Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Специфика периодических и дискретных процессов как объектов управления.
|
|
В промышленности существует большое количество приложений, использующих переключательные схемы для комбинационного и последовательностного управления. Теория переключательных схем, составляющая основу бинарного управления, используется не только в технологии автоматизации, но и во многих других областях. Именно эта теория лежит в основе работы цифровых ЭВМ. В общем случае бинарное комбинационное и последовательностное управление проще, чем традиционное аналоговое или цифровое управление с обратной связью, потому что использует как для измеряемых величин, так и для управляющих сигналов бинарные значения. Однако бинарное управление имеет свои особенности, которые будут рассмотрены более подробно.
Логические схемы традиционно реализовывались на основе разных технологий — до середины 1970-х годов большинство схем строилось на базе электромеханических реле или пневматических элементов, в 1970-е годы получили широкое распространение программируемые логические контроллеры, и сегодня последовательностное управление реализуется почти исключительно программными средствами. Несмотря на изменения в технологии, символическое изображение операций переключения с помощью принципиальных схем, которое восходит к ранней релейной технике, до сих пор используется для описания и документирования операций последовательностного управления, в том числе и реализуемого программно. Другой важный тип языка, который можно использовать не только для описания, но и как инструмент документирования, - это функциональные карты.
Теория переключательных схем позволяет создавать модели работы бинарных устройств, т. е. таких, которые могут быть только в одном из двух возможных состояний. Устройства, используемые в логических цепях, — выключатели, реле и двухпозиционные клапаны - работают только в двух состояниях. Любой транзистор - линейный элемент, т.е. не бинарный, но он может работать и как бинарный элемент если рассматривать только состояния " открыт" и " заперт". Бинарные датчики и исполнительные механизмы уже были рассмотрены ранее.
Состояние бинарного элемента отражается двоичной переменной, которая, соответственно, может принимать только два значения, традиционно обозначаемые либо «0» либо «1». Для выключателя, реле или транзистора (в дальнейшем обозначаемых буквой X) состояние X = 0 означает, что элемент разомкнут (не проводит ток) и X = 1 замкнут (проводит ток). Для кнопочных контактов и концевых выключателей X=0 означает, что контакт не приведен в действие, а X = 1 означает срабатывание.
Двоичная переменная может также соответствовать какому-нибудь уровню напряжения в реальной цепи. В схемах так называемой " положительной логики" большее напряжение соответствует логической " 1", а меньшее - логическому " 0". В системах ТТЛ двоичный " 0" обычно определяется уровнем напряжения от 0 до 0.8 В а двоичная " 1" - уровнем напряжения выше 2 В. Аналогично в пневмосистемах X = 0 может означать, что магистраль находится под атмосферным давлением, а X = 1 — под более высоким.
Для изображения логических - комбинационных и/или последовательностных цепей используются стандартные символы, которые не зависят от их фактической реализации.
Управление последовательностью событий и бинарное управление. Простой химический реактор, представленный на рисунке 9.1, — пример системы управления последовательностью событий. В химическом реакторе реагенты перемешиваются с помощью смесителя. Входные потоки реагентов и выход продукта регулируются входными клапанами А и Б и выходным клапаном В. Соответственно давление в баке контролируется датчиком Д, а температура - датчиком Т. Температура регулируется горячей или холодной водой, подаваемой в окружающий бак кожух; потоки воды регулируются клапанами Г (горячо) и X (холодно).
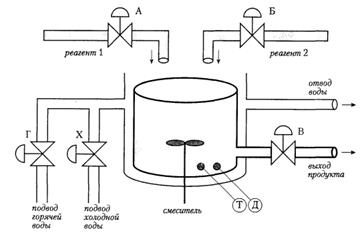
Рисунок 9.1 -. Простой химический реактор с регулированием температуры
В этом примере в реакторе выполняются следующие операции:
1) Открыть клапан А и залить в бак реагент 1.
2) Если датчик давления Д показывает, что достигнут требуемый уровень, то закрыть клапан А.
3) Запустить смеситель.
4) Открыть клапан Б и залить в бак реагент 2.
5) Если датчик давления Д показывает, что достигнут новый требуемый уровень, то закрыть клапан Б.
6) Открыть клапан Г для нагрева бака.
7) Если датчик Т показывает, что достигнута требуемая температура, то надо закрыть клапан Г.
8) Установить таймер на время протекания химической реакции.
9) При срабатывании таймера - время реакции истекло — остановить смеситель.
10) Открыть клапан X для охлаждения бака.
11) Проверить температуру в баке. Если температура упала ниже заданного предела, то закрыть Клапан X и открыть клапан В для опорожнения бака.
12) Закрыть клапан В. Повторить все этапы с самого начала.
Многие системы предназначены для управления очередностью выполнения операций, которая зависит от некоторых логических условий, как в приведенном примере.
Входные и выходные данные системы являются бинарными в том смысле, что датчики контролируют два состояния или граничное значение, например клапан открыт или закрыт, индикатор сработал или нет, кнопочный выключатель нажат или отжат и т. д.; и команды управления имеют аналогичный формат — запустить/остановить двигатель, включить/отключить нагреватель и т. п.
Если задача управления основана только на бинарной логике, то очевидно, что решать ее удобнее и проще цифровыми средствами. Существуют так называемые программируемые логические контроллеры, специально созданные для решения таких задач.
Управление процессом в реальном времени с использованием управляющего компьютера. Универсальность цифровых вычислительных машин как средства решения самых разнообразных задач, огромные объемы информации, перерабатываемые и хранимые в ЭВМ, мощные алгоритмические возможности сделали ЭВМ эффективным средством решения современных задач управления.
В современной теории и практике управления динамическими системами используются электронно-вычислительные машины (ЭВМ) или как их чаще теперь называют - промышленные персональные компьютеры (ППК) различных типов, отличающиеся принципом действия, составом элементной базы, возможностями использования в системах управления.
ППК общего назначения. Это такая архитектура вычислительных средств и программного обеспечения, которая позволяет единообразно решать большинство возникающих технических задач, включая задачи сопряжения с ЭВМ широкой номенклатуры внешних устройств и датчиков.
Использование ЭВМ общего назначения упрощает и ускоряет процесс разработки стандартного проекта в области автоматизации, однако конечное решение обычно не является оптимальным. ЭВМ общего назначения включает в себя стандартный набор компонентов.
· - Центральный процессор (один или несколько) и арифметический сопроцессор.
· - Быстродействующее запоминающее устройство.
· - Внешние накопительные устройства различной природы.
· - Мультимедийные (графическое и звуковое) устройства.
· - Терминал пользователя (дисплей, клавиатура, мышь и т.п.).
· - Средства сетевой поддержки.
· - Возможность подключения дополнительных интерфейсных устройств, в том числе, и в виде контроллеров, присоединяемых к шине ЭВМ.
· - Возможность установки разнообразного программного обеспечения.
Последние два свойства чрезвычайно важны, так как соответствуют открытости архитектуры такой ЭВМ. Именно открытость архитектуры PC совместимых компьютеров в 80-е годы 20 века сыграла решительную роль в повсеместном распространении этой техники. Свойство открытости архитектуры является непременным условием универсальности при широком применении.
Использование ЭВМ в контуре управления динамическими автоматическими системами связано с решением ряда проблем, вытекающих из особенностей ЭВМ как дискретной системы. В САУ с ЭВМ необходимо решать вопросы связи ЭВМ с объектом управления и работы ЭВМ в реальном масштабе времени, в ритме работы объекта управления. Связь ЭВМ с объектами управления усложняется при использовании цифровых машин для управления непрерывными автоматическими системами.
Укрупненная схема цифровой системы управления приведена на рисунке 9.2.

Рисунок 9.2 -.Укрупненная схема цифровой системы управления
Она содержит управляющую ЭВМ, объект управления ОУ, устройство ввода информации УВ и устройство, предназначенное для сопряжения ЭВМ с объектом, получившие название устройства сопряжения УС. Управляемый процесс (объект), как правило, имеет аналоговую природу, и связанные с ним сигналы у(t) и u(t) являются аналоговыми. Управляющая ЭВМ (а равно и любое другое цифровое устройство) имеет дело только с цифровой информацией, и сигналы на ее входах Ny и выходах Nu представлены цифровым кодом.
К современным измерительным устройствам относятся разнообразные датчики аналоговой природы, выходом которых являются электрические сигналы постоянного или переменного тока y(t), кодовые датчики, обеспечивающие получение параллельного цифрового кода Ny, а также импульсные измерительные устройства, на выходе которых получается импульсная последовательность nу. Цифровые измерительные устройства совместимы с цифровыми процессами в управляющей ЭВМ, что упрощает устройства ввода УВ.
Центральным элементом системы является управляющая ЭВМ, которая по заданному алгоритму осуществляет обработку информации от измерительных устройств и выполняет функции устройства управления (цифрового регулятора).
Важнейшими модельными особенностями управляющей ЭВМ как цифрового регулятора являются ее дискретность, циклический характер обработки информации и наличие запаздывания в процессе обработки сигналов. Дискретность обусловлена квантованием по уровню и времени всех вычислительных процессов, а, следовательно, и дискретным характером сигналов на входе Ny(kT) и выходе ЭВМ Nu(kT). Интервал квантования по времени задается с помощью таймера, а приращение по уровню зависит от разрядности ЭВМ. Для ЭВМ с достаточно большой разрядной сеткой квантованием по уровню обычно пренебрегают. Тогда сигналы Ny(kT) и Nu(kT) рассматриваются как стандартные амплитудно-модулированные импульсные последовательности (решетчатые функции).
Запаздывание, вносимое управляющей ЭВМ, вызвано потерями времени на ввод-вывод информации и вычисление управления по заданному алгоритму. С учетом запаздывания выходом ЭВМ следует считать дискретный сигнал Nu(kT-), смещенный относительно идеального сигнала на величину . Для упрощения модели системы запаздыванием либо пренебрегают, либо полагают равным одному интервалу дискретизации с выходным сигналом Nu((k-1)T).
В дальнейшем будем полагать, что работа всех устройств цифровой системы синхронизирована и происходит с интервалом дискретности Т, а их разрядные сетки одинаковы.
В функции устройств сопряжения с объектом входит промежуточное хранение цифровой информации и (при необходимости) преобразование аналоговых сигналов в цифровые и обратно.
Эквивалентная схема цифровой системы управления (см. рисунок 9.3). Для построения математической модели цифровой системы введем в рассмотрение некоторые специальные блоки:
Рисунок 9.3 -Эквивалентная схема цифровой системы управления
• квантователь непрерывных сигналов (рисунок 9.3 а), имеющий характеристику:
x1(kT) = x2(t) при t = kT; (9.1)
• фиксатор, или экстраполятор нулевого порядка (рисунок 9.3 б), описываемый выражением:
xl(t) = x2(kT) при t ∈ [kT, (k+1)Т); (9.2)
• звено запаздывания (элемент задержки на время t, (рисунок 9.3 в) с характеристикой:
x1(t) = x2(t-τ). (9.3)
Функциональная схема цифровой системы с объектом управления аналоговой природы и сигналы в различных ее точках приведены на рисунке 9.4 и 9.5. Схема представлена самим ОУ с аналоговыми измерительными и исполнительными устройствами, управляющей ЭВМ, таймером Т, обеспечивающим тактирование процессов с интервалом Т, и устройствами аналогового ввода-вывода. При рассмотрении пренебрежем эффектом квантования сигналов по уровню и различием между аналоговыми и цифровыми сигналами, принимая во внимание, что способ кодирования информации не влияет на информационное содержание сигналов. Работа цифровых систем управления аналоговыми процессами с цифровыми измерительными и исполнительными устройствами, инкриментными датчиками и иными типами цифровых устройств может рассматриваться по той же схеме и приводит к идентичной математической модели.
Рисунок 9.4 - Функциональная схема цифровой системы
Функциональная схема содержит АЦП, входным сигналом которого является непрерывный сигнал y(t) (точка А), а выходным кусочно-постоянный сигнал ỹ (t) = y(kT) (точка В), который поступает на вход следующего блока - входного регистра ВхР. Выходом последнего служит шина управляющей ЭВМ (точка С), на которой в моменты ввода информации t = kT появляется импульсный сигнал y(kT). Таким образом, первые два блока системы преобразуют непрерывный сигнал y(t) в квантованный по времени дискретный сигнал y(kT), т. е. представляют собой квантователь, при этом эффект квантования вызван периодическими обращениями ЭВМ к входному регистру.
Рисунок 9.5 - сигналы в различных точках цифровой системы
Дискретный сигнал y(kT) поступает в процессор ЭВМ, где производится расчет текущих значений управляющего воздействия. В идеальном случае на выходе ЭВМ (точка D) мгновенно формируется дискретный сигнал u'(kT). С учетом запаздывания - смещенная импульсная последовательность u'(kT-τ), где τ < Т, или, полагая для простоты τ =Т, сигнал u'((k-1)T).
В моменты времени t = kT- τ сигнал с выхода ЭВМ u'(kT- τ) поступает на выходной регистр ВыР, который обеспечивает его сохранение в течение интервала Т. Тем самым обеспечивается преобразование импульсной последовательности в кусочно-непрерывный сигнал ū '(kT- τ) (точка Е). Этот элемент схемы является фиксатором.
Цифроаналоговый преобразователь, как уже отмечалось, является пассивным элементом и поэтому сигнал на его выходе (точка F) по информационному содержанию совпадает с входным сигналом и является входным сигналом объекта управления.

Рисунок 9.6 - Эквивалентная схема цифровой системы управления
Эквивалентная схема цифровой системы управления, соответствующая ее математической модели для случая линейного объекта управления, линейного регулятора и запаздывания τ =Т приведена на рисунке 9.6. В состав схемы входит ОУ с передаточной функцией Wo(p), цифровой регулятор с передаточной функцией K(z), квантователь К, элемент задержки l/z и экстраполятор Э. В общем случае модель может включать каналы задающих воздействий и обратные связи по различным переменным системы.
Таким образом, ППК в системе автоматического управления осуществляет обработку информации о состоянии объекта, обеспечивает программное и оптимальное управление объектом. на рисунке 9.7 приведен пример схемы автоматического управления технологическим процессом на базе ППК.
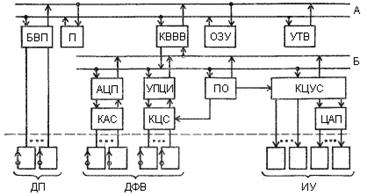
Рисунок 9.7- Пример схемы автоматического управления технологическим процессом на базе ППК
Вся совокупность устройств, подсоединенная к интерфейсу Б, образует систему связи ЭВМ с объектом. Состояние объекта характеризует информация, поступающая от датчиков физических величин (ДФВ). Эта информация после преобразования в соответствующих звеньях системы связи с объектом поступает в ЭВМ и составляет поток измерительной информации. От ЭВМ на входы исполнительных устройств (ИУ), приводящих объект в требуемое состояние, поступает поток управляющей информации в виде цифровых или аналоговых сигналов. Управляющая информация с каналов ввода-вывода (КВВВ) поступает в коммутатор цифровых управляющих сигналов (КЦУС), с которого передается либо непосредственно на исполнительные устройства дискретного типа, либо в цифроаналоговый преобразователь (ЦАП) для преобразования и последующей передачи на входы аналоговых исполнительных устройств.
К интерфейсу А вместе с каналами ввода-вывода подключен блок внешних прерываний (ВВП) процессора (П) и устройство текущего времени (УТВ). ВВП по сигналам от датчиков прерывания (ДП), связанных с объектом управления, и сигналам от УТВ формирует различные циклы обработки информации и управления объектом.
Коммутатор аналоговых сигналов (КАС) и коммутатор цифровых сигналов (КЦС), связанный с устройством приема цифровой информации (УПЦИ), составляют входной коммутатор системы управления, который осуществляет раздельное во времени подключение датчиков. Коммутатор цифровых управляющих сигналов (КЦУС) является выходным коммутатором, осуществляющим раздельное во времени подключение входов исполнительных устройств.
Исполнительные устройства используют либо аналоговые сигналы, либо дискретные, причем длительность дискретных сигналов обычно значительно превышает длительность сигналов управляющей информации. В связи с этим система связи ЭВМ с объектом управления должна содержать технические средства, запоминающие управляющую дискретную информацию до замены ее новой информацией или формирующие управляющие воздействия, воспринимаемые входами исполнительных устройств.
Связь ЭВМ с объектом в системе автоматического управления может быть синхронной, асинхронной и комбинированной.
При синхронной связи процесс управления с помощью тактовых сигналов устройства текущего времени (УТВ) разбивается на циклы одинаковой продолжительности. Каждый цикл начинается с появлением тактового сигнала на входе блока прерывания. Вначале цикла осуществляется последовательный опрос датчиков, контролирующих состояние объекта управления. Сигналы датчиков преобразуются в форму, необходимую для ввода этих сигналов в ЭВМ. Поступившая в ЭВМ информация обрабатывается, и формируются управляющие воздействия на объект, которые после соответствующего преобразования в системе связи ЭВМ с объектом передаются на исполнительные устройства. Затем ЭВМ либо останавливается, либо выполняет другие программы, не связанные с системой автоматического управления. Выполнение этих программ прерывается следующим тактовым сигналом УТВ. Управляющие воздействия, сформированные в начале цикла, остаются неизменными в течение всего цикла.
При асинхронной связи с объектом ЭВМ реагирует на сигналы прерывания, поступающие от датчиков прерывания, непосредственно связанных с объектом. Каждому сигналу прерывания соответствует переход ЭВМ к выполнению соответствующей программы, определяемой характером прерывания. Сигналы прерывания отрабатываются ЭВМ с учетом уровня приоритета.
При комбинированной связи ЭВМ с объектом управление осуществляется как по тактовым сигналам УТВ, так и по сигналам прерывания, например по сигналам аварийного режима объекта управления.
В ряде случаев целесообразно использовать прямое цифровое управление объектом на базе ЭВМ. В этих случаях ЭВМ выполняет функции регулятора контура управления. Датчик заданных значений величин, сложение задающих сигналов, сигналов обратных связей и регулятора реализуются в виде программных алгоритмов, а устройство сбора и регистрации переменных состояния и выдачи управляющих воздействий - в виде программируемого функционального устройства. Алгоритмы прямого цифрового управления могут быть построены подобно алгоритмам аналогового регулирования.
Существенно расширяются возможности управления в системах, функционирующих на базе микро-ЭВМ. Здесь становится возможным использовать все преимущества микропрограммирования, позволяющего реализовать набор машинных команд стандартных ЭВМ, а также специальные наборы команд для определенных областей управления. Кроме того, можно реализовать конструкции языка программирования высокого уровня, ядро операционной системы реального времени, диагностические функции для быстрого обнаружения ошибок и сбоев. Возможность распараллеливания на микропрограммном уровне отдельных элементарных операций позволяет значительно повысить быстродействие исполнения алгоритмов.
|
|