Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Структурная схема и описание авторулевого устройства
|
|
ОМСКИЙ ИНСТИТУТ ВОДНОГО ТРАНСПОРТА
(ФИЛИАЛ)
ФЕДЕРАЛЬНОГО бюджетного ОБРАЗОВАТЕЛЬНОГО
УЧРЕЖДЕНИЯ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ «НОВОСИБИРСКАЯ ГОСУДАРСТВЕННАЯ АКАДЕМИЯ ВОДНОГО ТРАНСПОРТА»
Структурное подразделение СПО
ОМСКОЕ КОМАНДНОЕ РЕЧНОЕ УЧИЛИЩЕ ИМЕНИ КАПИТАНА ЕВДОКИМОВА В.И.
Конспект лекций
по дисциплине:
«Автоматика судовых энергетических установок и вспомогательных механизмов»
для подготовки к Итоговой
государственной аттестации выпускников специальности: 190502 «Эксплуатация судовых энергетических установок»
Часть I Теоретический этап
Г.
| Одобрено: Цикловой методической комиссией судоводительских и судомеханических дисциплин Протокол № 1 от 30 августа 2012 г. | Составлено: в соответствии с Государственными требованиями к минимуму содержания и уровню подготовки выпускника по специальности: 190502 «Эксплуатация судовых энергетических установок» | |
 Председатель ЦМК
____________/В.В.Гринимеер/ Председатель ЦМК
____________/В.В.Гринимеер/
| 
| Заместитель начальника УМО ____________ /Е.В.Кушнаренко/ |
| Автор: | 
| В.В.Гринимеер |
СОДЕРЖАНИЕ
Автоматика СЭУ и ВМ – теоретический этап.. 3
Структурная схема и описание авторулевого устройства. 3
Виды и принцип действия автосцепов. 4
Схема дистанционной отдачи якоря. 8
Устройство для дистанционной отдачи буксирного троса. 9
Принцип действия указателя длины якорной цепи. 9
Автоматическая швартовная лебедка. 10
Установка для приготовления питьевой воды «ОЗОН-0, 5». 11
Устройство и работа пожарных извещателей. 12
Газоанализатор «ОРСа». 14
Приборы для измерения давления. 16
Приборы для измерения температуры.. 19
Приборы для измерения угловой скорости. 23
Автоматическое управление паровых котлов. 24
Гидромеханический регулятор давления пара. 26
Регулятор уровня воды с конденсационным сосудом. 27
Форсуночный агрегат АФ-65. 28
Принцип действия регулятора вязкости «ВАФ-ВИСКОТЕРМ». 29
Регулятор вязкости «Евроконтроль». 30
Общие принципы регулирования температур. 31
Дистанционный регулятор температуры.. 32
Регулятор температуры прямого действия. 33
Назначение и классификация регуляторов частоты вращения. 35
Чувствительные элементы регуляторов частоты вращения. 36
Регулятор частоты вращения прямого действия. 36
Регулятор частоты вращения непрямого действия. 37
Регулятор частоты вращения дизеля 6ЧСП 15/18. 39
Регулятор частоты вращения дизеля 6ЧРН 32/48. 40
Регулятор частоты вращения дизеля 6ЧСП 18/22. 41
Регулятор частоты вращения дизеля 6ЧСП 27, 5/36. 42
Регулятор частоты вращения дизеля 6ЧРН 36/45. 44
Принцип работы регулятора температуры топлива. 46
Назначение и устройство электромагнитного топливного клапана. 46
Электромагнитный предельный выключатель двигателя. 47
Прибор для замера зазоров П31 и П31М.. 47
Прибор определения равномерности распределения нагрузки по цилиндрам. 48
Автоматическое оборудование по очистке нефтесодержащих вод. 49
Контроль за рамовыми подшипниками коленчатого вала. Прибор ПДВ1. 50
Автоматическое удаление фекальных вод. 51
Автоматизация котлов-утилизаторов. 52
Список используемой литературы.. 54
Автоматика СЭУ и ВМ – теоретический этап
Структурная схема и описание авторулевого устройства
На заранее заданном курсе судно может быть удержано специальными устройствами – авторулевыми. В качестве источника информации о положении судна относительно заданного курса в схеме авторулевых обычно используют гироскопические компасы, индукционные измерительные преобразователи и вращающиеся трансформаторы.
|
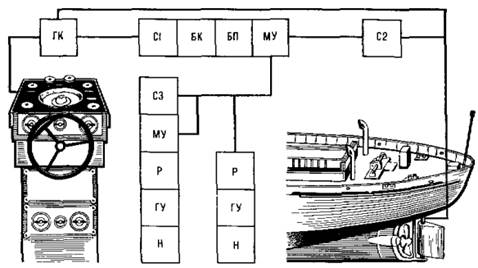
| Рисунок 1 – Структурная схема авторулевого |
Измерительные преобразователи реагируют на поворот судна вокруг вертикальной оси и при отклонении фактического курса от заданного воздействуют на рулевой привод, изменяющий положение пера руля относительно диаметральной плоскости судна.
Структурная схема одного из авторулевых, установленных на пассажирских теплоходах с гидравлическими рулевыми машинами, показана на рис. 1. Ручное управление выполняется дистанционно по следящей системе регулирования, т. е. при установке штурвалом поста управления заданного курса.
Электрогидравлическая рулевая машина Н через магнитный усилитель МУ, перестановочный редуктор Р и гидроусилитель ГУ перекладывает руль на соответствующий угол. Обратная отрицательная связь обеспечивается сельсинами С2 и С3. При переходе рулевой машины на автоматический режим работы заданный курс по гирокомпасу ГК поддерживается сельсином С1.
Сигнал управления поступает в обмотки управления магнитного усилителя МУ через электронные блок питания БП и блок коррекции БК. Всякое отклонение судна от заданного курса воспринимается сельсином С2 и в элементы авторулевого через гирокомпас ГК и сельсины С1, С3 поступает сигнал, пропорциональный углу отклонения судна от заданного курса. Сельсин С3 в этом случае воздействует через магнитный усилитель МУ и редуктор Р на гидроусилитель ГУ, управляющий подачей насоса рулевой машины, до тех пор, пока угол рассогласования между ним и сельсином С2 не станет равным нулю.
|
|