Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Приемник GPS
|
|
Основная функция системы – определение трехмерных координат пользователя, вектора скорости и времени. Кроме того, она может использоваться для навигации на всех этапах полета.
Приемник GPS/»ГЛОНАСС»
Надо отметить, что приемники GPS и «ГЛОНАСС» существенно различаются по технической реализации. Первые используют более широкую полосу частот, чем GPS-устройства. В системе GPS применяется кодовое разделение каналов, благодаря чему все спутники излучают С/А-коды на общей несущей частоте 1575, 42 МГц (L1). Частотное разделение каналов в «ГЛОНАСС» обуславливает излучение сигналов на разных несущих в диапазоне 1598, 0625 – 1615, 5 МГц (L1). Отсюда – в этих системах задействуются разные аппаратура формирования и алгоритмы обработки фазовых измерений.
Принцип действия комбинированного GPS/»ГЛОНАСС» - приемника поясним на примере АСН – 22. Он состоит из антенны с малошумящим усилителем (МШУ), ВЧ-блока, устройства обработки сигналов и общего навигационного процессора (рис. 3). Приемник может работать в трех режимах, выбираемых по внешней команде: только GPS, только «ГЛОНАСС» и /»ГЛОНАСС».
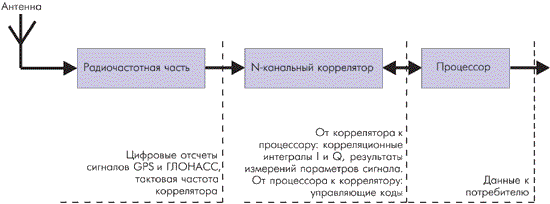
Рис.7. Структурная схема GPS/»ГЛОНАСС»-приемника
На входе устройства установлен фильтр зеркального канала, который распределяет сигнал по двум каналам для отдельных ВЧ-приемников GPS и «ГЛОНАСС». С выхода АЦП навигационные сигналы поступают на два коррелятора, 12-канальный GPS(напрямую) и 6-канальный «ГЛОНАСС» (через блок переключения каналов), которые работают с общей синхронизацией. Многоканальный приемник АСН-22 позволяет отслеживать С/А-код и фазу несущей L1 по всем каналам GPS и «ГЛОНАСС».
На основании измерений и принятых сообщений навигационный процессор вычисляет координаты, вектор скорости и точное время, обеспечивающее «привязку» шкалы времени потребителя к шкале ГОСЭТАЛОНА координированного всемирного времени UTC (SU). Время первоначального определения зависит от числа каналов приемника и производительности навигационного процессора. Для АСН-22 оно составляет менее 90 с (при достоверных начальных данных). Последующие координатно-временные определения выполняются с заданной периодичностью – обычно через 1 с и более. Восстановление слежения осуществляется за 3-5 с.
Результаты вычислений могут выводиться вместе с электронной картой на встроенный дисплей, на экран портативного ПК или передаваться в диспетчерский пункт по радиоканалам спутниковых и наземных систем связи для отслеживания местонахождения подвижного объекта.
Основные принципы функционирования спутниковых навигационных систем ГЛОНАСС и GPS.
В основе СНС заложен принцип измерения расстояний до спутников. Это значит, что для определения местоположения ВС на земной поверхности нужно измерить расстояние до каждого из группы спутников. Таким образом, спутники являются для нас точно известными опорными точками в пространстве. Это достигнуто тем, что орбиты спутников ГЛОНАСС и GPS рассчитаны с очень высокой степенью точности и поэтому в любой момент времени известны координаты каждого спутника. Измерение дальности до спутников происходит по аналогии с маяками для моряков, дальномерами ДМЕ – для летчиков, триангуляционными пунктами – для геодезистов. Если мы имеем точно известные координаты наземных радиодальномеров А и В, то отложив на карте две дальности Д1 и Д2 от этих известных точек, можно достаточно точно запеленговать место воздушного судна.
|
|