Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Уравновешивание (увязка) углов
|
|
Вычисление средних значений углов
В журнале измерения углов произвели вычисление средних углов двумя полуприемами.
Первый угол считаем по К.П.(круг право), второй по К.Л.(круг лево). Затем находим среднее значение двух полученных углов.
Уравновешивание (увязка) углов
Теоретическая сумма ∑ β т углов замкнутого полигона, как сумма углов многоугольника, равна 180˚ · (n - 2), где n – число всех углов полигона.
Практическая сумма ∑ β пр углов полигона равна сумме измеренных углов в замкнутом полигоне ∑ β пр - ∑ β т = 0.
Вследствие неизбежных погрешностей возникает угловая невязка полигона fβ , которая определяется по формуле
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 8 |
| ЛИД 000000 014 ПЗ |
Получив угловую невязку нужно определить, допустима ли она. При измерении одноминутным теодолитом полным приемом предельная (допустимая) невязка в углах определяется по формуле
fдоп = ± 1, 5 √ n,
где fдоп – допустимая невязка, n – число углов.
Допустимая невязка должна быть искусственно устранена путем введения в измеренные углы некоторых поправок, по абсолютной величине равных полученной угловой невязке со знаком противоположным знаку невязки. Таким образом, сумма поправок должна точно равняться невязке с обратным знаком. Поправки должны быть таковы, чтобы ими по возможности меньше изменялись измеренные углы, поэтому поправки всех углов должны быть равны между собой. Однако это будет абсолютно верным при равноточных измерениях, т.е. когда углы имеют примерно одинаковые стороны, измеряются одним и тем же теодолитом и методом измерения.
Выше было выяснено, что чем короче сторона угла, тем большей может быть ошибка, поэтому большие поправки следует вводить в углы со сравнительно короткими сторонами. После исправления углов полигона приступают к вычислению дирекционных углов всех его сторон.
1.4 Вычисление дирекционных углов сторон хода
Предлагается следующая схема для их вычисления. Имеются 2 привязочных пункта полигонометрии ПП 87, ПП 88. Дирекционный угол α этой линии является исходным и для каждого варианта дается отдельно. Имея исходный дирекционный угол и журнал измерения горизонтальных углов, как основного полигона, так и привязочного хода, можно вычислить все дирекционные углы полигона по следующей схеме, рисунок 1.2.
Найти углы можно по формуле:
 , (1.1)
, (1.1)
где  - дирекционный угол последующей стороны теодолитного хода;
- дирекционный угол последующей стороны теодолитного хода;
 - дирекционный угол предыдущей стороны теодолитного хода;
- дирекционный угол предыдущей стороны теодолитного хода;
 - правый по ходу угол между названными сторонами теодолитного хода.
- правый по ходу угол между названными сторонами теодолитного хода.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 9 |
| ЛИД 000000 014 ПЗ |

α 1 – исходный дирекционный угол;
β 1, β 2 – угля привязки (правые по ходу);
α 2 – дирекционный угол привязки;
α 3 – дирекционный угол линии 1-2 основного полигона.
Рисунок 1.2 – Схема вычисления дирекционных углов
Контролем вычисления дирекционных углов служит получение дирекционного угла линии между вершинами 1 и 2 основного полигона, который вычисляется дважды, в начале и в конце ведомости координат с одинаковы результатом. После вычисления дирекционных углов их переводят в румбы. Перевод дирекционных углов в румбы приведен в таблице 1.1.
Таблица 1.1 – Перевод дирекционных углов в румбы
| Четверть | Знак | Зависимость между румбами и дирекционными углами | |
| x | y | ||
| I СВ | + | + | r = α |
| II ЮВ | - | + | r = 180˚ - α |
| III ЮЗ | - | - | r = α - 180˚ |
| IV СЗ | + | - | r = 360˚ - α |
Для линии ПП88-1: 
Для линии 1-2: 
Для линии 2-3: 
Для линии 3-4: 
Для линии 4-5: 
Для линии 5-6: 
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 10 |
| ЛИД 000000 014 ПЗ |

Для линии 1-2: 
1.5. Вычисление приращений координат
Приращения координат вычисляют по румбам и длинам сторон по формулам (1.2) и (1.3):
Δ Х= d· cos r (1.2)
Δ Y= d· sin r, (1.3)
где d – горизонтальное проложение;
r – румб линии.

Рисунок 1.3 – Схема вычисления приращений координат
По рисунку 1.3 видно, что приращения координат с геометрической точки зрения являются катетами прямоугольного треугольника, гипотенузой которого служит сторона полигона 1-2. Катет, изображающий Δ x, совпадает с направлением оси абсцисс, а так как последняя всегда располагается по меридиану, то значит и он совпадает с направлением меридиана. Таким образом катет Δ x образует с данной линией румб r.
Знаки приращений координат проставляются в зависимости от наименований румбов, представленных в таблице 1.2.
Таблица 1.2 – Знаки приращений координат
| Наименование румба | Знак | |
| Δ x | Δ y | |
| СВ | + | + |
| ЮВ | - | + |
| ЮЗ | - | - |
| СЗ | + | - |
Для линии ПП88-1: Δ x1 = d1 · cos r1 = 53, 95 · -0, 64 = -34, 64;
Δ y1 = d1 · sin r1 = 53, 95 · - 0, 76 = - 41, 35;
Для линии 1-2: Δ x2 = d2 · cos r2 = 154, 45 · - 0, 70 = - 109, 17;
Δ y2 = d2 · sin r2 = 154, 45 · - 0, 70 = - 109, 25;
Для линии 2-3: Δ x3 = d3 · cos r3 = 145, 25 · 0, 66 = 97, 24;
Δ y3 = d3 · sin r3 = 145, 25 · - 0, 74 = 107, 89;
Для линии 3-4: Δ x4 = d4 · cos r4 = 163, 30 · 0, 84 = 138, 51;
Δ y4 = d4 · sin r4 = 163, 30 · - 0, 52 = - 86, 48;
Для линии 4-5: Δ x5 = d5 · cos r5 = 152, 91 · 0, 83 = 128, 21;
Δ y5 = d5 · sin r5 = 152, 91 · 0, 54 = 83, 32;
Для линии 5-6: Δ x6 = d6 · cos r6 = 204, 55 · - 0, 51 = - 104, 92;
Δ y6 = d6 · sin r6 = 204, 55 · 0, 85 = 175, 59;
Для линии 6-1: Δ x7 = d7 · cos r7 = 156, 40 · - 0, 95 = - 149, 90;
Δ y7 = d7 · sin r7 = 156, 40 · 0, 28 = 44, 60.
1.6. Вычисление координат вершин полигона
В замкнутом полигоне ∑ Δ x = 0 и ∑ Δ y = 0, где ∑ Δ x, ∑ Δ y – сумма приращений координат.
В действительности, вследствие неизбежных погрешностей при измерении сторон и углов, эти суммы нулей не дадут, а дадут какие-нибудь величины fx и fy, которые называются невязками, в суммах приращений соответствующих координат.
На рисунке 1.4 показано, чем являются с геометрической точки зрения невязки в приращениях координат.

Рисунок 1.4 – Геометрический смысл невязки в периметре
замкнутого полигона
Если вычислить координаты всех вершин полигона, начиная от вершины 1 по вычисленным приращениям, то для начальной вершины 1 получим две пары координат: одна пара x и y, с которых вычисления начались, и другая пара x1, y1, полученные в результате суммирования приращений. Полигон не сомкнется на линию 1-1, которая называется невязкой в периметре полигона или линейной невязкой. Очевидно, что конечные координаты вершины 1, т.е. x1 и y1 будут отличаться от координат начальных x и y как раз на величину невязок fx и fy, т.е.  (1.4)
(1.4)
 (1.5).
(1.5).
Таким образом, с геометрической точки зрения невязки в приращениях – катеты прямоугольного треугольника, гипотенузой которого служит невязка в периметре fp. По теореме Пифагора вычисляется абсолютная линейная невязка:
 (1.6)
(1.6)
В практике употребляется относительная линейная невязка fотн, т.е. отношение fp/P, где P – периметр полигона.
 , (1.7)
, (1.7)
в теодолитных ходах не превышает М 1: 2000. Если относительная невязка допустима, то невязка fx и fy с обратным знаком распределяются на все приращения пропорционально длинам сторон. Координаты вершин полигона вычисляются по исправленным приращениям. Для этого берут опорную вершину 1 основного полигона, координаты которой получены из привязки и, начиная с этой опорной вершины полигона последовательным алгебраическим прибавлением исправленных приращений к предыдущим координатам получают координаты всех последующих вершин полигона.
Контролем вычислений служит то, что координаты вершины 1, образованные прибавлением приращений последней линии к координатам последней точки полигона должны совпасть с начальными.
Для вершины 1: x1 = xПП88 + Δ x1 = 1800, 0 + (- 34, 64) = 1765, 36;
y1 = yПП88 + Δ y1 = 1325, 0 + (- 41, 35) = 1283, 65;
Для вершины 2: x2 = x1 + Δ x2 =1765, 36 + (- 109, 16) = 1656, 19;
y2 = y1 + Δ y2 =1283, 65 – 109, 23 = 1174, 41;
Для вершины 3: x3 = x2 + Δ x3 = 1656, 19 + 97, 24 = 1753, 44;
y3 = y2 + Δ y3 = 1174, 41- 107, 87 =1066, 54;
Для вершины 4: x4 = x3 + Δ x4 = 1753, 44 + 138, 51 = 1891, 95;
y4 = y3 + Δ y4 =1066, 54 – 86, 46 = 908, 08;
Для вершины 5: x5 = x4 + Δ x5 = 1891, 95 + 128, 21 = 2020, 17;
y5 = y4 + Δ y5 = 908, 08 + 83, 33 = 1063, 42;
Для вершины 6: x6 = x5 + Δ x6 = 2020, 17 – 104, 91 = 1915, 25;
y6 = y5 + Δ y6 = 1063, 42 + 175, 60 = 1239, 03;
Контроль: x1 = x6 + Δ x7 = 1915, 25 – 149, 89 = 1765, 36;
y1 = y6 + Δ y7 = 1239, 03 + 44, 61 = 1283, 65.
1.7. Построение теодолитного хода
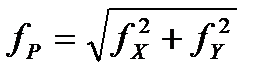
Следующим этапом является построение теодолитного хода по вычисленным координатам. Если в данном полигоне координаты по осям X и Y имеют значительную величину в данном масштабе, то на практике всегда вместе с осями координат строят сеть квадратов со сторонами в 10 см. Квадраты должны быть построены особенно точно. Для этой ели применяется линейка Дробышева, показанная на рисунке 1.5.
Рисунок 1.5 – Линейка Дробышева
Исходя из вычисленных координат строят необходимое число квадратов, затем подписывают сетку квадратов с таким расчетом, чтобы вершины теодолитного хода располагались по середине листа.
Проверка правильности построения вершин теодолитного хода выполняется сравнением графической длины линии хода с соответствующей горизонтальной проекцией. Расхождения не должны превышать 0, 2 мм.
Заключительным этапом работы является накладка на план ситуации. Для этой цели служат абрисы, выполненные в полевых условиях во время съемки на каждой станции.
Абрис – это чертеж местности, который делается от руки, на нем надписываются все полученные при съемке числовые значения.
Существующие методы съемки ситуации такие как, полярный метод, метод угловых засечек (биполярный) позволяют производить съемку местности с повышенной точностью. Криволинейные контуры, т.е. границы леса, растительности, сельхозугодья сняты методом прямоугольных координат, с помощью измерительной ленты.
2. Построение плана трассы лесовозной дороги
Вычисляем азимуты для данного варианта:


2.2. Расчет элементов круговых кривых
.
T1 = 248, 25 * 0, 9 = 223, 42;
K1 = 486, 66 * 0, 9 = 437, 99;
Д1 = 9, 84 * 0, 9 = 8, 85;
Б1 = 30, 35 * 0, 9 = 27, 31;
T2 = 156, 30;
K2 = 310, 09;
Д2 = 2, 51;
Б2 = 12, 14;
2.3. Составление ведомости углов поворота, прямых и кривых
Составить ведомость углов поворота, прямых и кривых по данным пикетажной книжки.
2.4. Построение плана трассы лесовозной автомобильной дороги
Построить план трассы лесовозной автомобильной дороги по румбам и расстояниям в М 1: 5000, используя данные ведомости углов поворота, прямых и кривых и пикетажной книжки.
Рекомендуется следующий порядок выполнения этой работы. Предварительно на кальке составить съему плана трассы по румбам и длинам сторон. Румбы и расстояния на схеме можно откладывать приближенно. На схеме должно быть показано направление С-Ю. Затем с помощью этой схемы нужно наметить на лист чертежной бумаги необходимого формата такое положение трассы, при котором нумерация пикетов будет возрастать слева – направо. Направление стрелки С-Ю может быть любым по отношению к листу чертежной бумаги. Затем с помощью транспортира, измерителя и линейки необходимо точно построить план трассы по румбам и длинам сторон в масштабе 1: 5000. От вершин углов поворота на плане трассы отложить в обе стороны тангенсы кривых и обозначить положение начала и конца кривых короткими черточками. Отложить биссектрису угла Б и обозначить середину кривой СК. Затем с помощью лекала нанести на план кривую по трем точкам НК, КК. Нанести на план пикетажные точки, ситуацию, румбы и длины сторон.
2.5. Обработка журнала технического нивелирования
Нанести на план трассы высотные отметки пикетов, которые вычисляются в журнале технического нивелирования, показанного в приложении 6. Нивелирование трассы производилось двухсторонними рейками. На каждой станции производился полевой контроль, т.е. отчеты по рейке велись по черной и красной сторонам рейки. Разница между пятками черной и красной сторонами равна 4684.
Обработку журнала технического нивелирования необходимо начать с вычисления превышений передних связующих точек над задними. Превышения вычисляются сначала только на первой странице журнала по формуле (2.8)
h = aзад – bперед, (2.8)
где h – превышения, a – отсчет задний; b – отсчет передний.
Вычисленные превышения, соответственно с их знаками, записать в графы журнала против передних отсчетов. Затем проветси постраничный контроль. Последовательно обработать все страницы журнала, найти алгебраическую сумму всех средних превышений ∑ hсредн. Всего нивелирного хода (по всему журналу) и записать ее в конце последней страницы журнала. Вычислить фактическую fн факт и допустимую fн дон (в мм) высотные невязки по формулам(2.9), (2.10)
fнфакт = ∑ hср – (Hреп2 – Hреп1) (2.9)
или
fнфакт = ∑ реп2вычисл – Hреп2задний (2.10)
fндоп. = ± 50 √ L,
где L – длина нивелирного хода, км.
Если fhфакт ≤ fhдоп, то увязку средних превышений в данном случае не производят. Для построения продольного профиля пользуются отметками, вычисленными в журнале технического нивелирования.
2.6. Обработка журнала тахеометрической съемки
Тахеометрическая съемка полосы трассы автодороги выполняется для того, чтобы полнее изобразить рельеф местности вдоль трассы автодороги. Имея отметки рельефа местности можно составить поперечные профили на любом пикете по всей длине трассы, с большей точностью подсчитать объем земляных работ в насыпях и выемках, правильно запроектировать водопропускные сооружения и т.д.
Для изображения рельефа необходимо иметь высоты характерных точек, а для определения высот знать их превышения, которые определяются методом наклонного луча.
Съемка производилась теодолитом-тахеометром, Т-30 при вертикальном круге лево на каждой станции, т.е. углы наклона близкие к 0˚, берутся со знаком «+», углы наклона близкие к 360˚ берутся со знаком «–». Соответственно знак вычисленного превышения берется по знаку угла наклона. Эти условия определяются для каждого теодолита-тахеометра отдельно.
Важное значение при измерении вертикальных углов имеет постоянство места нуля. Поскольку добиться равенства места нуля точно нулю невозможно, хотя бы потому, что точность отсчитывания имеет свои пределы, поэтому необходимо через определенное время работы выполнять проверки М.О. и своевременно исправлять положение. В предлагаемом для обработки тахеометрическом журнале имеется в виду, что значение М.О. близко к нулю и в вычислениях не учитывается.
Горизонтальное положение вычисляется в случае, если угол наклона больше 3˚ по формуле (2.11):
Д = d · cos ν, (2.11)
где d – расстояние, измеренное по дальномеру;
ν – угол наклона.
Отметки реечных точек вычисляются по формуле (2.12):
Hрт = Hст + h (2.12)
где Hрт – отметка реечной точки;
Hст – отметка станции;
h – превышения.
Превышение рассчитывается по формуле (2.13):
h = d · tg ν + i – v, (2.13)
где d · tg ν – превышение вычисленное;
i – высота прибора;
v – высота визирования.
Отметки станций получены по результатам обработки журнала технического нивелирования. После обработки журнала тахеометрической съемки, см. приложение 7, приступают к нанесению на план реечных точек. Образец нанесения на план реечных точек на рисунке 2.1. Данные для нанесения выбирают из вычисленного тахеометрического журнала.
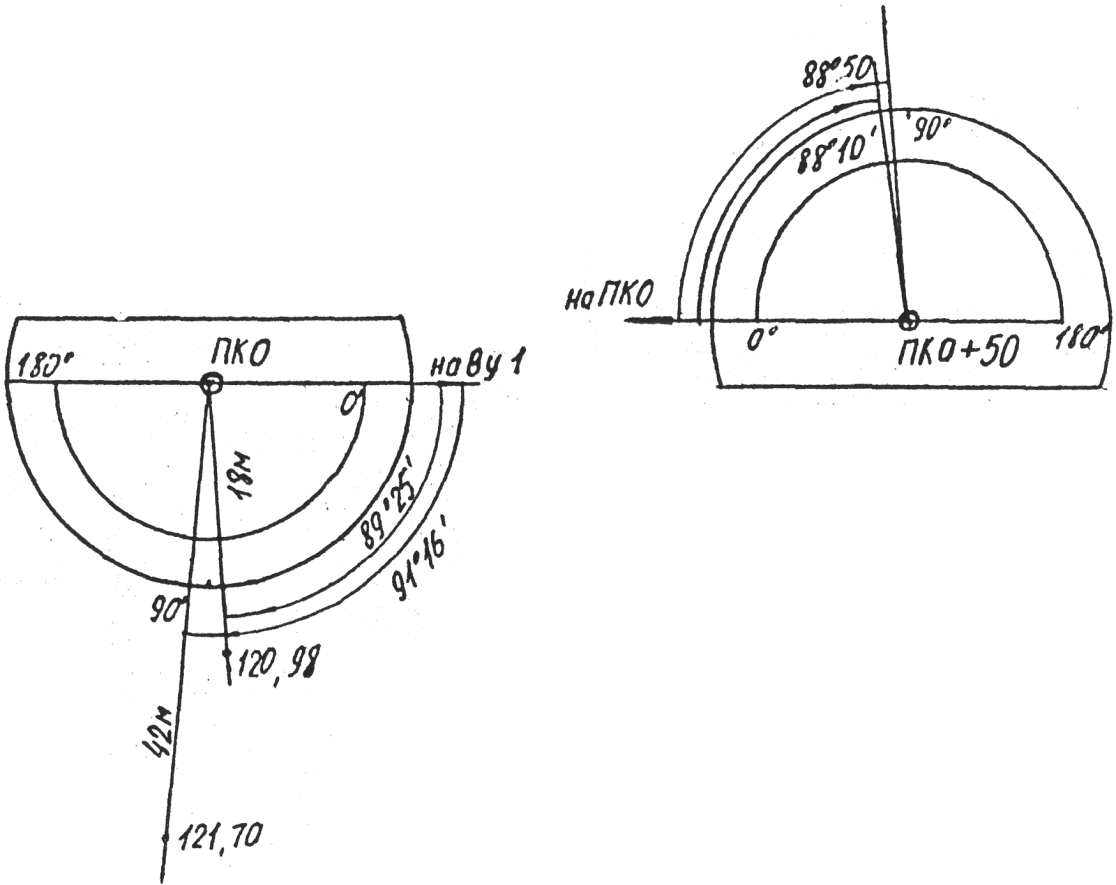
Рисунок 2.1 – Образец нанесения на план реечных точек
При съемке реечных точек на станции ПК 0 лимб теодолита ориентирован по направлению на следующую точку в направлении ВУ 1. С помощью транспортира вправо (по ходу часовой стрелки) от направления ВУ 1 откладывают горизонтальные углы (отсчеты по горизонтальному кругу), измеренные при визировании на реечные точки 1, 2, 3, 4. Получив на плане направление на эти реечные точки, от станции ПК 0 по этим направлениям откладывают в масштабе 1: 2000 значения соответствующих горизонтальных проложений. При съемке со всех последующих станций лимб ориентирован на предыдущую (заднюю) станцию. Поэтому при нанесении реечных точек на план горизонтальные углы откладывают по часовой стрелке от направления на предыдущую станцию.
Все горизонтальные проложения на реечные точки наносят на план с помощью измерителя и масштабной линейки. Полученные точки обводят окружность диаметром 1, 5 мм,, рядом записывают отметку точки, взятую из тахеометрического журнала. По отметкам станций и реечных точек на плане проводят горизонтали с сечением рельефа через 1 м. Построение горизонталей можно выполнить любым из известных методов, изучаемых в курсе инженерная геодезия.
2.7. Построение продольного профиля
Завершив в полном объеме обработку журналов, а также построение плана трассы, можно приступить к составлению продольного профиля. Для автомобильных дорог приняты масштабы: 1: 5000 - для горизонтальных расстояний и 1: 500 – для отметок точек.
Работа выполняется в следующем порядке:
Начертить сетку профиля в соответствии с образцом. Графу «Отметки земли» (черные отметки) заполнить отметками оси трассы, взятыми из плана трассы. Графу «План трассы» заполнить, пользуясь данными ведомости углов поворота прямых и кривых. Графа «Ситуация» заполняется по данным из пикетажной книжки. От линии условного горизонта (верхней горизонтальной линии сетки профиля) отложить отметки пикетажных точек (черные отметки) напротив вертикальных линий графы расстояний. Полученные точки соединить прямыми линиями. Получится ломаная линия, изображающая профиль земли по оси дороги. От этих точек провести вниз вертикальные линии до верхней горизонтальной линии сетки, в результате получим ординаты профиля. Затем на профиль наносится проектная (красная линия) дороги, согласно техническим условиям проектирования лесовозных дорог.
В учебных целях можно делать некоторые отступления от этих условий и провести красную линию дороги с небольшим числом участков, не принимая уклонов ≤ 30 %. Проектную линию наносят последовательно от участка к участку, при этом определяя уклон по формуле (2.14):
i = h/d, (2.14)
где h – превышение конечной точки данного участка проектной линии над начальной точкой этого участка, определяемое на профиле графически по масштабу;
d – Длина участка проектной линии, м.
Вычислить проектные (красные) отметки всех пикетажных точек, а также точек перелома проектной линии по формуле (2.15):
Hпр.пос. = Hпр.пред. ± i · d, (2.15)
где Hпр.пос. – проектная отметка последующей точки;
Hпр.пред. – проектная отметка предыдущей точки.
Вычисленные проектные отметки занести в соответствующую графу стеки профиля. Вычислить рабочие отметки земляного полотна дороги по формуле (2.16):
hраб. = Hпр. – Hч., (2.16)
где Hпр. – проектная отметка;
Hч. – отметка земли.
Полученные рабочие отметки выписать на профиле. Определить расстояние X до каждой точки нулевых работ от ближайшей предыдущей пикетажной точки по формуле (2.17):
 , (2.17)
, (2.17)
где h1раб. и h2раб. – рабочие отметки точек на профиле, между которыми находится точка нулевых работ;
d – расстояние между этими точками.
Определить расстояние Y от точки нулевых работ до последующей пикетажной точки по формуле (2.18):
 . (2.18)
. (2.18)
Вычисление расстояний до точки нулевых работ показано на рисунке 2.2.
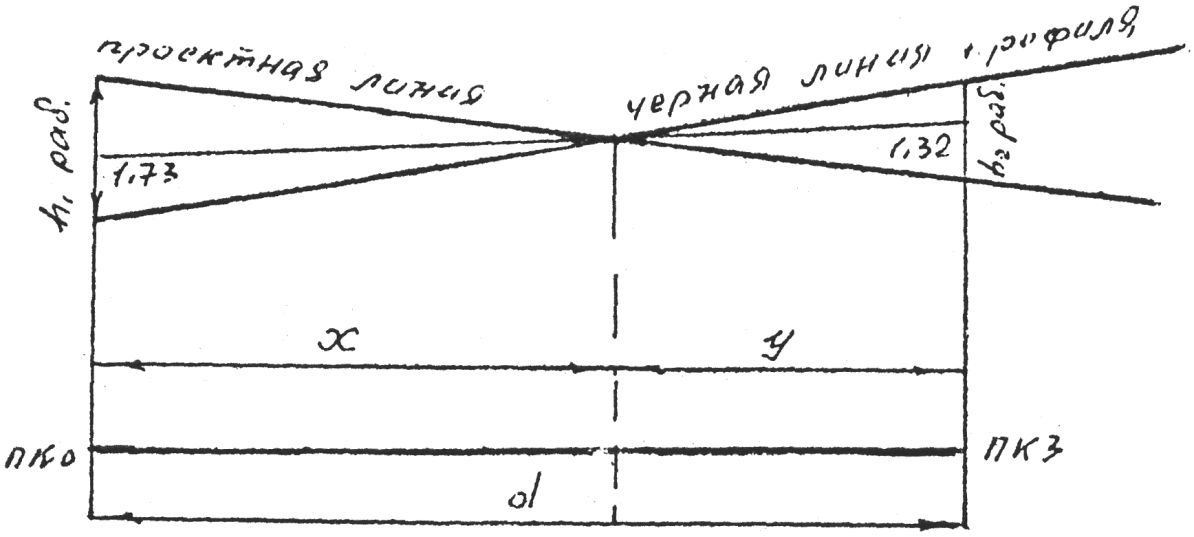
Рисунок 2.2 – Вычисление расстояний до точки нулевых работ
Данные для построение профиля поперечника взять из журнала тахеометрической съемки, где даны расстояний, горизонтальные углы и вычислены отметки реечных точек.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 21 |
| ЛИД 000000 014 ПЗ |
В данном курсовом проекте по исходным данным был построен план теодолитной съемки и спроектирован план лесовозной дороги (включающий продольный и поперечный профили и общий план лесовозной автодороги).
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| 22 |
| ЛИД 000000 014 ПЗ |
1. Требования к оформлению текстовых документов: методические указания. – Красноярск, 2001.
2. Требования к оформлению графических документов: методические указания. – Красноярск, 2001.
3. Болотова А.С., Булин О.В. Методические указания к курсовой работе «Геодезические работы при составлении плана теодолитной съемки и проектировании лесовозной дороги».
4. Инженерная геодезия. Учебник для вузов/ Клюшин Е.Б., Кисилева М.И. и др.; под ред. Михелева Д.Ш. – М.; Высш. Шк.; 2000.
Таблица П1 – Ведомость вычисления координат вершин теодолитного хода
| Номер вершины | Измеренный угол | Исправлен- ный угол | Дирекционный угол | Горизонтальное проложение | Приращения координат | Координаты | ||||||
| Вычисленные | Исправленные | |||||||||||
| Ход привязки от ПП 88 к точке 1 замкнутого хода | ||||||||||||
| ПП87 | ||||||||||||
 55, 18 55, 18
| 148, 35 | |||||||||||
| ПП88 | 72, 55, 3 | 1800, 0 | 1325, 00 | |||||||||
| 255, 39, 7 | 53, 95 | -34, 64 | -41, 35 | -34, 64 | -41, 35 | |||||||
| 1-а | 210, 38, 00 | 210, 38, 00 | 1765, 36 | 1283, 65 | ||||||||
| 225, 01, 7 | ||||||||||||
| Замкнутый ход | ||||||||||||
| 1765, 36 | 1283, 65 | |||||||||||
| 225, 01, 7 | 154, 45 | -109, 17 | –109, 25 | -109, 16 | –109, 23 | |||||||
| 92, 59, 30 | 92, 59, 7 | 1656, 195 | 1174, 41 | |||||||||
| 312, 02 | 145, 25 | +97, 24 | -107, 89 | +97, 24 | -107, 87 | |||||||
| 164, 00, 06 | 164, 00, 18 | 1753, 44 | 1066, 54 | |||||||||
| 328, 01, 7 | 163, 30 | +138, 51 | -86, 48 | +138, 51 | -86, 46 | |||||||
| 115, 00, 00 | 115, 00, 00 | 1891, 95 | 908, 08 | |||||||||
| 33, 01, 7 | 152, 91 | +128, 21 | +83, 32 | +128, 21 | +83, 33 | |||||||
| 92, 09, 24 | 92, 09, 36 | 2020, 17 | 1063, 42 | |||||||||
| 120, 52, 1 | 204, 55 | -104, 92 | +175, 59 | –104, 91 | +175, 60 | |||||||
| 137, 25, 36 | 137, 25, 54 | 1915, 255 | 1239, 03 | |||||||||
| 163, 26, 2 | 156, 40 | -149, 90 | +44, 60 | -149, 89 | +44, 61 | |||||||
Окончание прил. 1
Приложение 2
Таблица П2 – Ведомость прямых и кривых
| Номер точек | Кривые | Прямые | ||||||||||||
| ВУП | Угол | Элемент кривой | Пикетажные положения | Длины, м | Направления | |||||||||
| Право | Лево | Радиус Р | Тангенс Т | Кривая К | Биссектриса Б | Домер Д | Начало кривой НК | Конец кривой КК | Прямая вставка | Расстояние между в.у. | Азимут | Румб | ||
| ПК0 | ||||||||||||||
| 56, 88 | 280, 30 | 125˚ 20 | ЮВ: 54, 40 | |||||||||||
| ВУ1 | ПК2+8030 |  53 53
| - | 223, 42 | 437, 99 | 27, 31 | 8, 85 | ПК0+56, 88 | ПК4+94, 87 | |||||
| 24, 13 | 403, 85 | 153˚ 13 | ЮВ: 20, 47 | |||||||||||
| ВУ2 | ПК6+7530 | - |  46 46
| 156, 30 | 310, 09 | 12, 14 | 2, 51 | ПК5+19, 00 | ПК8+29, 09 | |||||
| 170, 91 | 327, 21 | ЮВ: 44, 33 | ||||||||||||
| 53
| 46
| 379, 72 | 748, 08 | 39, 45 | 11, 36 | 251, 92 | 1011, 36 |
∑ LП - ∑ LЛ =
∑ К + ∑ ПВ = 748, 08 + 251, 92
∑ расст., м ВУ – ∑ Д = 1011, 36 – 11, 36 = 1000
∑ 2Т – ∑ К = 2  379, 72 – 748, 08 = 11, 36
379, 72 – 748, 08 = 11, 36
Приложение 3
Таблица П3 – Вычисление журнала технического нивелирования
| Номер станции | Номер точки | Отсчеты на рейке, мм | Превышения, мм | Средние превышения, мм | Отметка, м | |||
| Задние | Передние | + | – | + | – | |||
| Реп.N1 | 6477 | 175, 18 | ||||||
| ПК0 | 6203 | 175, 453 | ||||||
| ПК0 | 6338 | |||||||
| ПК0+50 | 5366 | 176, 424 | ||||||
| ПК0+50 | 6681 | |||||||
| ПК1 | 5488 | 177, 617 | ||||||
| ПК1 | 6319 | |||||||
| ПК1+50 | 5671 | 178, 085 | ||||||
| ПК1+50 | 6475 | |||||||
| ПК2 | 5680 | 178, 88 | ||||||
| ПК2 | 6859 | |||||||
| ПК2+50 | 6117 | 179, 622 |
Продолжение прил. 3
| ПК2+50 | 6739 | |||||||
| ПК3 | 6071 | 180, 672 | ||||||
| ПК3 | 6836 | |||||||
| ПК3+50 | 6027 | 181, 506 | ||||||
| ПК3+50 | 6969 | |||||||
| ПК4 | 6098 | 182, 592 | ||||||
| ПК4 | 6812 | |||||||
| ПК4+50 | 6030 | 183, 662 | ||||||
| ПК4+50 | 7019 | |||||||
| ПК5 | 6271 | 184, 430 | ||||||
| ПК5 | 6694 | |||||||
| ПК5+50 | 5915 | 185, 568 | ||||||
| ПК5+50 | 6437 | |||||||
| ПК6 | 7164 | 184, 843 |
Продолжение прил. 3
| ПК6 | 6533 | |||||||
| ПК6+50 | 7662 | 183, 716 | ||||||
| ПК6+50 | 6362 | |||||||
| ПК7 | 7534 | 182, 546 | ||||||
| ПК7 | 6265 | |||||||
| ПК7+50 | 6794 | 182, 019 | ||||||
| ПК7+50 | 6163 | |||||||
| ПК8 | 6740 | 181, 444 | ||||||
| ПК8 | 6374 | |||||||
| ПК8+50 | 6915 | 180, 903 | ||||||
| ПК8+50 | 6193 | |||||||
| ПК9 | 7005 | 180, 093 | ||||||
| ПК9 | 6417 | |||||||
| ПК9+50 | 7094 | 179, 418 |
Окончание прил. 3
| ПК9+50 | 6513 | |||||||
| ПК10 | 7646 | 178, 287 | ||||||
| ПК10 | 6338 | |||||||
| Реп.N2 | 7529 | 176, 024 |
Находим невязку: Fфакт=∑ h-(Hреп2-Hреп1)
1.881 -(130, 650-129, 806)=1.037
Приложение 4
Таблица П4 – Вычисление журнала тахеометрической съемки
| Номер станции. Отметка станции | Номер точки наблю-дения | Расстояние по дальномеру, м | Отсчет по горизонтальному кругу, o / | Отсчет по вертикальному кругу, o / | Угол наклона, ν | Горизон- тальное проложение, ДМ | Вычисленные превышения, hМ | Отметки реечной точки, HМ |
| Станция ПК0 i=v H=175, 453 Лимб ориенти- рован на ВУ 1 | 89˚ 25’ 91˚ 16’ 270˚ 05’ 268˚ 17’ | 0˚ 50’ 1˚ 20’ 359˚ 25’ 359˚ 05’ | +0˚ 50’ +1˚ 20’ –0˚ 35’ –0˚ 55’ | +0, 26 +0, 98 –0, 15 –0, 61 | 175, 713 176, 433 175, 303 174, 843 | |||
| Тахеометрическая съемка на станциях с ПК0+50 по ПК10 производилась при ориентировании лимба на предыдущую (заднюю) точку по створу тахеометрического хода | ||||||||
| Станция ПК0+50 i=v H = 176, 424 | 88˚ 10’ 88˚ 50’ 270˚ 00’ 271˚ 10’ | 358˚ 55’ 358˚ 10’ 1˚ 05’ 1˚ 35’ | –1˚ 05’ –1˚ 50’ +1˚ 05’ +1˚ 35’ | –0, 38 –1, 44 +0, 34 +1, 30 | 176, 044 174, 984 176, 764 177, 724 | |||
| Станция ПК1 i=v H = 177, 617 | 87˚ 50’ 90˚ 05’ 269˚ 30’ 270˚ 04’ | 357˚ 55’ 357˚ 10’ 0˚ 50’ 1˚ 10’ | –2˚ 05’ –2˚ 50’ +0˚ 50’ +1˚ 10’ | –0, 55 –1, 98 +0, 29 +0, 88 | 177, 067 175, 637 177, 877 178, 497 | |||
| Станция ПК1+50 i=v H = 178, 085 | 85˚ 17’ 91˚ 30’ 270˚ 45’ 268˚ 05’ | 358˚ 05’ 357˚ 10’ 0˚ 35’ 1˚ 55’ | –1˚ 55’ –2˚ 50’ +0˚ 35’ +1˚ 55’ | –0, 57 –2, 13 +0, 27 +1, 54 | 177, 515 173, 105 178, 355 179, 625 |
Продолжение прил. 4
| Станция ПК2 i=v H = 178, 88 | 89˚ 45’ 89˚ 15’ 269˚ 18’ 269˚ 30’ | 358˚ 10’ 357˚ 45’ 1˚ 05’ 1˚ 59’ | –1˚ 50’ –2˚ 15’ +1˚ 05’ +1˚ 59’ | –0, 80 –1, 73 +0, 42 +1, 49 | 178, 08 177, 1 179, 3 180, 37 | |||
| Станция ПК2+50 i=v H = 179, 622 | 87˚ 31’ 88˚ 15’ 271˚ 40’ 269˚ 18’ | 359˚ 03’ 358˚ 31’ 0˚ 59’ 1˚ 47’ | –0˚ 57’ –1˚ 29’ +0˚ 59’ +1˚ 47’ | –0, 33 –1, 17 +0, 31 +1, 46 | 179, 292 178, 452 179, 932 181, 082 | |||
| Станция ПК3 i=v H = 180, 672 | 86˚ 10’ 88˚ 17’ 269˚ 10’ 270˚ 05’ | 358˚ 51’ 357˚ 47’ 1˚ 02’ 1˚ 57’ | –1˚ 09’ –2˚ 13’ +1˚ 02’ +1˚ 57’ | –0, 48 –1, 51 +0, 40 +1, 60 | 180, 192 180, 502 181, 142 182, 272 | |||
| Станция ПК3+50 i=v H = 181, 506 | 91˚ 30’ 92˚ 45’ 270˚ 04’ 271˚ 10’ | 359˚ 01’ 359˚ 48’ 1˚ 10’ 2˚ 55’ | –0˚ 59’ –0˚ 12’ +1˚ 10’ +2˚ 55’ | –0, 36 –0, 17 +0, 47 +2, 09 | 181, 146 181, 336 181, 976 183, 596 | |||
| Станция ПК4 i=v H = 182, 592 | 90˚ 28’ 93˚ 16’ 269˚ 44’ 271˚ 35’ | 358˚ 55’ 357˚ 37’ 0˚ 56’ 1˚ 10’ | –1˚ 05’ –2˚ 23’ +0˚ 56’ +1˚ 10’ | –0, 36 –1, 79 +0, 37 +0, 94 | 182, 232 180, 802 182, 955 183, 532 | |||
| Станция ПК4+50 i=v H = 183, 662 | 89˚ 37’ 91˚ 14’ 272˚ 48’ 270˚ 37’ | 358˚ 55’ 357˚ 37’ 1˚ 24’ 2˚ 57’ | –1˚ 05’ –2˚ 23’ +1˚ 24’ +2˚ 57’ | –0, 45 –1, 79 +0, 64 +2, 47 | 183, 212 182, 263 184, 302 186, 132 |
Продолжение прил. 4
| Станция ПК5 i=v H = 184, 430 | 89˚ 44’ 90˚ 27’ 269˚ 33’ 267˚ 19’ | 359˚ 05’ 358˚ 23’ 1˚ 20’ 2˚ 18’ | –0˚ 55’ –1˚ 37’ +1˚ 20’ +2˚ 18’ | –0, 40 –1, 24 +0, 47 +1, 73 | 184, 03 183, 19 184, 9 186, 16 | |||
| Станция ПК5+50 i=v H = 185, 568 | 91˚ 33’ 90˚ 49’ 273˚ 35’ 270˚ 04’ | 358˚ 59’ 357˚ 25’ 0˚ 48’ 1˚ 33’ | –1˚ 01’ –2˚ 35’ +0˚ 48’ +1˚ 33’ | –0, 41 –2, 08 +0, 31 +1, 19 | 186, 158 183, 488 185, 878 186, 758 | |||
| Станция ПК6 i=v H = 184, 843 | 88˚ 35’ 89˚ 15’ 268˚ 12’ 269˚ 39’ | 359˚ 17’ 358˚ 23’ 1˚ 21’ 2˚ 35’ | –0˚ 43’ –1˚ 37’ +1˚ 21’ +2˚ 35’ | –0, 26 –1, 24 +0, 54 +2, 12 | 184, 583 183, 603 185, 153 186, 963 | |||
| Станция ПК6+50 i=v H = 183, 716 | 88˚ 37’ 91˚ 42’ 274˚ 03’ 271˚ 12’ | 359˚ 14’ 358˚ 31’ 1˚ 23’ 2˚ 15’ | –0˚ 46’ –1˚ 29’ +1˚ 23’ +2˚ 15’ | –0, 33 –1, 19 +0, 58 +1, 69 | 183, 386 182, 526 184, 296 185, 406 | |||
| Станция ПК7 i=v H = 182, 546 | 91˚ 37’ 92˚ 25’ 268˚ 18’ 271˚ 30’ | 358˚ 56’ 359˚ 12’ 2˚ 01’ 2˚ 57 | –1˚ 04’ –0˚ 48’ +2˚ 01’ +2˚ 57’ | –0, 41 –0, 66 +0, 92 +2, 32 | 182, 136 181, 886 183, 466 184, 866 | |||
| Станция ПК7+50 i=v H = 182, 019 | 93˚ 05’ 90˚ 27’ 270˚ 14’ 271˚ 19’ | 359˚ 01’ 357˚ 33’ 1˚ 11’ 2˚ 39’ | –0˚ 59’ –2˚ 27’ +1˚ 11’ +2˚ 39’ | –0, 43 –1, 75 +0, 50 +1, 85 | 181, 589 180, 269 182, 519 183, 869 |
Окончание прил. 4
| Станция ПК8 i=v H = 181, 444 | 89˚ 41’ 92˚ 12’ 268˚ 35’ 271˚ 10’ | 359˚ 14’ 358˚ 35’ 1˚ 55’ 2˚ 48’ | –0˚ 46’ –1˚ 25’ +1˚ 55’ +2˚ 48’ | –0, 33 –1, 09 +0, 77 +2, 05 | 181, 114 180, 354 182, 214 183, 494 | |||
| Станция ПК8+50 i=v H = 180, 903 | 88˚ 35’ 91˚ 15’ 269˚ 30’ 270˚ 40’ | 359˚ 15’ 358˚ 40’ 1˚ 10’ 2˚ 35’ | –0˚ 45’ –1˚ 20’ +1˚ 10’ +2˚ 35’ | –0, 31 –1, 05 +0, 45 +1, 94 | 180, 593 179, 853 181, 353 182, 843 | |||
| Станция ПК9 i=v H = 180, 093 | 89˚ 31’ 91˚ 15’ 268˚ 27’ 271˚ 35’ | 358˚ 51’ 358˚ 07’ 1˚ 40’ 2˚ 55’ | –1˚ 09’ –1˚ 53’ +1˚ 40’ +2˚ 55’ | –0, 40 –1, 48 +0, 67 +2, 45 | 179, 693 178, 613 180, 763 182, 543 | |||
| Станция ПК9+50 i=v H = 179, 418 | 88˚ 05’ 90˚ 34’ 267˚ 40’ 269˚ 20’ | 357˚ 55’ 357˚ 04’ 1˚ 34’ 2˚ 28’ | –2˚ 05’ –2˚ 56’ +1˚ 34’ +2˚ 28’ | –0, 84 –2, 36 +0, 68 +2, 11 | 178, 578 177, 058 180, 098 181, 528 | |||
| Станция ПК10 i=v H = 178, 287 | 89˚ 20’ 90˚ 30’ 270˚ 38’ 271˚ 05’ | 359˚ 10’ 358˚ 35’ 0˚ 58’ 1˚ 44’ | –0˚ 50’ –1˚ 25’ +0˚ 58’ +1˚ 44’ | –0, 36 –1, 21 +0, 34 +1, 39 | 177, 927 177, 077 178, 647 179, 677 |
|
|