Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Наближена й елементарна методики
|
|
Відповідно до цих теорій закономірності роботи мають такий вигляд:
Переміщення точки D визначається, виходячи з переміщення точки В з урахуванням співвідношення довжин пліч балансира  :
:
 , м. (1.7.12)
, м. (1.7.12)
Швидкість точки D одержимо, продиференціювавши рівняння (1.7.12):
 , м/с. (1.7.13)
, м/с. (1.7.13)
Прискорення знаходиться у такій залежності:
 , м/с2. (1.7.14)
, м/с2. (1.7.14)
Отримані формули досить прості і можуть використовуватися для наближених обчислень із прийнятною для практики точністю. З їхньою допомогою неважко визначити, що максимальний шлях  буде при значенні
буде при значенні  = 180°, тобто довжина ходу точки підвісу штанг становитиме:
= 180°, тобто довжина ходу точки підвісу штанг становитиме:
 . (1.7.15)
. (1.7.15)
Максимального значення швидкість досягне при кутах повороту кривошипа = 90, 270° і буде дорівнювати
 . (1.7.16)
. (1.7.16)
Максимальне прискорення буде при = 0 та 180° і дорівнюватиме:
 .
.
Наведені вище рівняння описують закон руху точки підвісу штанг за припущення, що траєкторія руху точки В — пряма. Якщо нехтувати також і величиною відношення  , як це приймається в елементарній методиці, то з отриманих залежностей одержимо
, як це приймається в елементарній методиці, то з отриманих залежностей одержимо
 (1.7.17)
(1.7.17)
 (1.7.18)
(1.7.18)
 . (1.7.19)
. (1.7.19)
З аналізу цих залежностей випливає, що для балансирного верстата-качалки, в якого довжина радіуса кривошипа дуже мала порівняно з довжиною шатуна і балансира, закон руху точки підвісу штанг є гармонійним (рисунок 1.7.8).
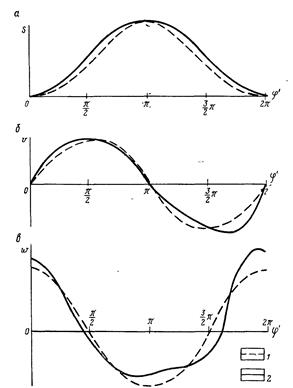
Рисунок 1.7.8 – Залежність переміщення (а), швидкості (б) і прискорення (в) від кута повороту кривошипа:
1 — визначена за спрощеною методикою; 2 — визначена за точною методикою
Гармонійний закон руху точки підвісу штанг (криві позначені пунктиром) – своєрідний еталон, із яким порівнюють фактичні закони руху точки підвісу штанг, що відрізняються від гармонійного в силу кінцевих довжин елементів перетворюючого механізму і низку інших факторів, одним із яких є нерівномірність обертання кривошипа.
Вплив співвідношення довжин елементів перетворюючого механізму може бути проілюстровано відношенням максимального прискорення, визначеного вище, до максимального прискорення при гармонійному русі
 (1.7.20)
(1.7.20)
Таким чином, навіть при аналізі наближених формул можна переконатися, що закон руху точки підвісу відрізняється від гармонійного в напрямі збільшення максимальних прискорень.
Силовий аналіз
Для міцнісного розрахунку елементів верстата-качалки, її зрівноважування і вибору привідного електродвигуна необхідно знати залежності, що описують зміну діючих зусиль протягом подвійного ходу.
Одним з найважливіших силових факторів є тангенціальне зусилля, що діє на палець кривошипа.
Для балансирного верстата-качалки тангенціальне зусилля, що діє на палець кривошипа, визначається за формулою
 , (1.7.21)
, (1.7.21)
де  – швидкість руху точки В – з’єднання балансира із шатуном;
– швидкість руху точки В – з’єднання балансира із шатуном;  – кутова швидкість обертання кривошипа;
– кутова швидкість обертання кривошипа;  – радіус кривошипа;
– радіус кривошипа;  – відстань від центра ваги балансира до осі хитання;
– відстань від центра ваги балансира до осі хитання;  – радіус інерції маси;
– радіус інерції маси;  – загальна вага балансира з вантажем, що врівноважує
– загальна вага балансира з вантажем, що врівноважує 
 ; – тангенціальне прискорення точки В;
; – тангенціальне прискорення точки В;  – вага вантажу, що врівноважує, на кривошипі;
– вага вантажу, що врівноважує, на кривошипі;  – кут повороту кривошипа.
– кут повороту кривошипа.
Наведена формула є узагальненою, що дає змогу обчислити тангенціальну силу протягом подвійного ходу точки підвісу штанг. З неї випливає, що зусилля визначається навантаженням Р0 (рисунок 1.7.9) у точці підвісу штанг, положенням кривошипа і балансира, тангенціальним прискоренням балансира, співвідношенням довжин окремих елементів верстата-качалки, ваги і маси окремих деталей та вантажів, що врівноважують.
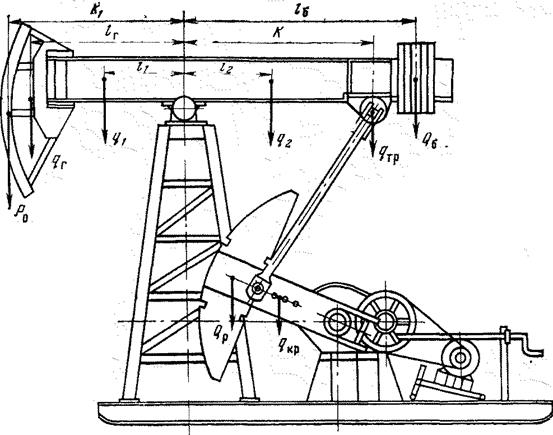
Рисунок 1.7.9 – Схема зусиль, що діють на балансирний верстат-качалку:
 – зусилля в точці підвісу штанг;
– зусилля в точці підвісу штанг;  – вага голівки балансира;
– вага голівки балансира;  – вага переднього плеча балансира;
– вага переднього плеча балансира;  – вага заднього плеча балансира;
– вага заднього плеча балансира;  – вага траверси;
– вага траверси;  – вага балансира;
– вага балансира;  – вага врівноважувального вантажу, встановленого на кривошипі
– вага врівноважувального вантажу, встановленого на кривошипі
Для комбінованого зрівноважування

 ; (1.7.22)
; (1.7.22)
для балансирного зрівноважування:
 ; (1.7.23)
; (1.7.23)
для роторного зрівноважування:
 . (1.7.24)
. (1.7.24)
Якщо установка не врівноважена взагалі, то рівняння приймає вигляд
 . (1.7.25)
. (1.7.25)
|
|