Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Регулирование координат электропривода. Основные показатели регулирования
|
|
Основная функция электропривода состоит в управлении его координатами - скоростью и моментом, т.е. в их принудительном направленном изменении в соответствии с требованиями технологического обслуживаемого процесса.
Очень важный частный случай управления координатами - регулирование скорости или момента, т.е. принудительное изменение этих величин в установившемся режиме в соответствии с требованиями технологического процесса посредством воздействия на механическую характеристику двигателя. Частным случаем регулирования является поддержание одной из координат на требуемом уровне при независимом изменении другой координаты.
Чаще всего регулируемой координатой служит скорость: необходимо изменять скорость транспортного средства в зависимости от условий движения, состояния дороги и т.п., нужно регулировать скорость насоса, чтобы обеспечивать нужный напор в системе водоснабжения, требуется поддерживать на заданном уровне скорость движения жилы кабеля в процессе наложения на нее изоляции и т.п.
Понятие “ регулирование скорости ”, когда используются разные характеристики (рис. 7, а), не следует смешивать с изменением скорости, даже значительным, которое вызывается ростом или снижением нагрузки и происходит в соответствии с формой данной механической характеристики (рис. 7, б).
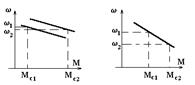
а) б)
Рис. 7. Регулирование (а) и изменение (б) скорости
В ряде случаев оказывается необходимым регулирование момента. Оно потребуется, например, если нужно качественно укладывать на катушку проволоку, получаемую с волочильного стана, если при буксировке судна на больших волнах надо не допустить обрыва троса и т.п. Далее мы будем, в основном, рассматривать регулирование скорости.
Поскольку регулирование скорости связано с направленным формированием механических характеристик, выделим одну из возможных характеристик в качестве основной. Обычно в качестве основной характеристики принимают естественную характеристику двигателя, соответствующую номинальным значениям определяющих ее величин (напряжение, частота, магнитный поток и т.п.). Далее мы будем конкретизировать условия получения естественной характеристики для каждого типа двигателя.
Все другие характеристики, создаваемые в целях регулирования скорости, будем называть искусственными. Они могут формироваться разными способами, отличающимися как по техническим, так и по экономическим показателям, рассматриваемым ниже.
1. Направление регулирования. Искусственные характеристики, могут располагаться только ниже естественной - однозонное регулирование вниз от основной скорости, только выше естественной - однозонное регулирование вверх от основной скорости, как выше, так и ниже естественной - двухзонное регулирование.
2. Диапазон регулирования - отношение максимальной возможной скорости к минимальной  при заданных изменениях момента нагрузки - рис. 8. Легко видеть, что одинаковым естественным характеристикам и изменениям момента
при заданных изменениях момента нагрузки - рис. 8. Легко видеть, что одинаковым естественным характеристикам и изменениям момента  могут соответствовать сильно различающиеся диапазоны регулирования, что связано с жесткостью искусственных характеристик.
могут соответствовать сильно различающиеся диапазоны регулирования, что связано с жесткостью искусственных характеристик.
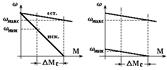
а) б)
Рис. 8. К определению диапазона регулирования скорости
С жесткостью характеристик связан также еще один показатель - стабильность скорости на искусственных характеристиках. Она может быть низкая - рис. 8, а и высокая рис. 8, б; иногда требуется абсолютно жесткие характеристики ( ), иногда, напротив, нужны очень мягкие характеристики (регулирование момента).
), иногда, напротив, нужны очень мягкие характеристики (регулирование момента).
3. Плавность регулирования - возможность получать искусственные характеристики, расположенные как угодно близко друг к другу, - плавное регулирование или, наоборот, возможность иметь лишь несколько фиксированных характеристик - ступенчатое регулирование.
4. Допустимая нагрузка на искусственных характеристиках - очень важный показатель, определяющий надежность электропривода. Рассмотрим здесь лишь длительно допустимую нагрузку, которая определяется допустимым нагревом двигателя.
Допустимая нагрузка на естественной характеристике известна по определению - это номинальный момент двигателя Мн. Для упрощения задачи будем считать, пренебрегая изменением теплоотдачи, допустимым током в силовых целях при любой скорости номинальный ток двигателя Iн. Тогда допустимый момент для принудительно охлаждаемого двигателя  (5) будет зависеть от магнитного потока двигателя Ф на соответствующей искусственной характеристике. При регулировании с Ф = Фн = const Мдоп є IнФн = Мн. Грубая оценка (5) дает лишь общее представление о допустимых нагрузках и должна уточняться в каждом конкретном случае.
(5) будет зависеть от магнитного потока двигателя Ф на соответствующей искусственной характеристике. При регулировании с Ф = Фн = const Мдоп є IнФн = Мн. Грубая оценка (5) дает лишь общее представление о допустимых нагрузках и должна уточняться в каждом конкретном случае.
5. Экономичность регулирования оценивается потерями энергии, сопровождающими тот или иной способ регулирования. Иногда экономичность удается грубо оценить, сравнивая полезную мощность  с потребляемой из сети Р1, т.е. определяя потери
с потребляемой из сети Р1, т.е. определяя потери  или вычисляя КПД
или вычисляя КПД  в некоторой характерной точке:
в некоторой характерной точке:
 . (6) Значительно более серьезные и убедительные оценки экономичности регулирования при сравнении различных способов могут основываться на цикловом КПД
. (6) Значительно более серьезные и убедительные оценки экономичности регулирования при сравнении различных способов могут основываться на цикловом КПД 
 , (7) определяемом с учетом конкретных условий работы привода за время цикла tц.
, (7) определяемом с учетом конкретных условий работы привода за время цикла tц.
6. Затраты на регулирование можно определить как стоимость дополнительного оборудования Ст. Обор., используемого для осуществления регулирования. Эффективность затрат удобно оценивать сроком их окупаемости Ток
 (8), где Год.эфф. - цена годового эффекта от использования регулирования.
(8), где Год.эфф. - цена годового эффекта от использования регулирования.
34. 34 Регулирование частоты вращения АД изменением нап ряжения в схеме асинхр.вентильного каскада (АВК)
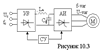
В электроприводе по схеме асинхронного вентильного каскада АВК регулирование частоты вращения осуществляется изменением противо- ЭДС инвертора, вводимой в цепь выпрямленного тока ротора асинхронного электродвигателя с фазным ротором. Вентильный двигатель - электромеханическая система, состоящая из преобразователя частоты, синхронного электродвигателя и устройства, указывающего положение его ротора в пространстве.Энергия скольжения ротора рекуперируется в питающую электрическую сеть через преобразователь АВК.
 Он состоит из двух основных элементов: неуправляемого выпрямителя и зависимого инвертора. Согласующий трансформатор необходим в том случае, если номинальное напряжение питающей сети отличается от номинального напряжения преобразователя АВК.
Основные достоинства:
-меньшая установленная мощность и простота
управления по сравнению с ПЧ-АД.
-возможность при аварии в преобразователе
перейти в нерегулируемый режим (закоротив ротор)
или в режим с пониженной частотой вращения
при введении в цепь ротора резистора Он состоит из двух основных элементов: неуправляемого выпрямителя и зависимого инвертора. Согласующий трансформатор необходим в том случае, если номинальное напряжение питающей сети отличается от номинального напряжения преобразователя АВК.
Основные достоинства:
-меньшая установленная мощность и простота
управления по сравнению с ПЧ-АД.
-возможность при аварии в преобразователе
перейти в нерегулируемый режим (закоротив ротор)
или в режим с пониженной частотой вращения
при введении в цепь ротора резистора
|
35. 35 Частотно-регулировочный электропривод.Законы частотного регулирования
 В частотно – регулируемом электроприводе питание двигателя осуществляется вентильным преобразователем частоты ПЧ, в котором постоянная частота питающей сети преобразуется в переменную. Пропорционально частоте изменяется частота вращения электродвигателя, подключенного к выходу преобразователя.Достоинства системы ПЧ-АД: высокий КПД в широком диапазоне регулирования скорости АД; хорошие регулировочные свойства, обеспечивающие возможность плавно регулировать скорость и формировать требуемые характеристики и законы регулирования; надежность используемого в системе АД с короткозамкнутым ротором.
Законы частотного регулирования
1.Основной закон изменения напряжения при частотном регулировании: где: МС1 и МС2 – моменты статической нагрузки, соответствующее работе двигателя при частотах f1 и f2;
U11 U12- напряжение на двигателе при тех же частотах. В частотно – регулируемом электроприводе питание двигателя осуществляется вентильным преобразователем частоты ПЧ, в котором постоянная частота питающей сети преобразуется в переменную. Пропорционально частоте изменяется частота вращения электродвигателя, подключенного к выходу преобразователя.Достоинства системы ПЧ-АД: высокий КПД в широком диапазоне регулирования скорости АД; хорошие регулировочные свойства, обеспечивающие возможность плавно регулировать скорость и формировать требуемые характеристики и законы регулирования; надежность используемого в системе АД с короткозамкнутым ротором.
Законы частотного регулирования
1.Основной закон изменения напряжения при частотном регулировании: где: МС1 и МС2 – моменты статической нагрузки, соответствующее работе двигателя при частотах f1 и f2;
U11 U12- напряжение на двигателе при тех же частотах.
 При постоянстве момента статической нагрузки напряжение источника питания должно изменяться пропорционально его частоте. В этом случае для идеализированного двигателя сохраняется перегрузочнаяспособность (Мк=const) и закон изменения напряжения примет вид U1/ f1 = const, При постоянстве момента статической нагрузки напряжение источника питания должно изменяться пропорционально его частоте. В этом случае для идеализированного двигателя сохраняется перегрузочнаяспособность (Мк=const) и закон изменения напряжения примет вид U1/ f1 = const,
 При постоянстве мощности на валу двигателя в процессе регулирования скорости закон изменения напряжения:
При вентиляторной нагрузке закон изменения напряжения на статоре При постоянстве мощности на валу двигателя в процессе регулирования скорости закон изменения напряжения:
При вентиляторной нагрузке закон изменения напряжения на статоре
|
36. Преобразователи частоты для управления асинхронными двигателями ПЧ с управляемым выпрямителем
 По принципу формирования выходного напряжения или тока ПЧ можно подразделить на непосредственные преобразователи частоты (НПЧ, или циклоконверторы) и ПЧ со звеном постоянного тока. В НПЧ выходная кривая переменного напряжения (или тока) необходимой частоты, амплитуды и фазы формируется из кривых напряжения многофазной системы переменного тока на входе. В них выпрямление напряжения сети и его преобразование в напряжение или ток требуемой частоты выполняются в одном устройстве. Это обусловливает однократное преобразование энергии и высокое значение КПД, малые габариты и массу НПЧ. Они выполняются по тем же схемам, что и выпрямители (однофазные, многофазные, нулевые, мостовые). Недостатком НПЧ является ограниченный диапазон выходной частоты. При частоте питающей сети, равной 50 Гц, верхний предел регулирования / ПЧ осуществляет регулирование величины и частоты выходного напряжения. В настоящее время для реализации частотного управления машинами переменного тока применяют различные варианты преобразователей частоты (ПЧ), отличающихся принципом действия, схемными решениями, алгоритмами управления и т.д. Исключив из рассмотрения применявшиеся ранее электромашинные ПЧ с известными их недостатками, остановимся на современных статических преобразователях.
По принципу формирования выходного напряжения или тока ПЧ можно подразделить на непосредственные преобразователи частоты (НПЧ, или циклоконверторы) и ПЧ со звеном постоянного тока. По принципу формирования выходного напряжения или тока ПЧ можно подразделить на непосредственные преобразователи частоты (НПЧ, или циклоконверторы) и ПЧ со звеном постоянного тока. В НПЧ выходная кривая переменного напряжения (или тока) необходимой частоты, амплитуды и фазы формируется из кривых напряжения многофазной системы переменного тока на входе. В них выпрямление напряжения сети и его преобразование в напряжение или ток требуемой частоты выполняются в одном устройстве. Это обусловливает однократное преобразование энергии и высокое значение КПД, малые габариты и массу НПЧ. Они выполняются по тем же схемам, что и выпрямители (однофазные, многофазные, нулевые, мостовые). Недостатком НПЧ является ограниченный диапазон выходной частоты. При частоте питающей сети, равной 50 Гц, верхний предел регулирования / ПЧ осуществляет регулирование величины и частоты выходного напряжения. В настоящее время для реализации частотного управления машинами переменного тока применяют различные варианты преобразователей частоты (ПЧ), отличающихся принципом действия, схемными решениями, алгоритмами управления и т.д. Исключив из рассмотрения применявшиеся ранее электромашинные ПЧ с известными их недостатками, остановимся на современных статических преобразователях.
По принципу формирования выходного напряжения или тока ПЧ можно подразделить на непосредственные преобразователи частоты (НПЧ, или циклоконверторы) и ПЧ со звеном постоянного тока.

|
|
|