Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Механические интерфейсы платформ КА
|
|
Механические интерфейсы рассмотрим на примере системы разделения КА от РБ.
Система разделения предназначена для жесткого крепления КА к разгонному блоку в процессе вывода на рабочую орбиту и отделения его в заданный момент времени по сигналу системы управления, обеспечивая заданные характеристики отделения (линейные и угловые скорости и т.п.).
В системах разделения используются следующие виды энергии:
-энергия экзотермических химических реакций;
-энергия механических устройств;
-другие виды энергии (потенциальная энергия гидравлических и пневматических устройств, тепловая, магнитная, электромагнитная энергия).
Все большее распространение находят комбинированные системы разделения, использующие несколько видов энергии для выполнения различных функций. Например, в системах разделения может использоваться энергия горения пиротехнических составов и механическая энергия пружинных толкателей.
Выбор оптимальных вариантов систем разделения осуществляется на основании их оценки по таким критериям, как надежность функционирования, масса систем разделения, импульс развиваемой силы, габариты, радиационная и термическая стойкость, нечувствительность к динамическим факторам, величина возмущений, накладываемых на движение КА при разделении, а также экономические, технологические, эксплуатационные и др. показатели.
Наиболее эффективными в настоящее время являются следующие системы разделения:
-пиротехнические системы, состоящие из пороховых аккумуляторов давления, соединенных с замками-толкателями системой трубопроводов;
-автономные пиротехнические замки с пиропатронами и пружинные толкатели, или автономные замки-толкатели;
-автономные детонационные замки, соединенные трансляторами подачи команды, и пружинные толкатели.
Рассмотрим одну из систем, например, систему разделения, состоящую из детонационных замков, объединенных транслятором подачи команд и пружинных толкателей. Данная система по сравнению с пиротехнической системой отделения имеет меньшую массу и габариты, одинаковую надежность, меньшие величины возмущений, накладываемых на КА при разделении. Она также обеспечивает компенсацию продольных и боковых нагрузок при эксплуатации. Система отделения состоит из 8-ми замков-толкателей поз.1, 4-х пороховых аккумуляторов давления (ПАДов) поз.2, соединенных между собой коллектором поз.3 и восьми трубопроводов поз.4, двух контактных датчиков поз.5, фиксирующих факт разделения. Замок-толкатель служит для жесткой стыковки КГЧ к переходному отсеку разгонного блока. ПАД предназначен для получения рабочего газа высокого давления, который по коллектору, в котором происходит выравнивание давления, через трубопроводы поступает в замки-толкатели. Конструктивная схема системы разделения КГЧ от РН представлена на рис.2, конструкция порохового аккумулятора давления на рис.3. Пороховой аккумулятор давления (ПАД) состоит из прочного титанового корпуса поз.1 (см. рисунок), во внутреннюю полость которого, в сепараторе поз.2 установлены пиротехнические патроны поз.3. Пиропатроны поз.5 установлены в пирогнезде поз.4.
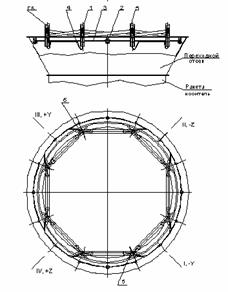
Рисунок 2 - Конструктивная схема системы разделения КГЧ от РН: 1-замок-толкатель; 2- ПАД; 3- коллектор; 4- трубопровод; 5- контактный датчик
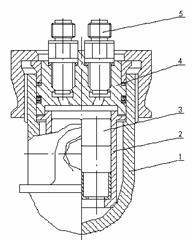
Рисунок 3 - Пороховой аккумулятор давления: 1-корпус; 2-сепаратор; 3-патрон; 4-пиро- гнездо; 5-пиропатрон.
Процесс разделения происходит следующим образом: при поступлении электрического питания на мостики пиропатронов, последние срабатывают и инициируют пиротехнические патроны, которые создают основную массу рабочего газа. Газ через коллектор и трубопроводы поступает на поршни поз. 2 в замках-толкателях (см. рис.4). Поршень под действием газа перемещает шток поз. 3, последний перемещаясь, освобождает шарики поз. 4 и тем самым снимает силовую связь между гильзой поз. 5 и корпусом поз. 1. При дальнейшем движении поршень (на ходе 60 мм) через гильзу поз. 5 сообщает необходимую относительную скорость отделения головному блоку.
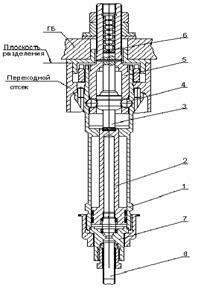
Рисунок 4 - Замок-толкатель: 1-корпус; 2-поршень; 3-шток; 4-шариковый замок; 5-гильза
Детонационный замок. В данной конструкции используется детонационный замок тянущего типа (см. рис.5). Замок состоит из корпуса поз. 1, в котором в кольцевую канавку запрессовано эластичное взрывчатое вещество (ЭВВ) поз. 4, штока с разрывным элементом поз. 2, амортизатора поз. 3, упирающегося в гайку поз. 5. Стык затягивается гайкой поз. 6, между двумя стыковочными шпангоутами расположена специальная рифленая шайба поз. 8. С двух сторон к корпусу подводятся трансляторы детонации поз. 7.

Рисунок 5 - Замок детонации: 1-корпус; 2-шток; 3-амортизатор; 4-ЭВВ; 5-гайка; 6-гайка упорная; 7-трансляторы; 8-шайба рифленая.
Трансляторы детонации служат для передачи детонационного импульса от электродетонаторов к исполнительным элементам разрывных замков. Транслятор (см. рис.6) состоит из детонационного шнура в многослойной металлической оболочке поз.1, двух усилителей поз.4, расположенных в наконечниках поз.З, и служащих для надежной передачи детонации к заряду замка, и накидных гаек поз 2, с помощью которых транслятор соединяется с замками. При срабатывании транслятор детонации не разрушается и продукты детонации локализуются внутри конструкции.
А-А
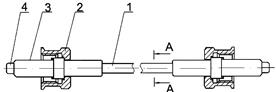
Рисунок 6 - Общий вид транслятора детонации неразрушаемого: 1-шнур ЭВ в оболочке; 2-гайка накидная; 3- наконечник; 4-усилитель.
Узел инициирования с ножом. В данной системе отделения используется узел инициирования, соединенный с ножом для прерывания электрической связи между блоком и космическим аппаратом (см. рис.7). В корпусе поз.1 узла инициирования установлен электродетонатор поз.2 и с двух сторон подведены трансляторы детонации поз.З. Кабель от электродетонатора заведен под хомут поз.4.
Рисунок 7 - Узел инициирования с ножом: 1-корпус; 2-электродетонатор; 3-транслятор; 4-хомут.
Пружинные толкатели (см. рис.8) состоят из корпуса поз.1, в котором расположен шток поз.2 и пружина поз.З. В рабочем состоянии пружина сжата, шток удерживает пружину в таком состоянии, упираясь в кронштейн разгонного блока.
Рисунок 8 - Пружинный толкатель: 1-корпус; 2-шток; 3-пружина; 4-гайка.
Стыковка КА с РБ осуществляется при помощи технологических стыковочных шпилек на ТК. После стыковки шпильки поочередно снимаются и устанавливаются детонационные замки, к которым подстыковываются трансляторы детонации.
Процесс разделения происходит следующим образом: подается электрический сигнал от системы управления на мостики накаливания электродетонаторов. Детонация по трансляторам передается на усилители. Через усилители инициируется ЭВВ в замках, создающее продукты детонации и ударную волну, действующие на шток замка. Происходит разрушение штока по кольцевой канавке, при этом снимается силовая связь между шпангоутом космического аппарата и кронштейнами РБ. Одновременно нож, расположенный в узле инициирования срабатывает и снимает электрическую связь между КА и РБ. После этого вступают в работу пружинные толкатели, которые обеспечивают разделение КА и РБ с заданной относительной скоростью.
Основные характеристики системы:
-относительная скорость отделения, м/с
-угловая скорость относительно осей КА, не более, град/с
-максимальное осевое усилие, воспринимаемое разрывным замком, Н
-максимальная сила толкателя, Н
-рабочий ход толкателя, мм
-сопротивление мостика накаливания, Ом
-минимальный ток срабатывания на один мостик накаливания, А
-скорость детонации, не менее, м/с
-масса системы, кг
Особенности конструирования модульных отсеков различного целевого назначения. Тенденции совершенствования конструктивно-технологических решений существующих и перспективных многоцелевых космических платформ для данных типов КА.
Большинство современных КА мониторинга, обеспечения связи и навигации создаются с использованием ряда унифицированных космических платформ (УКП) в основном с бортовыми служебными системами и агрегатами.
При разработке модификаций УКП для КА различного назначения за основу, например, может быть взят принцип создания универсального функционального модуля, объединяющего в своем составе систему электропитания с информационно-управляющей аппаратурой, который в зависимости от конкретной целевой задачи, решаемой КА, дооснащается двигательным модулем и системой стабилизации с необходимыми характеристиками.
УКП для КА должны удовлетворять широкому спектру требований со стороны потенциальных заказчиков, используя достаточно простые и недорогие технические решения.
Особенности конструирования модульных отсеков различного целевого назначения космических платформ рассмотрим на примерах.
Пример 1.
УМКП-800 (унифицированная малогабаритная космическая платформа) предоставляет комплекс услуг по созданию КА c массой до 850 кг природоресурсного и гидрометеорологического назначения. Состав УМКП – 800 приведен на рис. 9. Основные технические характеристики УМКП-800 приведены в табл.1.
Рисунок 9 - Состав УМКП-800: 1-бортовой многофункциональный компьютер, 2 - система ориентации и стабилизации, 3 - система электроснабжения, 4 - аппаратура спутниковой навигации, 5 - звездный координатор, 6 - блок распределения питания, 7 - командно - измерительная система, 8 - система ориентации солнечных батарей, 9 - панели конструкции корпуса, 10 - антенно - фидерные устройства, 11- зона полезной нагрузки.
Таблица 1 - Основные технические характеристики УМКП-800
| Параметр | Значение |
| Типы орбит | Круговая ССО |
| Высота орбиты | 650 …850 |
| Средства выведение КА на орбиту | РН " Стрела", РН " Рокот" с РБ " Бриз-КМ", РН " Космос-3М" |
| Коррекция орбиты | По высоте, наклонению |
| Ориентация | Относительно двух осей на Землю и по курсу КА |
| Программные повороты | Вокруг любой оси КА |
| Точность ориентации | не хуже 0, 1° |
| Точность стабилизации | не хуже 5x10-4 °/сек |
| Точность определения положения ЦМ КА на орбите | не хуже 30 м |
| Точность определения положения осей КА в звездной системе координат | не хуже 6" угл.сек. |
| Среднесуточное энергопотребление полезной нагрузки | до 650 Вт |
| Сеансное энергопотребление полезной нагрузки | до 2000 Вт |
| Собственное среднесуточное энергопотребление служебной платформы | не более 150 Вт |
| Устанавливаемая масса полезной нагрузки | 300…450 кг (в зависимости от высоты орбиты) |
| Собственная масса служебной платформы | 430 кг |
| Управление | Однопунктное |
| Срок активного существования | не менее 7 лет |
Пример 2.
УКП «Виктория». Успешная реализация КА связи серии «Ямал» и КА «БелКА» на базе УКП «Виктория» и выполненные проработки по использованию базовой платформы с некоторыми трансформациями при создании КА «БелКА» подтвердили эффективность модульного построения УКП (рис.10 -13).
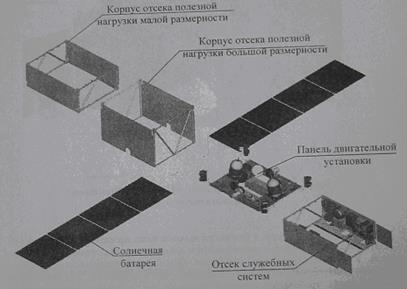
Рисунок 10 - Модульный принцип построения УКП «Виктория»
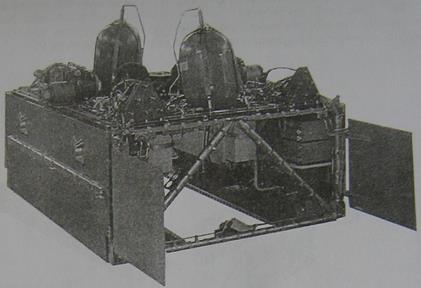
Рисунок 11 – Отсек служебных систем УКП «Виктория» с панелью ДУ

Рисунок 12 – Трансформация УКП «Виктория» для КА «БелКА»
Рисунок 13 – КА «БелКА» на базе УКП «Виктория»
Пример 3.
УКП «Яхта». Модульный принцип построения УКП «Яхта» приведен на рис.14, общий вид на рис. 15.
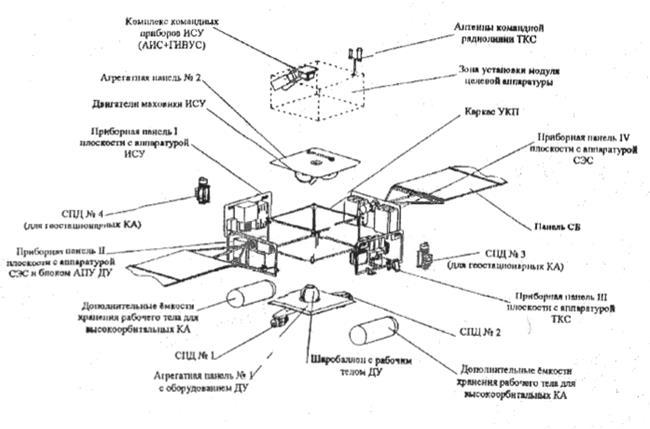
Рисунок 14 - Модульный принцип построения УКП «Яхта»
Рисунок 15 - Общий вид УКП «Виктория»
Основные технические характеристики УКП «Яхта»
Пример 4.
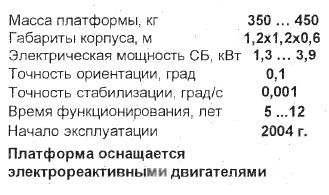
УКП «Нева». Каркас УКП представляет собой сварную конструкцию в виде куба с длиной ребра 700 мм. На боковые грани каркаса устанавливаются модули с аппаратурой, двигательная установка и узлы крепления к РН. Общий вид, модульный принцип построения УКП «Нева» приведен на рис.16, 17. На рис.18 приведена УКП «Нева» в орбитальном полете. Основные технические характеристики УКП «Колибри», «Нева» и «Вулкан» приведены в табл. 2.
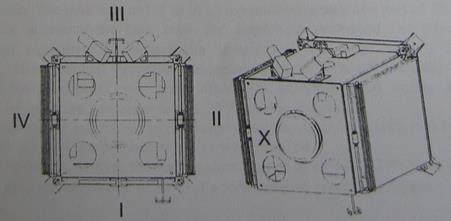
Рисунок 16 - Общий вид УКП «Нева»
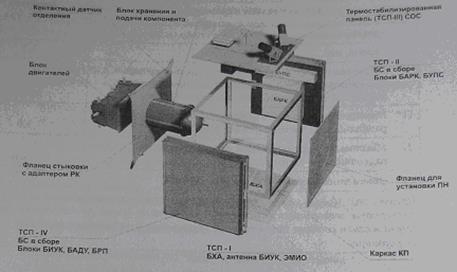
Рисунок 17 - Модульный принцип построения УКП «Нева»
Рисунок 18 - УКП «Нева» в орбитальном полете
Таблица 2 - Основные технические характеристики УКП «Колибри», «Нева» и «Вулкан»
| № п/п | Характеристика | Платформа | ||
| «Колибри» | «Нева» | «Вулкан» | ||
| Масса платформы, кг | более 90 | |||
| Масса модуля целевой аппаратуры, кг | 50…100 | - | ||
| Средневитковое энергопотребление ПН, Вт | - | до 180 | до 160 | |
| Максимальное энергопотребление, Вт | ||||
| Напряжение питания на выходе СЭП, В | - | 28, 5+/-0, 5 | 31+/-1 | |
| Точность ориентации, град | 0, 1 | 0, 05 | 0, 17 | |
| Точность стабилизации, град./с | - | 0, 001 | 0, 001 | |
| Продолжительность автономного функционирования, сут | - | |||
| Скорость пердачи информации, кбит/с |
Пример 5. УКП разработки SSTL (Великобритания). Модельный ряд УКП, модульный принцип и компоновочная схема УКП «Минисат», общий вид УКП «Минисат» разработки SSTL приведены на рис. 19-21. Основные технические характеристики УКП разработки SSTL приведены в табл. 3.

Рисунок 19 - Модельный ряд УКП разработки SSTL
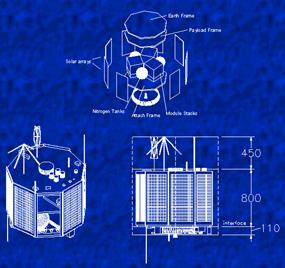
Рисунок 20 - Модульный принцип (вверху) и компоновочная схема (внизу) УКП «Минисат» разработки SSTL
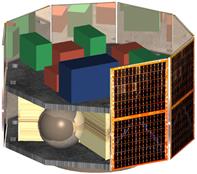

Рисунок 21 - Общий вид УКП «Минисат» разработки SSTL
Таблица 3 – Основные технические характеристики унифицированных космических платформ разработки SSTL
| № | Характеристики | MicroSat-70 | Modular Microsatellite | Enhanced Microsatellite | Constella | MiniSat-400 |
| Габариты, мм | 690х360х360 | 690х360х360 | 600х600х500(700) | 1000х1000х600 | 1100х1100х885 | |
| Масса платформы(ПН), кг | 44, 7 (23, 8) | 44, 7 (23, 8) | полн. 90…140 | полн. 70…140 | 400 (200) | |
| СЭП -тип СБ/ мощность, Вт - тип АБ/ емкость А*ч - мощность макс., Вт | GaAs / 4х35 NiCd / 7 | GaAs / 4х35 NiCd / 7 | GaAs / 4х80 NiCd / 7 | Si /70илиGaAs/ 100 NiCd / 7 100 (Si), 140 (GaAs) | GaAs / 9х60 NiCd / 21 250 (175 СБ) | |
| СОиС - тип - точность ориент., град - точность стаб., угл. с/с - датчики - исполнительные органы | 3-х осная +/- 0, 5 - СД, ММ(2), ДМ(3), МД(2) | 3-х осная +/- 5 - СД, ММ(2), ГШ, МД(2) | 3-х осная +/- 0, 1 СД(2), ММ(2), ЗК(2), ДУС (2) ДМ(4), МД(13) | 3-х осная +/- 0, 2 ДГ(3), ММ(2), ЗК, ДУС или СД ГР(2), МД(6) | 3-х осная +/- 0, 1 СД(4), ПМВ(1), ММ(2), ЗК(2), ДУС(4) ДМ(4), МД(13) | |
| Радиолиния - НС-КА диап./ I, кбод - КА-НС диап./ I, Мбод | S / 16/128 S / 2 | VHF/ 9 UHF /9/38 кбод | VHF/9илиS/16/128 UHF/9/38кбод S/2 | S / 16/64 S / 0, 016…2 | S / 16/128 S / 2 | |
| Двигательная установка - топливо - хар. скорость, м/с - масса топлива | нет | нет | нет | нет | газ 5, 3 |
Пример 6.
УКП Mk-1 и Mk-3 французской космической системы изучения природных ресурсов Земли SPOT. Состав унифицированной платформы Mk-1, модульный принцип построения (два основных модуля: двигательный и бортовых обслуживающих систем) и основные структурные элементы УКП Mk-3 приведены на рис. 22 -24. Летный экземпляр платформы Mk-3 на тепловакуумных испытаниях приведен на рис.25. Основные технические характеристики УКП Mk-1 приведены в табл.4.
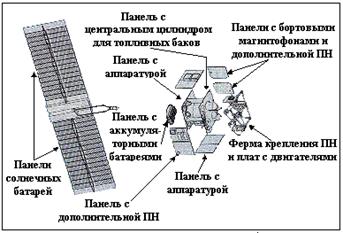
Рисунок 22 - Состав унифицированной платформы Mk-1
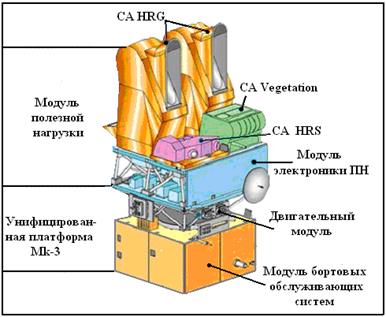
Рисунок 23 - Модульный принцип построения Mk-3
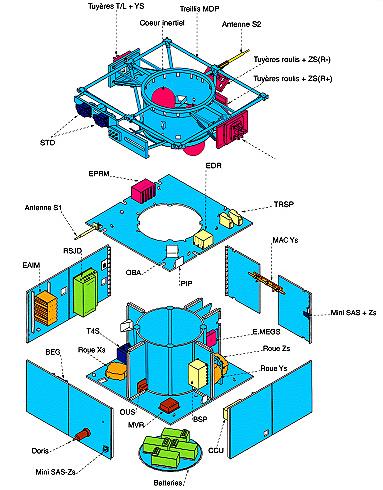
Рисунок 24 – Основные структурные элементы УКП Mk-3: синим цветом отмечены - элементы конструкции; зелёным - элементы системы электропитания; красный - агрегаты двигательной установки; желтым, оранжевым и фиолетовым - блоки бортового комплекса управления.
Рисунок 25 - Летный экземпляр платформы Mk-3 на тепловакуумных испытаниях
Таблица 4 - Основные технические характеристики унифицированной платформы Mk-1
| № п/п | Наименование характеристики | Значение |
| Система управления движением: -тип стабилизации -точность стабилизации по: -тангажу и крену, град -рысканию, град | трёхосная 0, 11 0, 21 | |
| Бортовая вычислительная система: -длина слова (максимальная), бит -емкость ПЗУ ПН, Кб | ||
| Аппаратура передачи данных: - командно-измерительная и телеметрическая система -диапазон работы -пропускная способность, бод: -телеметрических данных -командной информации -рабочая частота передачи целевой информации, ГГц | S 8, 253 | |
| Система электропитания: - тип ФЭП - конструкция панелей СБ - тип АБ | Si Гибкие секции НКГ |
Тема 17. Особенности экспериментальной отработки и обеспечения надежности КА мониторинга, связи и навигации. Определение состава экспериментальных КА, их назначение и комплектация. Анализ возникновения аварийных ситуаций и определение путей выхода из аварийных ситуаций
Лекция 32.
|
|