятор | Высоковольтная камера | Аккум. батарея | Блок управления | Тележка в сборе |
| ЧС-2 18, 9м | -- | 10, 2 | 1, 4 | 0, 6 | -- | -- | 0, 3 | 0, 13 | 1, 5 | -- | ||||
| ЧС-4 20м | 10, 6 | 1, 5 | 0, 6 | 6, 5 | -- | 0, 3 | 0, 14 | 2, 6 | 1, 6 | -- | ||||
| ЧС-7 17м | -- | 11, 5 | 12, 5 | 3, 6 | 0, 6 | -- | -- | 0, 3 | 0, 12 | 1, 7 | 0, 7 | |||
| ЧС-8 17м | 11, 512, 0 | 12, 5 | 3, 6 | 0, 6 | 5, 5 | -- | 0, 3 | 0, 12 | 2, 5 | 1, 7 | 0, 5 | |||
| ВЛ10 16, 2м | -- | 13, 5 | 2, 1 | 0, 7 | -- | -- | 0, 35 | 0, 19 | 6, 7 | 2, 1 | -- | |||
| ЭП2К 21, 7м | -- | 12, 5 | 10, 5 | 3, 4 | 0, 6 | -- | -- | 0, 3 | 0, 12 | 5, 2 | 1, 6 | 26, 5 | ||
| ЭП1М 22, 5м | 13, 5 | 10, 5 | 3, 3 | 0, 6 | -- | 0, 35 | 0, 12 | 2, 7 | 1, 6 | 26, 5 | ||||
| ВЛ80 17м | 3, 6 | 0, 8 | -- | 0, 45 | 0, 19 | 2, 9 | ||||||||
| 2ЭС5к 17, 5м | 12, 5 | 12, 5 | 4, 0 | 0, 8 | 6, 5 | -- | 0, 45 | 0, 18 | 1, 5 | 27, 5 | ||||
| 2ЭС10 17м | 3, 3 | 0, 35 | 2, 0 | 3, 3 | 0, 2 | 0, 1 | -- | 1, 5 | 22, 4 |
Таблица 1.1
Примерные веса основных узлов и оборудования одной секции серийных электровозов, в кН
При составлении табл.1.2 размещать 13-ть вышеуказанных элементов секции электровоза (определение плеча lі) следует исходя из рекомендаций:
| Элемент секции электровоза | Рекомендуемые расстояния расположения центра тяжести элемента от левой автосцепки (рис 1.1) в м |
| Трансформатор (для электровозов переменного тока) | 0, 5 L секции; для 2ЭС10, где 2 трансформатора L1=8м, L2=9.5м |
| Кузовная рама электровоза | 0.97L сек/2 |
| Кузов в целом | 1, 03L сек/2 |
| Кабина машиниста | 1, 1м |
| Мотор-компрессор | 0, 87 L сек |
| ВИП (для элек-ов переменного тока) | 0, 88 L сек |
| АИН (только для 2ЭС10) | 0, 81 L сек |
| Генератор управления | 0, 19 L сек |
| Мотор-вентилятор (2 шт) | 1- 0, 3 L сек 2- 0, 7 L сек |
| Высоковольтная камера | 0, 4 L сек – для электровозов постоянного тока 0, 3 L сек – для электровозов переменного тока |
| Аккумуляторная батарея | 0, 65 L сек |
| Блок управления | О, 6 L сек – для всех, кроме 2ЭС10- 0, 85L сек |
| Тележка в сборе | Первая- L1=1.5+Lбазы/2, м Вторая- L2=Lсек -1, 5-Lбазы/2, м |
Таблица 1.2 Весовая ведомость проектируемого электровоза
| № п/п | Наименование узла или оборудования | Вес Gi, кН | Плечо li, м | Момент Мi, кН∙ м | Примечание |
| Трансформатор | |||||
| Кузовная рама | |||||
| Кузов в целом | |||||
| Кабина машиниста | |||||
| . . | . . Тележка в сборе | ||||
| Итого | ∑ Gi | ∑ Мi |
- определяется координата Xцт центра тяжести верхнего строения электровоза по следующей формуле, м
 (1.1)
(1.1)
где ∑ Мi - суммарный момент сил тяжести узлов и оборудования, входящих в верхнее строение электровоза, кН∙ м
 (1.2)
(1.2)
где  - вес верхнего строения электровоза, кН;
- вес верхнего строения электровоза, кН;
li – плечо приложения силы тяжести i -го узла относительно оси моментов Z;
n – количество узлов и оборудования, составляющих верхнее строение локомотива.
Как отмечалось ранее, основная задача развески электровоза – обеспечить более или менее равномерное распределение нагрузок на колесные пары (и тележки!) локомотива. В практике проектирования электровоза принят допуск на неравномерность распределения нагрузок по колесным парам тележки равный ±3%.
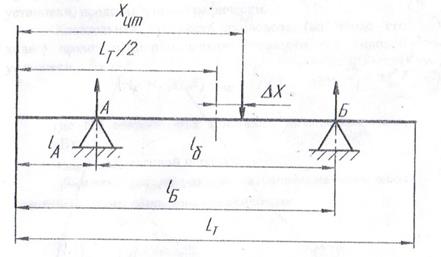
Для определения нагрузок на тележки используют уравнение статики. Раму электровоза представляют в виде балки, расположенной на двух мнимых опорах (центры шкворней). Нагрузки на тележки заменяют реакциями РА и РБ мнимых опор (рис.1.2). На схеме также указываются геометрическая середина электровоза (LТ/2) и координата Хцт центра тяжести ∑ Gi верхнего строения электровоза, а также вектор силы тяжести ∑ Gi. Для нахождения двух неизвестных величин РА и РБ составляют два уравнения статики: уравнение проекций всех сил на вертикаль Z (ось ординат) и уравнение моментов этих сил относительно оси Z.
В соответствии со схемой сил, показанной на рис. 1.2, уравнение проекций всех сил на вертикальную ось ординат Z будет иметь вид
РА + РБ - ∑ Gi = 0 (1, 3)
Уравнение моментов этих сил относительно точки «о» (см. рис. 1.2)
РА ∙ lА + РБ∙ lБ - ∑ Gi ∙ Хцт = 0 (1.4)
где РА и РБ – реакции в мнимых опорах тележек, вызванные действием силы тяжести (веса) ∑ Gi верхнего строения электровоза, кН;
lА, lБ – расстояния от оси моментов Z до мнимых опор А первой (по ходу) и Б второй тележек, м.
Из рис. 1.2 также следует, что
lб = lБ - lА, (1.5)
где lб – база проектируемого электровоза, м.
Совместным решением уравнений (1.3) и (1.4) находятся значения реакций РА и РБ в в мнимых опорах тележек.
 По нормам, применяемых при проектировании электровозов, неравномерность распределения нагрузок
По нормам, применяемых при проектировании электровозов, неравномерность распределения нагрузок  по колесным парам разных тележек не должна превышать величины ±0, 03. При этом принимается, что колесные пары одной тележки имеют одинаковое нагружение.
по колесным парам разных тележек не должна превышать величины ±0, 03. При этом принимается, что колесные пары одной тележки имеют одинаковое нагружение.
РА РБ

Рис. 1.2. Схема для определения неравномерности распределения нагрузок по тележкам локомотива
В этом случае величина может быть определена из следующего выражения, кН
 (1, 5)
(1, 5)
где  - нагрузка от каждой из колесных пар первой (по ходу) тележки, кН
- нагрузка от каждой из колесных пар первой (по ходу) тележки, кН
 (1.6)
(1.6)
где  - вес тележки электровоза, кН;
- вес тележки электровоза, кН;
 - количество осей в тележке, кН;
- количество осей в тележке, кН;
 - нагрузка от каждой из колесных пар второй тележки, кН
- нагрузка от каждой из колесных пар второй тележки, кН
 (1.7)
(1.7)
 – нагрузка от колесной пары на рельсы при равномерном распределении нагрузок по колесным парам электровоза (случай идеальной компоновки, когда Хцт = LТ/2), кН
– нагрузка от колесной пары на рельсы при равномерном распределении нагрузок по колесным парам электровоза (случай идеальной компоновки, когда Хцт = LТ/2), кН
 (1.8)
(1.8)
где  - число сцепных осей локомотива.
- число сцепных осей локомотива.
Несовпадение центра тяжести Хцт и геометрического центра тяжести верхнего строения электровоза  можно определить из выражения, мм
можно определить из выражения, мм
 (1.9)
(1.9)
Если неравномерность распределения нагрузок , определенная по формуле (1.7), превышает нормативную величину ±0, 03 (3%), компоновку проектируемого электровоза надо изменить. В этом случае целесообразно передвинуть наиболее тяжелые узлы, в сторону геометрического центра верхнего строения электровоза и тем самым уменьшить величину . Вновь составляется весовая ведомость и определяется координата  центра тяжести проектируемого электровоза.
центра тяжести проектируемого электровоза.
Задание:
Произвести развеску оборудования проектируемого электровоза. Наименование оборудования, его вес в соответствии с вариантом задания, представлены в таблице 1.1.
2. Определение тяговой характеристики электровоза
Тяговая характеристика электровоза – это графическая зависимость касательной силы тяги локомотива от скорости движения Fк=f(v) и режимов работы его энергетической (силовой) установки:
- для электровозов, оборудованных коллекторными тяговыми двигателями – это сумма мощностей тяговых двигателей, установленных на электровозе
- для оборудованных асинхронными – это сумма мощностей транзисторных статических преобразователей (СПЧ), питающих асинхронные тяговые двигатели (АТД).
Касательная мощность электровоза (на ободе его колеса) прямо пропорциональна мощности его силовой установки, кВт:
 (2.1)
(2.1)
где n – число тяговых двигателей (ТЭД) или СПЧ на электровозе;
 - мощность на выходе одного ТЭД (СПЧ), кВт;
- мощность на выходе одного ТЭД (СПЧ), кВт;
 – к.п.д. тяговой передачи
– к.п.д. тяговой передачи  0, 97 для всех типов ТЭД (СПЧ).
0, 97 для всех типов ТЭД (СПЧ).
Для электровоза при выборе формы тяговой характеристики Fк=f(v) следует исходить из условия постоянства касательной мощности в рабочем диапазоне скоростей движения,  .
.
Как известно, величину касательной мощности электровоза можно определить из следующего выражения:
 (2.2)
(2.2)
откуда
 (2.3)
(2.3)
Величина касательной мощности для коллекторных ТЭД делится на длительную (непрерывная работа до 6 часов), часовую (номинальную) и максимальную (непрерывная работа 5-15 минут). Все типы мощностей определяются (ограничиваются) нагреванием ТЭД.
Для АТД мощность, как правило, делится на номинальную (часовую) и максимальную (бустерную), по условиям работы СПЧ (ограничение по нагреванию транзисторов из-за их коммутации). Как правило, разработчики силовых транзисторов указывают соотношение мощностей max/nom=1.05  1.1, но на практике из-за резкого увеличения стоимости СПЧ рекомендуют max=nom. Однако, в связисо стремительными изменениями в технологиях производства силовых транзисторов (типа JGBT), что резко из года в год уменьшают стоимость производства и эксплуатации СПЧ, для электровозов, оборудованных АТД, в последние два-три года также появились понятия максимальной, номинальной и длительной мощности электровоза. В курсовой работе пока используйте только понятие номинальной (часовой) мощности при построении тяговой характеристики для электровозов с АТД.
1.1, но на практике из-за резкого увеличения стоимости СПЧ рекомендуют max=nom. Однако, в связисо стремительными изменениями в технологиях производства силовых транзисторов (типа JGBT), что резко из года в год уменьшают стоимость производства и эксплуатации СПЧ, для электровозов, оборудованных АТД, в последние два-три года также появились понятия максимальной, номинальной и длительной мощности электровоза. В курсовой работе пока используйте только понятие номинальной (часовой) мощности при построении тяговой характеристики для электровозов с АТД.
Условие  , представляет собой уравнение гиперболы в координатах
, представляет собой уравнение гиперболы в координатах  и V.
и V.
Таким образом, если касательная сила тяги изменяется обратно пропорционально скорости V, то касательная мощность  в этом случае будет постоянной.
в этом случае будет постоянной.
График гиперболы характерен тем, что кривая ветвями (по осям координат) уходит в бесконечность, асимптотически приближаясь к осям координат ( и V), но бесконечных значений физических величин ( и V) в технике, быть не может. По этому максимальные значения касательной силы и V и, соответственно, тяговые возможности электровоза ограничены.
Первое ограничение – касательной силы тяги электровоза – по условиям сцепления колес электровоза с рельсом (или просто – по «сцеплению»). Максимально возможная реализация в эксплуатации величины касательной силы тяги  не может превосходить силу сцепления колес электровоза с рельсами, Н
не может превосходить силу сцепления колес электровоза с рельсами, Н
 (2.4)
(2.4)
где  - сцепной вес локомотива с учетом числа секций, кН;
- сцепной вес локомотива с учетом числа секций, кН;
 - расчетный коэффициент сцепления;
- расчетный коэффициент сцепления;
1000 – коэффициент перевода «кН» в «Н».
Неравенство (2.4) является конкретным выражением основного закона локомотивной тяги.
Значения расчетного коэффициента сцепления определяют опытным путем с помощью опытных поездок электровозов с поездами различного веса и они должны соответствовать наиболее распространенным условиям эксплуатации и определенному техническому состоянию локомотивов. В «Правилах тяговых расчетов для поездной работы»  приводятся эмпирические формулы для определения значений расчетного коэффициента сцепления для электровозов различных серий.
приводятся эмпирические формулы для определения значений расчетного коэффициента сцепления для электровозов различных серий.
Так для электровозов постоянного тока:
 (2.5)
(2.5)
где V – скорость движения, км/ч.
Для электровозов переменного тока:
 (2.6)
(2.6)
Для электровозов с АТД,  больше чем для электровозов с коллекторным двигателем и определяется согласно рекомендациям ВНИИЖГа:
больше чем для электровозов с коллекторным двигателем и определяется согласно рекомендациям ВНИИЖГа:
 (2.6)
(2.6)
Второе ограничение – касательной силы тяги – по мощности силовой установки – для ЭПС силовой установкой является либо сумма мощностей ТЭД ил сумма СПЧ для электровозов с АТД. Сами мощности делятся на три вида (см. комментарии к формулам 2.2 и 2.3)
С учетом принятых при проведении тяговых расчетов единиц измерения основных параметров двигателя ( и V) уравнения (2.2) примет вид, кВт
 (2.7)
(2.7)
где - касательная сила тяги, Н
V – скорость движения, км, ч
Если брать единицы измерения в кГс, то формула (2.7) будет иметь вид:

Подставив уравнение (2.7) в (2.3) получим равенство для определения второго ограничения касательной силы тяги, Н
 (2.8)
(2.8)
где  =const – суммарная мощность ТЭД (СПЧ) электровоза;
=const – суммарная мощность ТЭД (СПЧ) электровоза;
n – число ТЭД (СПЧ)
Третьим ограничением касательной силы тяги является ограничение по конструкционной (максимальной) скорости.
При выполнении курсовой работы необходимо рассчитать параметры и построить тяговую характеристику электровоза с использованием упрощенной методики. При этом рекомендуется руководствоваться следующим:
1. Воспользовавшись выражениями (2.4 и 2.6) необходимо рассчитать ограничение тяговой характеристики Fк=f(v) электровоза, по сцеплению. Сцепной вес локомотива, номинальную мощность, суммы всех его мощностей и тип локомотива указаны по вариантам в таблице 2.1.
Таблица 2.1
| Мощность электровоза (номинальная, на валу ТЭД) (Ne∙ n) | ||||||||||
| Сцепной вес электровоза, т | ||||||||||
| Тип локомотива | с АТД | Пост. тока | Пер. тока | с АТД | Пост. тока | Пер. тока | Пост. тока | с АТД | Пер. тока | с АТД |
| № варианта |
Электровозы постоянного и переменного тока имеют коллекторные ТЭД. Результаты расчетов ограничения Fк=f(v) по сцеплению целесообразно представить в табличной форме, аналогичной таблице 2.2.
Рекомендуется принять диапазон изменения скорости движения электровоза 0 – 55 км/ч с шагом  = 5 км/ч.
= 5 км/ч.
Таблица 2.2
Результаты расчетов ограничения кривой Fк=f(v) по сцеплению.
| V. км/ч | 5 | 10 | ……. | 55 | ||

| ||||||
| Fк.H |
2. По формуле (2.8) необходимо рассчитать ограничения тяговых характеристик Fк=f(v) проектируемого электровоза по трем типам мощностей электровозов с коллекторными ТЭД и по номинальной (часовой) мощности электровоза с АТД, Результаты расчетов ограничения кривой Fк=f(v) по мощности электровоза целесообразно представить в табличной форме, аналогичной таблице 2.3. Рекомендуется применить диапозон изменения скорости движения электровоза от 40 км/ч до V конструкционной = 120 км/ч (для всех типов электровозов) с шагом  .
.
Соотношение мощностей следует принять следующее:
Рчас/Рдлительная = 1, 1;
Рmax/ Рчас = 1, 8.
Таблица 2.3
Результаты расчетов ограничения кривой Fк=f(v) по мощности электровоза
| V. км/ч | Vконстр=120 | ||||
| Fк.H |
Для электровозов с коллекторными ТЭД таких таблиц будет три – по каждому типу мощности.
3. На миллиметровой бумаге по данным таблиц 2.2 и 2.3 необходимо построить в масштабе расчетную тяговую характеристику проектируемого электровоза. В вариантах даны электровозы постоянного и переменного тока, из-за трех типов мощностей таких характеристик будет три.
Одним из важнейших показателей тяговой характеристики локомотива является расчетная скорость движения Vрасч., Vрасч. – минимально допустимая по условиям обеспечения заданной надежности работы силового оборудования электровоза равномерная скорость движения, которая достигается при ведении поезда расчетного (критического) веса по наиболее трудному (самому длинному подъему) элементу профиля железнодорожного участка.
Также элементы профиля для конкретных участков обращения локомотивов называют расчетными или руководящими подъемами.
Величины Fк и Vрасч. для конкретной серии электровозов устанавливают опытным путем по результатам эксплуатационных испытаний. Для отечественных грузовых электровозов Vр 1, 04 Vном, для пассажирских – приблизительно 100 км/ч, а для скоростных поездов – еще больше. Для грузовых электровозов величина Vном , как правило, определяется точкой пересечения кривых Fксцеп = f(V) (ограничение по сцеплению) и Fк = f(V) (ограничение по номинальной (часовой) мощности.
4. На построенной тяговой характеристике необходимо отметить ее ограничения: по сцеплению, по мощности (для коллекторных ТЭД – три вида) и по конструкционной скорости (максимальное разрешение конструкции).
 В предварительных расчетах Vконстр. определяют как Vконстр. 2 Vрасч., но для эксплуатации рекомендуют для всех типов грузовых электровозов, как уже было сказано выше, Vконстр. = 120 км/ч.
В предварительных расчетах Vконстр. определяют как Vконстр. 2 Vрасч., но для эксплуатации рекомендуют для всех типов грузовых электровозов, как уже было сказано выше, Vконстр. = 120 км/ч.
Тяговая характеристика приблизительно принимает следующий вид:
-максимальной
- номинальной
- длительной
|
|