Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
электроприводов
|
|
В ЭП осуществляется регулирование координат в целях управления движением ИО. Реализация этого процесса осуществляется целенаправленным воздействием на ЭД с помощью СУ.
Очевидно, что СУ ЭП строятся по следующим общим и широко известным принципам:
1) в разомкнутых системах (рис.9.5) реализуется принцип управления по возмущению (принцип компенсации);
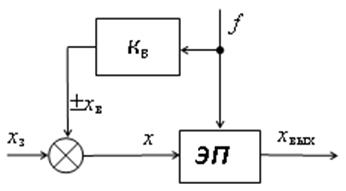
Рисунок 9.5 – Разомкнутая система управления
2) в замкнутых системах (рис.9.6) используется принцип управления по отклонению (принцип обратной связи).
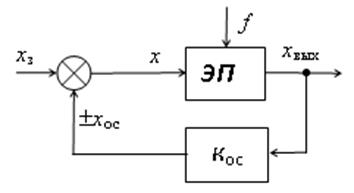
Рисунок 9.6 – Замкнутая система управления
В комбинированных системах управления используются оба указанных принципа (рис.9.7).

Рисунок 9.7 – Комбинированная система управления
В системах, реализующих принцип компенсации возмущающего воздействия f, входной сигнал х в, пропорциональный f, подается в систему вместе с задающим сигналом х з, в результате чего суммарный сигнал х обеспечивает такое управление ЭП, при котором осуществляются компенсации возмущений (см. рис.9.5). Такие системы используются значительно реже систем с обратными связями из-за отсутствия простых и надёжных датчиков нагрузки ЭП. Кроме того, в этих системах компенсируется только одно из действующих на систему возмущений. Но из-за своей простоты разомкнутые системы нашли широкое применение в ЭП для автоматизации его пуска, реверса и торможения.
Характерным признаком СУ ЭП, работающих по принципу отклонения, является подача на вход ЭП сигнала обратной связи х ос, пропорционального выходной величине х вых (см. рис.9.6). Этот сигнал сравнивается с задающим сигналом х з, и результирующий сигнал х (сигнал отклонения) является входным управляющим сигналом для ЭП. Если из-за действия возмущения f выходная величина х вых изменится, то соответствующим образом изменится и сигнал рассогласования х, а это приводит к изменению режима работы ЭП и восстановлению с определённой точностью прежнего уровня его выходной величины х вых.
Если производится регулирование двух или нескольких координат ЭП, то в системе используются и соответствующее число обратных связей. В этом случае может быть использована схема с общим суммирующим усилителем. Например, на рис. 9.8 представлена схема ЭП с регулированием трёх координат: положения МПУ х 1, скорости вращения вала двигателя х 2 и тока якоря (электромагнитного момента) х 3. Здесь ЭЧД и МЧД – соответственно электрическая и механическая части ЭД.
Основной признак такой схемы – использование суммирующего входного усилителя (У), а её достоинство – простота. Недостатком схемы является невозможность регулирования координат независимо друг от друга, следовательно, трудность достижения оптимального регулирования одновременно всех координат.
Эти недостатки устраняются в системах подчиненного регулирования координат с последовательной коррекцией. Их отличительная особенность – соответствие количества усилителей и замкнутых контуров числу регулируемых координат (рис. 9.9).
При этом замкнутые контуры располагаются таким образом, что выходной сигнал внешнего контура является задающим, входным сигналом внутреннего контура. Тем самым каждый внутренний контур оказывается подчиненным внешнему контуру. Применительно к схеме первым контуром является контур положения (координата х 1), которому подчинен внутренний по отношению к нему контур скорости (координата х 2), которому, в свою очередь, подчинен контур тока (момента) (координата х 3). Каждый контур имеет свой усилитель – У1, У2, У3. Такие усилители обычно называются соответственно регуляторами положения, скорости и тока (момента).
Такое построение системы позволяет осуществлять раздельное регулирование координат и раздельную (оптимальную) настройку качества процесса регулирования.
Текст лекцию составил доцент кафедры «Радиоэлектроника»
________Н.В. Руденко
|
|