Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Простір і час у фізиці. Початкові моделі матеріальних об'єктів
|
|
Геометрична модель простору і часу. Простір і час є початковими поняттями. Фізичний простір моделюється геометричною безліччю точок.
Для того, щоб розрізнити точки в просторі, застосовується система відліку. До системи відліку відноситься і деяка система координат, пов'язана з тілом відліку.
Аналогічно простору моделюється і час. Приймається, що воно безперервне, однорідно, одновимірно, однонапрямлено, тобто змінюється в одному напрямі.
Відносний характер результатів вимірів і їх вплив на об'єкт вимірів відбиваються в найважливіших законах фізики; цей вплив неусувний, і з ним слід вважатися, щоб отримати об'єктивну інформацію про матеріальний світ. Прийнята модель безперервного простору і безперервного часу є узагальненням досвіду, тобто вона відповідає властивостям реального фізичного простору. Обговоримо однорідність і ізотропну простору і однорідність часу. Однорідність - це рівноправ'я усіх точок, а ізотропна - рівноправ'я усіх напрямів в просторі. Ці властивості називають також симетріями простору.
Однорідність часу призводить до закону збереження енергії, однорідність простору - до збереження імпульсу, а ізотропна - до збереження моменту імпульсу.
Отже, розглянута модель простору і часу відповідає властивостям фізичного простору в області, згори обмеженій великими відстанями (порядку розмірів Сонячної системи), а знизу - найменшими відстанями, досягнутими зараз між елементарними частками близько  ..
..  см. Відповідна нижня межа часових проміжків має порядок
см. Відповідна нижня межа часових проміжків має порядок  ..
..  с. Може виявитися, що в невивчених малих областях, при відстанях, менших см, властивості простору виявляться іншими.
с. Може виявитися, що в невивчених малих областях, при відстанях, менших см, властивості простору виявляться іншими.
Класична, польова і квантово-релятивістська моделі матеріальних об'єктів.
Нині матерія в макросвіті відома в двох видах: у вигляді речовини, з якої складаються усі тіла, і у вигляді електромагнітного і гравітаційного полів, що заповнюють простір і передавальних дію тіл один на одного. Розрізняються наступні основні моделі матеріальних об'єктів.
Класична, або механічна, модель. Застосовується для вивчення матерії в макросвіті у вигляді речовини, тобто тіл. Класичною моделлю служить матеріальна точка. Це точка, якій замінюють кінцеве тіло для вивчення, якщо розмірами його можна нехтувати в порівнянні з відстанню між тілами. Система матеріальних точок моделює систему тіл, протяжне тіло.
Польова модель. Вона застосовується для вивчення матерії у вигляді макроскопічного фізичного поля. Існує всього два різні макроскопічні поля - гравітаційне і електромагнітне. Вони властивості непроникності не мають, тобто можуть одночасно знаходитися в одному і тому ж місці простору.
Квантово-релятивістська модель застосовується для вивчення матерії в мікросвіті. Усі макроскопічні тіла складаються з елементарних часток протонів, нейтронів, електронів, що мають масу. Елементарні частки моделюються точками, Енергією, що володіють, і масою. Ці точки називаються мікрочастками Між матеріальною точкою (моделлю тіла) і мікрочасткою (моделлю елементарної частки) є істотна різниця, пов'язана з практичним визначенням їх положення в просторі.
2.Закони збереження. Система тіл, полів, мікрочасток називається ізольованою, якщо не випробовує взаємодії зі своїм оточенням: в неї не поступають і з неї не йдуть які -небудь мікрочастки. У ізольованій системі мають місце найважливіші для усієї фізики закони збереження ряду фізичних величин. Це передусім закони збереження енергії, імпульсу, моменту імпульсу. Сморід являється універсальними для усіх взаємодій і усіх фізичних явищ, тому що обумовлені властивостями простору і годині. Розглянемо закони збереження з якісного боку, використовуя моделі взаємодії.
Почнемо з квантово- релятивістської системи. До взаємодії мікрочастки вільні і кожна має енергію, імпульс, момент. Відповідні величини для усієї системи визначаються формулами
Е =  (4.B)
(4.B)
В результаті взаємодії енергія, імпульси, моменти окремих часток змінилися, і після взаємодії ці параметри системи набули значень:
 =
= 
Відповісти на питання, чи змінюються енергія, імпульс, момент системи в результаті взаємодії або залишаються незмінними, можна на підставі досвіду. Нині уся величезна сово-купность експериментальних і спостережливих даних говорить про їх строге збереження для ізольованої системи елементарних часток.
Закони збереження виражаються формулами
 (5/8)
(5/8)
Дуже істотно, що при взаємодії частки, як такі, не обов'язково зберігаються: можуть зникати одні і виникати інші, але без порушення рівності (5.8).
Для механічної і польової моделей, тобто для тіл і безперервного поля, збереження енергії, імпульсу, моменту імпульсу виявляється наслідком збереження їх в квантово-релятивістській системі. Насправді, будь-яка система матеріальних об'єктів кінець кінцем складається з елементарних часток, а її енергія, імпульс, момент імпульсу визначаються формулами (4.В). Якщо система ізольована, то названі величини зберігаються.
Зупинимося ще на законі збереження маси для механічної системи. У квантово-релятивістській системі зберігається повна енергія системи, але маса окремих часток і маса системи не зберігаються, оскільки можуть зникати одні і утворюватися інші частки, у тому числі безмассовые. Запишемо формулу закону збереження енергії з обліком (1.8) і (2.8):
 6.8)
6.8)
Оскільки в класичній моделі матерія представлена тільки мате-риальными точками, що взаємодіють на відстані, то энерги-ей поля, передавального взаємодію, в порівнянні з енергією спокою матеріальних точок слід нехтувати, а у формулі (6.В) опустити другі суми. Нехтуючи також кінетичною енергією по сравне-нию з енергією спокою, отримуємо:
 (7.8)
(7.8)
 (8.8)
(8.8)
маса ізольованої механічної системи матеріальних точок зберігається. У цьому ж наближенні справедливе положення об ад-дитивности маси. Маса тіла дорівнює сумі мас частин, на які його розділили; при з'єднанні двох або більш за тіла в одне, маса тіла, що утворилося, дорівнює сумі мас сполучених тел. (Але це ув'язнення несправедливе для мікрочасток.)
27. Механічна система матеріальних точок. Сукупність матеріальних точок, між якими має місце силова взаємодія, називається механічною системою матеріальних точок або просто механічною системою. Прикладом механічної системи може служити Сонячна система, тверде тіло - незмінна система точок і так далі
Рух системи в механіці визначений, якщо відомий рух кожної точоки.
Система називається вільною, якщо координати і швидкості точок системи можуть набувати будь-яких значень залежно від сил, прикладених до них, і початкових умов руху. Якщо координати і швидкості точок системи задовольняють деяким умовам - зв'язкам, то система називається скованою. Якщо зв'язок виражається рівнянням, в яке входять лише координати точок, то такий зв'язок називається голо-номним, що утримує і стаціонарною. Коли в рівняння зв'язків входить час, зв'язки називаються нестаціонарними, а коли зв'язки виражені нерівностями, вони називаються такими, що не утримують. Всі останні зв'язки, рівняння яких задаються диференціальними неінтегрованими рівняннями, називаються неголономними.
Внутрішні і зовнішні сили. Замкнута і ізольована системи. Сили, що діють на точки системи, у багатьох випадках виявляється корисним підрозділяти на внутрішніх і зовнішніх.
Інакше, внутрішні сили - це сили взаємодії між крапками самої системи. Як правило, внутрішні сили задаються безпосередньо як сили попарної взаємодії між крапками. Вони залежать лише від відстані між точками, мають центральний характер і підпорядковуються третьому закону Ньютона. (Поняття силового поля для внутрішніх сил не застосовується.)
Зовнішніми називаються сили, прикладені до точок системи з боку тіл, що не належать системі, тобто сили, що діють на систему, що знаходиться в зовнішньому силовому полі.
Вказаний підрозділ сил на зовнішніх і внутрішніх визначається вибором самої системи. Одні і ті ж сили можуть бути в одному випадку внутрішніми, а в іншому - зовнішніми, залежно від того, які тіла включаються в дану систему.
Система, в якій діють лише внутрішні сили, називається механічно замкнутою. У такій системі розглядаються всі тіла, що взаємодіють між собою. Це означає, що вона ізольована від зовнішніх силових полів. Тому в механіці говорять про замкнуту або ізольовану систему.
Проте поняття ізольованої системи, якщо розглядати не лише механіку, не еквівалентно замкнутою; все механічно взаємодіючі частини даної системи можуть бути враховані, але система не ізольована, оскільки випробовує зовнішній, не механічний вплив. Наприклад, в систему поступає енергія при нагріванні; система випробовує дію зовнішнього поля, віднести яке до механічної взаємодії точок не можна, і так далі
Внутрішні сили володіють важливою властивістю: геометрична сума векторів внутрішніх сил, прикладених до точок системи, звана головним вектором внутрішніх сил, дорівнює нулю. Позначивши через  рівнодійну внутрішніх сил, прикладених до кожної -ої точки системи, маємо:
рівнодійну внутрішніх сил, прикладених до кожної -ої точки системи, маємо:

Ця рівність виходить з третього закону Ньютона; внутрішні сили зводяться до попарних взаємодій точок системи, і на підставі формули (5.8) геометрична сума сил взаємодії дорівнює нулю.
Головний момент внутрішніх сил, що діють в системі, тобто геометрична сума моментів внутрішніх сил, прикладених до точок системи, відносно довільно вибраної моментної точкидорівнює нулю. Позначимо

Запишемо математичне вираження вказаної властивості:
28. Диференціальні рівняння руху системи. Умови рівноваги. Напишемо основні векторні рівняння динаміки для п точок системи:

У них -  рівнодійна зовнішніх сил, а
рівнодійна зовнішніх сил, а  внутрвшніх.
внутрвшніх.
Отримали систему з п векторних рівнянь. Проектування цих рівнянь на осі декартових координат приводить до  диференціальним скалярним рівнянням руху системи. Ці рівняння дозволяють в принципі, як і в динаміці точки, вирішувати два основні завдання: визначати сили по заданому руху системи і визначати рух системи по заданих силах. Але на практиці при рішенні, другого завдання динаміки системи виникають великі математичні труднощі і її точні рішення для системи з трьох і більш матеріальних точок невідомі. Тому великого значення набувають спільні теореми динаміки системи, що дозволяють просто знаходити перші інтеграли руху, а по ним робити істотні висновки про характер і особливості руху системи в конкретних випадках.
диференціальним скалярним рівнянням руху системи. Ці рівняння дозволяють в принципі, як і в динаміці точки, вирішувати два основні завдання: визначати сили по заданому руху системи і визначати рух системи по заданих силах. Але на практиці при рішенні, другого завдання динаміки системи виникають великі математичні труднощі і її точні рішення для системи з трьох і більш матеріальних точок невідомі. Тому великого значення набувають спільні теореми динаміки системи, що дозволяють просто знаходити перші інтеграли руху, а по ним робити істотні висновки про характер і особливості руху системи в конкретних випадках.
Але в теоретичному плані рівняння (13.3) вичерпують питання про рух системи точок. По координатах точок системи і їх швидкостях, відомих в деякий момент часу, з допомогою (13.3) визначаються координати і швидкості точок у всі інші моменти часу. У цьому виявляється детермінізм або динамічна зумовленість механічного руху.
За допомогою рівнянь руху (13.3) можна отримати умови або рівняння рівноваги системи матеріальнихточок, перейти від динаміки до статики. В стані рівноваги всі точки системи повинні покоїтися, а це можливо лише за відсутності прискорень, отже, -  рівнодійна сил, прикладених до кожної крапки, дорівнює нулю.
рівнодійна сил, прикладених до кожної крапки, дорівнює нулю.
23. Робота сили. Потенційна енергія матеріальної крапки в словом поле.
Робота постійної сили  на прямолінійному переміщенні, створюючому з напрямом сили кут би, визначається формулою _
на прямолінійному переміщенні, створюючому з напрямом сили кут би, визначається формулою _

При змінній силі і русі по кривій таке визначення роботи непридатне. До загального визначення роботи (для змінної сили і довільного руху) приходимо звичайним способом: застосовуємо математичний аналіз.
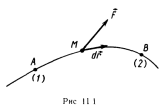
Хай траєкторією матеріальної крапки служить крива АВ (мал. 11.1). Розбиваємо відрізок кривої між крапками (1) і (2) на нескінченно малі елементи, які можна розглядати як прямолінійні. Хай  — вектор нескінченно малого переміщення і — вектор сили для даного положення крапки на кривій. Тоді остання формула може бути застосована для обчислення роботи сили на нескінченно малому переміщенні. Враховуючи це, отримаємо для елементарної роботи: _
— вектор нескінченно малого переміщення і — вектор сили для даного положення крапки на кривій. Тоді остання формула може бути застосована для обчислення роботи сили на нескінченно малому переміщенні. Враховуючи це, отримаємо для елементарної роботи: _
 (11.1)
(11.1)
У загальному випадку лінійна функція диференціалів координат в (МУЛ) не є повним диференціалом якої-небудь функції координат. Щоб відзначити цю обставину в позначенні елементарної роботи, застосована буква  ._
._
Для визначення роботи на кінцевій ділянці кривої АВ потрібно підсумувати елементарні роботи. Таким чином, сума алгебри елементарних робіт на всіх елементах дуги кривої АВ між вказаними точками кривої (1) і (2) є робота сили на кінцевій ділянці траєкторії:

Коротко роботу сили можна визначити як інтеграл від сили, узятий уздовж траєкторії руху крапки. (У математиці такі інтеграли називаються криволінійними.)
Для обчислення роботи сили в загальному випадку необхідно знати кінематичні рівняння руху крапки. Тоді криволінійний інтеграл в (11.2) може бути зведений до певного інтеграла.
Действительно, пусть  — кинематические уравнения движения (тогда
— кинематические уравнения движения (тогда  и т. д.) и проекции силы
и т. д.) и проекции силы  после внесения в них значений координат и производных координат по времени будут известными функциями времени. Таким образом, элементарная работа будет иметь вид:
после внесения в них значений координат и производных координат по времени будут известными функциями времени. Таким образом, элементарная работа будет иметь вид:

де  — відома функція часу. Далі з рівнянь руху визначаємо моменти часу
— відома функція часу. Далі з рівнянь руху визначаємо моменти часу  і
і  відповідні знаходженню крапки в положеннях (1) і (2). Це дасть нам межі інтеграції по
відповідні знаходженню крапки в положеннях (1) і (2). Це дасть нам межі інтеграції по  . Остаточно маємо: _
. Остаточно маємо: _

тобто робота обчислюється як певний інтеграл від функції часу.
24. Потенційні сили. Потенційна енергія матеріальної точки в силовому полі. Потенційними силами називаються сили, не залежні від швидкості руху крапки
 (11.3)
(11.3)
і що задовольняють умові
 (11.4)
(11.4)
Тут U — скалярна функція, звана потенційною енергією і також не залежна від швидкості, тобто
 (11.5)
(11.5)
Умова потенційності сили (11.4) іноді виявляється незручною для практичного застосування, оскільки потрібне знання потенційної енергії, яку часто слід знаходити. Тому воно замінюється наступною еквівалентною умовою:
 (11.6)
(11.6)
бо  для будь-якої функції._
для будь-якої функції._
Умова (11.4) в проекціях на осі декартової системи координат виражається трьома рівністю:

а умова (11.6) приводиться до вигляду

Остання рівність не містить потенційної енергії, і для перевірки потенційності сили досить переконатися в справедливості будь-яких два з них. Відмітимо, що умови потенційності тривіально виконуються для силового поля, проекції сил в якому не залежать від координат, тобто однорідне поле потенційне.
Слід розрізняти стаціонарну і нестаціонарну сили. Стаціонарна явно від часу не залежить, і їй відповідає стаціонарне поле, що задається функціями:
 (11.7)
(11.7)
Нестаціонарною потенційною силою називається сила, яка явно залежить від часу, і потенційне поле є нестаціонарним; воно описується загальною формулою (11.5).
Розглянемо спочатку, як обчислюється робота і потенційна енергія в стаціонарному полі (11.7). Знайдемо елементарну роботу потенційної сили:

В цьому випадку
 (11.8)
(11.8)
 (11.9)
(11.9)
З формули (11.9) видно, що робота не залежить від форми траєкторії і визначається різницею потенційних енергій на початку і кінці відрізання траєкторії.
Потенційна енергія в будь-якій точці поля виражається за допомогою невизначеного інтеграла:
 (11.10)
(11.10)
і завжди обчислюється з точністю до довільної постійної З, якою можна надати будь-яке значення (якщо можливо, то найзручніше нуль). Вибір постійної З — початковій енергії — носить назву нормування (калібрування) потенційної енергії. Можливість довільного вибору початку відліку для V пояснюється тим, що величина потенційної енергії безпосередньо не вимірюється; вимірюється тільки робота, рівна різниці енергій.
19. Поняття в’язі. При аналізі поняття механічної сили був розглянутий випадок, в якому дія на матеріальну точку решти всіх точок системи описана як сила, що є функцією координат, швидкості і часу. В цьому випадку точку прийнято називати вільною. У механіці не враховують конструктивні особливості в’язі і класифікують їх по вигляду аналітичних виразів, якими вони задаються. Поверхня, як відомо з геометрії, задається рівнянням

Якщо в’язь задана цим рівнянням, то це означає, що точка може рухатися тільки по поверхні. Така в’язь називається такою, що утримує.
Якщо ж в’язь задана рівністю-нерівністю  те матеріальна точка може рухатися в області простору, обмеженою вказаною в (7.1) поверхнею. В цьому випадку в’язь називається такою, що не утримує. Наприклад, твердий стрижень завдовжки
те матеріальна точка може рухатися в області простору, обмеженою вказаною в (7.1) поверхнею. В цьому випадку в’язь називається такою, що не утримує. Наприклад, твердий стрижень завдовжки  закріплений одним кінцем на початку координат за допомогою кульового шарніра, а на другому кінці має ту, що розглядається нами рухому точку. Рух останньою буде обмежено утримуючим в’яззю
закріплений одним кінцем на початку координат за допомогою кульового шарніра, а на другому кінці має ту, що розглядається нами рухому точку. Рух останньою буде обмежено утримуючим в’яззю  ._
._
Найбільш простими в’язями є голономні. Це в’язі, що задаються рівняннями (7.1) алгебри або диференціальними рівняннями, які після інтеграції зводяться до тих же рівнянь (7.1). У свою чергу голономні в’язі підрозділяються на стаціонарних і нестаціонарних. В’язь здійснюється нерухомою поверхнею, що не змінює своєї форми. Рівняння  задає голономний нестаціонарний в’язь і здійснюється рухомою або такою, що деформується поверхнею. Як видимий, голономні в’язі залежать тільки від координат і не залежать від похідних координат.
задає голономний нестаціонарний в’язь і здійснюється рухомою або такою, що деформується поверхнею. Як видимий, голономні в’язі залежать тільки від координат і не залежать від похідних координат.
Всі остальні в’язі, рівняння яких задаються диференціальними неінтегрованими рівняннями, називаються неголономними. Найбільш складна в’язь задається рівнянням

тобто є неголономною, нестаціонарною і такою, що не утримує. Загальний же вид рівнянь в’язі, з якими ми зустрінемося далі, такий:

— це голономні, утримуючі, стаціонарні і нестаціонарні в’язі.
Задані сили і сили реакції. Завдання про рух скованої матеріальної точки в порівнянні з вільною видозмінюється таким чином: рух точки обмежений в’язями і на неї (незалежно від в’язі) діють відомі сили, вони називаються заданими силами. Потрібно відшукати кінематичні рівняння руху. За своєю природою, як вже про це мовилося, дія в’язі зводиться до сил, прикладених до рухомої точки. Тому при відомих рівняннях зв'язку виявляється можливим підібрати таку додаткову до заданих силу, яка впливає на рух точки так само, як і в’язь. Це положення носить назва принципу освобождаемости від в’язі. Додаткові сили, замінюючі в’язі, називаються реакціями в’язі. Фізично реакції в’язі мають однакову природу із звичайними силами.
Якщо в’язь замінити відповідною силою реакції, точка може розглядатися як вільна і для неї буде справедливе основне рівняння динаміки (6.1):
 . (7.4)
. (7.4)
Якщо заданих сил немає і точка покоїться, то накладення в’язі не може повідомити їй прискорення. Таким чином, сили реакції в’язі є пасивними силами; вони діють за наявності руху або заданих сил, інакше не існують. Задані сили можна з цієї ж причини назвати активними.
Познайомимося з найзагальнішими властивостями сил реакції. Якщо точка при накладеному зв'язку рухається по заданій нерухомій поверхні, то силу реакції завжди можна розкласти на дві складові; перша  направлена по дотичній до траєкторії; вона називається силою тертя, друга
направлена по дотичній до траєкторії; вона називається силою тертя, друга  — по нормалі до поверхні, називається нормальною реакцією. Отже_
— по нормалі до поверхні, називається нормальною реакцією. Отже_

Сила тертя завжди направлена протилежно швидкості руху точки._
За законом Кулона для сухого тертя сила тертя пропорційна нормальній реакції:
 (7.5)
(7.5)
Коефіцієнт пропорційності до називається коефіцієнтом тертя.
|
|