Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Створення моделі
|
|
Нестерук Антон
Варіант 17
Лабораторна робота №1
Використання пакету Simulink MATLAB для моделювання ТОУ
Мета роботи: Ознайомитися з пакетом розширення Simulink системи MATLAB, яка ядром інтерактивного програмного комплексу, який призначений для математичного моделювання лінійних і нелінійних динамічних систем і пристроїв, які представлені своєю функціональною блок-схемою, що називається S-моделлю. Для побудови функціональних блок-схем пристроїв, що моделюємо, Simulink має велику бібліотеку блочних компонентів і зручний редактор блок-схем. Використовуючи потрібні набори блоків користувач за допомогою миші може перетягувати потрібні блоки на робочий стіл пакету Simulink і з’єднувати лініями входи і виходи блоків. Таким чином створюється S-модель системи або пристрою.
Створення моделі
Щоб створити нову модель, попередньо треба розробити математичний опис моделі, продумати її постановку і вибрати методи рішення. Правильно зроблена підготовча робота і розуміння теоретичного матеріалу предмету моделювання дозволить успішно розв’язати поставлену задачу.
Спочатку відкриваємо пусте вікно для створення нової моделі за допомогою кнопок Create a new model в панелі інструментів броузера бібліотек Simulink, або командою File®New®Model в меню.
Зверху вікна можна вставити заголовок нової моделі. Для цього досить встановити курсор мишки в потрібне місце і двічі клацнути лівою кнопкою. Появиться прямокутна рамка з маркером. Надписи можна вводити і на кирилиці, проте не завжди шрифти MATLAB її підтримують.
Для створення моделі відкриваємо необхідний розділ бібліотеки, наприклад, Sources, джерела сигналів, і перетягуємо необхідне джерело, наприклад, синусоїдальних сигналів, Sine Wave, на робочий стіл, з розділу бібліотеки Сигнали і Системи, Signals & Systems, перетягуємо індикатор перетину, блок Hit Crossing, а з розділу бібліотеки виведення результатів, Sinks, осцилограф, блок Scope.
Встановлені блоки можна виділити, при цьому по кутах блока з’являються чорні крапки. Виділений блок можна перетягувати мишкою, змінювати його розміри, робити копії при натиснутій кнопці Ctrl, редагувати за допомогою меню редагування Edit. Деякі команди редагування і форматування також можна викликати клацанням правої кнопки мишки на тлі блока. До цих команд відносяться відомі команди з буфером пам’яті: Cut, Copy, Paste, вирізати, копіювати, вставити, команди по відміні і відновленню останньої операції, Undo, Redo, команда по знищенню виділеного об’єкта Clear та ін.
Для обертання блоків, при необхідності використовується команда Rotate block, яка знаходиться в меню форматування, Format. Назви блоків можна змінювати виділивши їх і підібравши необхідні шрифти в меню форматування. З буфера пам’яті копія блока вставляється на робочому столі командою Paste в тому місці, де попередньо було відмічено курсором мишки. Перетягувати можна не тільки один блок, а й групу блоків, попередньо їх виділивши.
Далі можна з’єднати виходи і входи блоків, формуючи модель. Для цього ми вказуємо курсором мишки на вихід джерела і, при натиснутій лівій кнопці мишки, перетягуємо з’єднання до входу наступного блоку. Форму лінії з’єднання, яка закінчується стрілочкою, можна змінювати, захоплюючи лівою кнопкою мишки і перетягуючи її в потрібному напрямку.
Для організації розгалуження на лінії, в потрібній точці ми ставимо курсор і мишкою тягнемо лінію до іншого входу блока. З’єднаємо ті блоки, які витягли на робочий стіл Simulink. Отримаємо модель, рис. 1.. 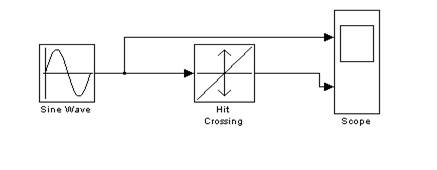
Рис. 1. Приклад моделі
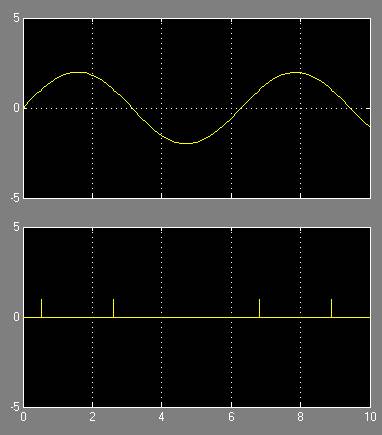
Рис. 2. Результати роботи навчальної моделі
Висновок
Під час цієї лабораторної роботи, я ознайомитися з пакетом розширення Simulink системи MATLAB, яка ядром інтерактивного програмного комплексу, який призначений для математичного моделювання лінійних і нелінійних динамічних систем і пристроїв, які представлені своєю функціональною блок-схемою, що називається S-моделлю. Для побудови функціональних блок-схем пристроїв, що моделюємо, Simulink має велику бібліотеку блочних компонентів і зручний редактор блок-схем. Використовуючи потрібні набори блоків користувач за допомогою миші може перетягувати потрібні блоки на робочий стіл пакету Simulink і з’єднувати лініями входи і виходи блоків. Таким чином створюється S-модель системи або пристрою
|
|