Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Тяговый расчет и устойчивость автогрейдеров
|
|
Тяговый расчет автогрейдера на рабочем режиме можно вести двумя методами:
а) по заданным параметрам ножа и характеристике технологи
ческого процесса, выполняемого машиной, определяется тяговое уси
лие, а затем параметры двигателя и масса машины;
б) по заданным параметрам двигателя и массе машины определя
ется свободная сила тяги, т.е. выявляются возможные технологичес
кие режимы работы автогрейдера с отвалами и другими видами смен
ного рабочего оборудования.
При проведении тягового расчета автогрейдера на рабочем режиме принимаются следующие условия и допущения:
Осуществляется резание и перемещение грунта.
Резание происходит при оптимальных углах установки ножа при работе на горизонтальном участке.
- 82 -
Величина свободной силы тяги на ведущих колесах принимается с учетом перераспределения массы по осям и при оптимальном значении коэффициента сцепления.
Грунты однородные, например третьей категории.
Режимы резания постоянные.
Состояние режущей кромки ножа соответствует техническим требованиям.
Налипание грунта на рабочую поверхность отвала отсутствует.
Возможность преодоления возникающих сопротивлений определяется максимальным значением окружной силы на ведущих колесах Рк тах, величина которой ограничивается условием сцепления шин с грунтом:
Рк max = Ф • Ссц) I W, (3.22)
где ф - коэффициент сцепления
Gcu - сцепная сила тяжести автогрейдера при действии на нож вертикальной, направленной вверх силы Р2, Н;
I W - сумма всех сопротивлений при работе автогрейдера.
При рабочем режиме автогрейдера сумма всех сопротивлений движению составит
I W = Wf + Wh + W-, + Wk. (3.23)
Сопротивление качению колес Wf, сопротивление движению на уклон Wh и сопротивление сил инерции Wd могут быть получены общими методами.
Сопротивление копанию отвалом Wk рассматривается состоящим из отдельных слагаемых, характеризующих сопротивление отдельных относительных движений грунта
- 83 -
Wk = Wp + Wnp + WB + Wn, (3.24)
где Wp - сопротивление грунта резанию;
Wnp - сопротивление перемещению призмы волочения;
WB - сопротивление грунта продвижению вверх по отвалу;
Wn ' - сопротивление грунта продвижению вдоль по отвалу.
Сопротивление грунта копанию при работе автогрейдера следует рассматривать для двух характерных случаев выполнения работы:
а) зарезание при установке отвала на угол v * 0 в верти
кальной плоскости;
б) планировочные работы при v = 0.
Для случая зарезания принимаем сопротивление резанию равным
h • 1
WD = k -----, Н. (3.25)
Р 2
Для планировочных работ с элементами резания сопротивление резанию будет
Wp = k- L- h, Н (3.26)
Сопротивление призмы волочению, как и при отвале бульдозера,
wnP = Gnp- frr • sln " Ф (З-27)
где Gnp - сила тяжести призмы волочения, определяемая при условии полного заполнения отвала грунтом, Н; frr - коэффициент трения грунта по грунту; ■ ф - угол захвата, т. е. угол установки отвала в горизонтальной плоскости.
- 84 -
Сопротивление грунта продвижению вверх по отвалу
Wb = Gnp'fMr'cos2 ^рез'3111 " Ф • Н (3.28)
Сопротивление грунта при движении вдоль отвала
wn = Grip-fMr-frr-cos ip • H (3.29)
где fMr - коэффициент трения грунта по отвалу;
^рез ~ Угол резания.
Необходимая сила тяги на ведущих колесах автогрейдера по условиям сцепления при рабочем режиме определяется зависимостью
Рк > I W (3.30)
в предположении, что окружная сила на колесах по условиям сцепления подсчитана с учетом перераспределения нагрузки на колеса в связи с упором ножа в грунт, т.е.
Рк' = Ф ■ ССц. Н (3.31)
Обеспечение указанного значения силы Рк должно проверяться по зависимостям
Мд-1тр - N 1тр
V < Рк = ---- П = 9550 -- • —- т\, Н (3.32)
г п г
в соответствии с заданной скоростью передвижения
п • г
v - 0, 377 —--, км/ч (3.33)
^-т р
- 85 -
В приведенных формулах:
Рк - окружная сила на ведущих колесах, Н;
1тр - передаточное отношение трансмиссии; • г - радиус качения пневматических шин ведущих колес, м;
Т1 - механический к. п. д. силовой передачи;
п - число оборотов вала двигателя в минуту;
N - мощность двигателя, кВт.
Скорости движения автогрейдера. Для обеспечения различных силовых и скоростных режимов движения современные автогрейдеры снабжаются многоступенчатыми коробками передач.
Скорости движения автогрейдеров, км/ч:
Рабочие скорости:
на первой передаче................ 3...4, 2
на высших передачах.............. 6...15
Транспортные скорости:............... 2 5...42
скорость на заднем ходу.......... 6...13
В связи с использованием сменного навесного оборудования (смесители, роторные снегоочистители) на автогрейдерах стали применять рабочие скорости порядка 0, 4...1, 0 км/ч.
Применение гидротрансформатора допускает бесступенчатое изменение скорости в пределах каждой передачи и позволяет уменьшить число передач.
Скорость на первой передаче может быть выбрана из выражения
v«= 1000 —---- n, (3.34)
где Рк - сила тяги по сцеплению, Н; • i - коэффициент запаса, i < 1.
- 86 -
Значение максимальной расчетной транспортной скорости автогрейдера vmax следует определять исходя из условий реализации максимальной мощности двигателя при движении автогрейдера на установившемся режиме по горизонтальной поверхности при заданном значении коэффициента сопротивления качению i = О, 025...О, 035.
Для автогрейдеров со всеми ведущими колесами, у которых удельная мощность двигателя выше, значение. vmax может оказаться завышенным. В этом случае максимальную транспортную скорость нужно ограничивать величиной 40...45 км/ч, так как движение с большей скоростью может вызвать большие динамические нагрузки на машину вследствие толчков и ударов, поскольку эластичной подвески у автогрейдеров нет.
Анализ кинематических параметров трансмиссии показывает, что у большинства современных автогрейдеров, имеющих восемь скоростей, передаточные числа подобраны по закону геометрической прогрессии. У автогрейдеров с меньшим количеством скоростей обычно увеличены диапазоны между высшими передачами при сохранении прежней структуры ряда рабочих передач.
Как известно, ряд передаточных чисел, выбранный по закону геометрической прогрессии, обеспечивают одинаковую степень 'загрузки двигателя при переходе с одной передачи на другую и относительно большее число передач в зоне низших скоростей. Эта особенность ряда передач наилучшим образом отвечает требованиям, предъявляемым к тяговым машинам и поэтому получила широкое распространение.
Располагая данными vmax (yi) и vmln и назначив число передач п0, нетрудно вычислить знаменатель геометрической прогрессии q по уравнению
- 87 -
----
Vmax
После этого можно определить промежуточные теоретические скорости
V2 ~ - V3 ~ о» V4 ~ я ' ' • - ' max ~ n _ 1
или ряд общих передаточных чисел.
Тяговый расчет автогрейдера можно проводить и по методике предложенной Д.П.Волковым.
В тяговом. режиме автогрейдер преодолевает сопротивления, подобные рассмотренным при работе бульдозера с поворотным отвалом. В связи с этим тяговый расчет автогрейдера ведется по зависимостям, приведенным в разделе 1.3. Нужный при этом один из главных параметров автогрейдера - его масса - может быть найден по заданным параметрам объекта строительства.
Автогрейдер массой G с тяговым усилием (кН)
РФ = GCII'g-(p = GonT4-< p-g (3.35)
может срезать стружку грунта площадью (м2)
Fc = Рф/lq, (3.36)
где GCy- сцепная масса;
Ф - коэффициент сцепления;
i - коэффициент, учитывающий колесную формулу ходовой части машины и обычно принимаемый X = 0, 7... О, 75 при формуле 1x2x3 и i = 1 при формулах 3x3x3, 1x3, 2x2x2;
kj - коэффициент удельного сопротивления грунта копанию, кПа.
- 88 -
Эта стружка может быть выражена через площадь Fp сечения
разрабатываемого автогрейдером кювета, канавы или корыта, зависи
мостью
Fc = РрКс/пд, (3.37)
где Кс - коэффициент, учитывающий неравномерность сечения стружки, Кс = 1, 25... 1, 35; Яд - число проходов машины при разработке грунта в кювете,
пд = 3...4. Отсюда оптимальная масса автогрейдера при заданном сечении кювета или канавы
Fp • Кс • к1
GonT = -------. (3.38)
g-ПдЧ-ф
Поперечная устойчивость автогрейдера. Получение наибольшей силы тяги по сцеплению нельзя рассматривать без учета обеспечения поперечной устойчивости всего автогрейдера, которая в основном зависит от правильного распределения нагрузки по мостам.
Колеса переднего и заднего мостов при работе автогрейдера с косопоставленным отвалом нагружаются не только продольными но и поперечными силами Si: s2.
При проектировании автогредера необходимо обеспечить соответствующую устойчивость хода как заднему, так и переднему мостам.При продольном смещении центра тяжести машины к заднему мосту может быть обеспечена большая поперечная устойчивость задних колес, но при этом недостаточно нагруженные передние колеса могут потерять необходимую устойчивость и автогрейдер начнет разворачиваться.
; - 89 - I
Значит, для каких-то определенных условий работы автогрейдера, которые характеризуются направлением и точкой приложения равнодействующей реакции грунта к отвалу N, существует наивыгоднейшее распределение нагрузки по мостам, обеспечивающее наибольшую силу тяги по сцеплению и наилучшую поперечную устойчивость машин.
|
|
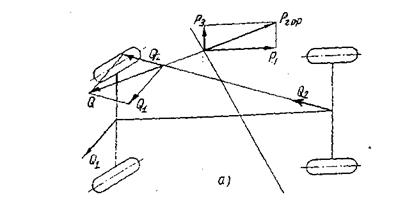
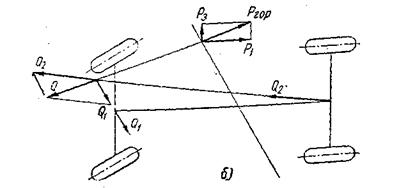
Нахождение наибольшей горизонтальной составляющей реакции грунта на ноже можно произвести по методу, предложенному инженером Горячко Б.В. Для этого необходимо рассмотреть равновесие сил в горизонтальной плоскости с учетом действия сцепных сил по мостам Oj; Q2 (рис. 3.14).
Риз. 3.14. Схема сил, действующих на автогрейдер в горизонтальной плоскости:
а) для автогрейдера'1x2x3;
б) для автогрейдера 1x3x3.
- 90 -
Для равновесия системы горизонтальная составляющая Ргор должна быть равна по величине и обратна по направлению равнодействующей сцепных сил мостов автогрейдера 0.
При полном использовании сцепления колес от силы тяжести машины и вертикальной составляющей реакции грунта Р2 горизонтальная составляющая будет равна
Prop = (G + Р2)" Ф > (З-39)
где ф - коэффициент сцепления.
Однако эта зависимость не учитывает использования сцепных качеств заднего и переднего мостов и поперечной устойчивости хода. Использование сцепных качеств мостов может быть отражено коэффициентом использования сцепных сил машины
Q
к = -------
Qi + Q2 '
который при косопоставленном ноже будет всегда меньше единицы, так как геометрическая сумма сил 0^ и Q2 меньше их алгебраической суммы.
Поперечная устойчивость автогрейдера характеризуется коэффициентом устойчивости хода кх:
Pi
kx --—,
_ rlmax
где Pi - предельная.составляющая реакции грунта на нож, при которой еще не теряется устойчивость хода при данной развеске (данном С2); pimax" продольная составляющая реакции грунта на нож, при которой еще не теряется устойчивость хода при наивыгоднейшей развеске (наивыгоднейшем С2).
- 91 -
Коэффициент кх зависит от распределения нагрузки по мостам. На графиках (рис. 3.7) показана такая зависимость на: примере трехосного автогрейдера; из рассмотрения графика видно, что наибольшая устойчивость хода, а значит, и наибольшая сила тяги по сцеплению для машины с передним ведомым мостом будет получена при коэффициенте распределения нагрузки на задний мост С2 = 0, 68 (68 % силы тяжести машины приходится на задний мост и 32 % - на передний). Для машины со всеми ведущими мостами наибольшее значение кх обеспечивается при С2 = 0, 52. Коэффициент кс с передним ведомым мостом колеблется в пределах кс= 0, 6...О, 9; для машин со всеми ведущими мостами кс = 0, 8...1, 0 - в зависимости от вида работы и углов захвата ножа.
Таким образом, действительное значение горизонтальной составляющей реакции грунта на ноже, обеспечивающей поперечную устойчивость машины, будет выражено
Prop = (G + Р2)-ф-кс-кх (3.40)
Величина Ргор при одинаковых значениях ср зависит от правильности распределения нагрузок по осям, необходимого для обеспечения поперечной устойчивости машине. Оптимальные значения коэффициентов кх и кс зависят от угла установки отвала в горизонтальной плоскости и от точки приложения реакции грунта к ножу.
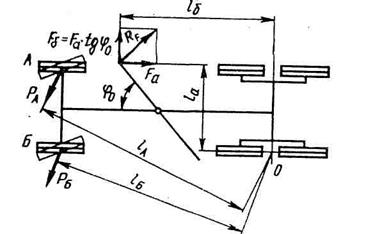
Проверку поперечной устойчивости машины проводят для случая, когда совершается копание одним из концов повернутого на угол ср0 отвала (рис. 3.15). На машину в этом случае будут действовать продольная и поперечная силы. Первая в наихудшем случае может достигать тягового усилия Fa. Вторая при этом составит
- 92 -
F6 = Fa ■ tg ф0.
(3.41)
|
Эти силы стремятся повернуть машину относительно одного из задних колес. От поворота машина будет удерживаться силами трения передних колес, появляющимися при их боковом скольжении по опорной поверхности.
Для обеспечения поперечной устойчивости автогрейдера необходимо, чтобы момент Мс перечной устойчивости автогрейдера сил сопротивления повороту был больше момента Мп поворачивающих сил или чтобы их отношение было больше единицы, т.е. при Ра - Рб:
Рис. 3.15. Схема к расчету поперечной устойчивости автогрейдера.
Mc Pa (1а + 1Б)
К = —^- =-------------------------------------- > 1, 1. (3.41)
Мп Fa (1а + 1б tg ф0)
|
|