Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Жесткость механических характеристик. Устойчивость и установившийся режим работ электропривода
|
|
Для представления связи механических координат (скорости и момента) в аналитической или графической форме вводится понятие механической характеристики, которая существует как для рабочего органа, так и для двигателя и представляет собой зависимость между моментом и скоростью. Формально она подставляется в виде зависимости M = f (ω) для двигателя и M с= F (ω) для рабочего органа. Механические характеристики могут быть представлены и обратными зависимостями. Причем, для рабочего органа чаще всего независимой переменной является скорость, поэтому здесь целесообразно представлять характеристику в виде зависимости момента от скорости, а для двигателя лучше использовать обратные зависимости ω = f 1(M), так как здесь чаще независимой переменной является момент. Хотя в зависимости от решаемых задач используется и та и другая форма записи.
В электроприводе в первую очередь вызывает интерес точка установившегося режима, т.е. значение скорости ω с, при которой выполняется равенство M = M с. Значение момента и скорости в установившемся режиме легко определить графически точкой пересечения механических характеристик двигателя и рабочего органа, если за отрицательное направление M с взять положительное направление M. Например, на рис. 1.2 кривая 1 представляет собой зависимость ω = F (M с), кривая 3 – зависимость ω = F (– M с), а кривая 2 – зависимость ω = f (M). Установившийся режим определяется точкой пересечения кривых 2 и 3. В дальнейшем при изображении механических характеристик рабочего органа на одной плоскости с механическими характеристиками двигателя мы всегда будем брать M с с обратным знаком.
Для оценки формы механических характеристик вводится понятие их жесткости. Жесткость механической характеристики определяется соотношением
β =∂ M /∂ ω.
Если механическая характеристика двигателя или рабочего органа линейна, то ее жесткость во всей области существования постоянна. Для нелинейной характеристики в каждой точке жесткость различна.

Рис. 1.2. К определению установившегося режима
Жесткость может быть положительной (кривая 3, рис. 1.2.) и отрицательной (кривая 2, рис. 1.2). Существует понятие абсолютно жесткой β =∞ и абсолютно мягкой β =0 характеристик. Первая параллельна оси абсцисс, а вторая – оси ординат.
Примечание: Любую линейную взаимосвязь принято обозначать строчной буквой f, а нелинейную – заглавной – F.
Установившийся режим характеризуется состоянием равновесия системы двигатель – нагрузка относительно координаты ω. Как и всякое состояние равновесия, установившийся режим может быть устойчивым и неустойчивым. Известно, что критерием статической устойчивости системы является условие возникновения усилия, стремящегося при выведении системы из состояния равновесия вернуть ее в это состояние. Чтобы сформулировать условие статической устойчивости электропривода рассмотрим электромеханическую систему, состоящую из двигателя и рабочей машины, механические характеристики которых представлены на рис. 1.4.а. При этом характеристика двигателя 1 имеет отрицательную жесткость (β < 0), а характеристика рабочего органа (рабочей машины) абсолютно мягкая β с=0.

Рис. 1.4. К определению статической устойчивости
В точке установившегося режима 1 привод имеет следующие координаты:
M = M с, ω =ω с
Если внешним принудительным воздействием переместить рабочую точку привода из равновесного положения 1 в положение 2, мы получим отклонение скорости и момента:
Δ ω =ω 2− ω с, Δ M = M 2− M с
где ω 2, M 2 – соответственно скорость и момент в новой рабочей точке привода. Согласно рис. 1.4.а имеем Δ ω > 0, Δ M < 0, т.е. в новой рабочей точке скорость возросла, а момент уменьшился. Если теперь внешнее воздействие убрать, то под действием отрицательного динамического момента Δ M < 0, как показано в предыдущем параграфе, привод получит отрицательное ускорение, т.е. будет замедлять скорость и рабочая точка переместится из 2 в 1. Таким образом, после снятия внешнего воздействия привод возвратится в состояние равновесия. Тоже можно показать, если принудительно перемесить рабочую точку в положение 3.
Теперь предположим, что в той же системе двигатель имеет характеристику 2 с положительной жесткостью (β > 0), рис. 1.4.б. Нетрудно показать, что в этом случае при принудительном перемещении рабочей точки из равновесного положения 1 в положение 2, привод не может вернуться в точку равновесия 1 (после снятия воздействия), так как динамический момент, возникший в результате выведения системы из равновесия (Δ M > 0), будет ускорять привод, т.е. способствовать дальнейшему увеличению скорости. Можно отметить, что в первом случае приращение момента и приращение скорости имели противоположный знак, а во втором – одинаковый.
Из этих двух примеров можно заключить, что необходимым и достаточным условием обеспечения устойчивости установившихся режимов является противоположность знаков приращения скорости и приращения момента, возникающих в результате принудительного выведения системы из состояния равновесия. Формально это условие запишется выражением
β − β с< 0
Если момент сопротивления рабочего органа не зависит от скорости (β с=0), то статическая устойчивость полностью определяется видом механической характеристики двигателя и условие устойчивости записывается выражением
β < 0
Если механические характеристики двигателя и рабочего органа линейны, устойчивость установившегося режима достаточно проверить по выражению (1.20) в одной точке. В противном случае, например, в приводах с асинхронными двигателями устойчивость необходимо проверять во всей области существования характеристик.
4. Двигатель постоянного тока (типы). Двигатель постоянного тока с независимым возбуждением. Уравнение электромеханической и механической характеристик. Искуственные хаарктеристики
Как уже говорилось ранее в моей предыдущей статье, двигатели постоянного тока применяются в различных промышленных, транспортных и подобных системах, в которых необходимо осуществлять плавное регулирование скорости вращения и выдерживать постоянство момента (прокатные станы, лифты, в трамваях и троллейбусах, металлорежущие станки).

Рисунок 1 - Схема ДПТ НВ
Частота вращения двигателя постоянного тока с независимым возбуждением выражается формулой:

Это выражение является электромеханической характеристикой ДПТ, в которой: U – питающее напряжение сети; Iя – ток протекающий в якорной обмотке; Rя – сопротивление якорной цепи; k – конструктивный коэффициент двигателя; Ф – магнитный поток двигателя.
Момента на валу двигателя:
Исходя их этого, мы можем заметить, что если подставить формулу момента в выражение частоты вращения, то мы получим электромеханической характеристику, выраженную через момент:
Данное уравнение механической характеристики является определяющим зависимость скорости вращения двигателя к моменту на его валу, так как если рассматривать момент в статике, то он будет равен моменту сопротивления Мс. Это уравнение определяет зависимость скорости вращения двигателя от момента сопротивления Мс.
При прямом пуске двигателя, пусковой ток значительно больше номинального Iп> > Iн, и поэтому якорная обмотка начинает сильно греется и может выйти из строя, кроме того, большие пусковые токи крайне негативно влияют на щеточно-коллекторный узел. По этому, пусковые токи обычно ограничивают введением добавочного сопротивления в якорную цепь двигателя. Величина максимального превышения пускового тока от номинального может достигать от 2 до 5 раз Iп=(2-5)*Iн, в зависимости от конструкции и типа ДПТ. Такой пуск называется – реостатный пуск двигателя, который вы можете видеть на рисунке 2.

Рисунок 2 – Реостатный пуск ДПТ.
Как вы могли заметить, что пуск происходит в несколько ступеней – это необходимо для более плавного пуска. Наклон механической характиристики зависит от величины добавочного сопротивления, и чем оно больше тем и наклон от основной больше, то есть характеристика становится более жесткой. На рисунке 3 представлены зависимости механических характеристик от добавочного сопротивления.
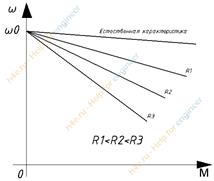
Рисунок 3 – Зависимость наклона мех. Характеристики ДПТ от добавочного сопротивления.
Так же регулирование частоты вращения двигателя может осуществляться понижением питающего напряжения, характеристика представлена на рисунке 4.
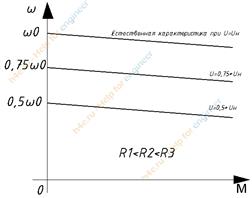
Рисунок 4 – Зависимость частоты вращения ДПТ от питающего напряжения.
Отличительной особенностью двигателей постоянного тока от АД, это возможность регулирования скорости вверх от основной, изменением магнитного потока. Однако экономически выгодно регулировать частоту вращения когда ток якоря является номинальным, но при этим значения моментов будут различными для разных величин магнитного потока Ф. Такие точки значения номинальных моментов будут располагаться на пунктирной гиперболической кривой на рисунке 6.

Рисунок 5 – Регулирование скорости вращения ДПТ НВ изменением магнитного потока
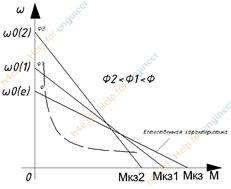
Рисунок 6 – Механическая характеристика регулирования частоты вращения изменением магнитного потока с сохранением оптимальных номинальных параметров
Генераторный режим ДПТ НВ
Генераторный режим ДПТ НВ можно разделить на следующие режимы:
– рекуперативное торможение (с отдачей энергии в сеть);
– динамическое торможение;
– торможение противовключением.
Обычно двигатель с независимым возбуждением работает при Ф=const. После преобразований математическое описание процессов в ДНВ можно представить в виде следующего ур-я механической характеристики.  .
.
Подставив сюда значение  , получим уравнение электромеханической характеристики.
, получим уравнение электромеханической характеристики.  .
.
В установившимся режиме  .
.
Поэтому уравнение статических характеристик имеют вид:


При Uя=const и ф=const они представляют прямые, отсекающие на оси ординат величину  , соответствующую скорости идеального холостого хода.
, соответствующую скорости идеального холостого хода.
Характеристика двигателя, соответствующие отсутствию в якорной цепи добавочного сопротивления при Uя =const и ф=const, являются естественными. Наклон их определяется только величинами  .
.
|
 Модуль статической жесткости механической характеристики можно найти из уравнения момента, взяв производную по скорости
Модуль статической жесткости механической характеристики можно найти из уравнения момента, взяв производную по скорости

Используя понятие жесткости, уравнения статических механической и электромеханической характеристик можно представить в следующих видах:
 ;
; 
 ;
; 
Чем выше модуль b статической естественной характеристики, тем стабильней wпри широких пределах изменения нагрузки. Другой оценкой стабильности рабочей w является статизм механической характеристики, количественной оценкой которой является номинальный перепад скорости.  .
.
Относительный перепад скорости на естественной характеристике:
Для двигателей средней и большой мощности составляет (1, 5¸ 3)%.
Выше написанные уравнения достаточно точно описывают статические характеристики ДНВ, имеющих компенсационную обмотку (КО).Двигатели малой мощности и значительная часть двигателей средней мощности (< 100кВт.) такой обмотки не имеют. Поэтому приведенные выше уравнения описывают естественные характеристики лишь приближенно.

| 
|
На вид естественных механической и электромеханический характеристик значительное влияние оказывает реакция якоря, т. к. даже при наличии КО она полностью компенсируется только при номинальной нагрузке. Вследствие реакции якоря при росте нагрузки (тока) поток машины уменьшается и наоборот. В результате с ростом нагрузки (тока) момент двигателя растет не пропорционально току, а в меньшей степени, что вызывает отклонение характеристик от линейных (см. пунктирные характеристики на рис.).
В механических характеристиках из – за размагничивающего действия реакции якоря могут появляться участки с положительной жесткостью (см. “а-б” на графике). Сказывается явление опрокидывания регулирования. Это может привести к неустойчивой работе электропривода.
Реакция якоря, кроме того, уменьшает перегрузочную способность двигателя. Так, при токе, допустимому по условиям коммутации, поток двигателя снижается на10-20%, пропорциональность между Iя и М нарушается и перегрузочная способность двигателя без КО при прочих равных условиях ниже, чем у двигателей с КО. Реакция якоря неблагоприятно сказывается и на динамических свойствах эл. привода. Поэтому в двигателях без КО мощностью до 100кВт применяются стабилизирующие обмотки, размещаемые на сердечниках главных полюсов. Они включаются цепь якоря последовательно и создают небольшую МДС, компенсирующую действие реакции якоря. Но двигатели с такими обмотками нельзя применять для реверсивных эл. приводов, т. к. при изменении направления вращения ток якоря имеет противоположное направление и стабилизирующая обмотка будет усугублять действие реакции якоря, ибо ее МДС будет действовать против МДС основных полюсов.
 Механические характеристики ДНВ имеет вид прямой, проходящей через II, I и IV, квадранты лишь тогда, когда они представляют зависимость w от электромагнитного момента. Если же изобразить зависимость w от момента на валу Мв, то это будет ломаная линия. При работе машины в двигательном режиме
Механические характеристики ДНВ имеет вид прямой, проходящей через II, I и IV, квадранты лишь тогда, когда они представляют зависимость w от электромагнитного момента. Если же изобразить зависимость w от момента на валу Мв, то это будет ломаная линия. При работе машины в двигательном режиме  , а в тормозном (генераторном)
, а в тормозном (генераторном)  . Если вычертить характеристику
. Если вычертить характеристику  , а затем прибавить или вычесть DМ при w=0, получим зависимость
, а затем прибавить или вычесть DМ при w=0, получим зависимость  - ломаная 2. При w=0 возникает скачок на величину 2DМ и скорость реального холостого хода w0р ставится меньше скорости w0 идеального холостого хода.
- ломаная 2. При w=0 возникает скачок на величину 2DМ и скорость реального холостого хода w0р ставится меньше скорости w0 идеального холостого хода.
Часто для удобства расчетов и сравнения характеристик двигателей различной мощности уравнение механической характеристики представляют в относительных единицах. Применение их делает ненужным переход от одних единиц измерений к другим, проще сравнивать варианты расчетов, выполненных для двигателей, отличающихся по своим номинальным данным. Характеристики двигателей, различных по своим номинальным данным, становятся универсальными. За базовые величины принимаются номинальные значения Uн, Iн, Фн, Ен, Мн и т. д. За базовую единицу скорости ДНВ, АД и СД – принимается скорость w0, а для двигателей последовательного возбуждения - wн. За базовую единицу сопротивления принимается сопротивление якорной цепи, которое при неподвижном якоре и Uн ограничивает ток в якоре до Iян. Его называют номинальным сопротивлением. Схематично это можно представить так.
 Численно оно равно
Численно оно равно  . Напряжения, ЭДС, токи и т. д. в относительных единицах представляются следующим образом:
. Напряжения, ЭДС, токи и т. д. в относительных единицах представляются следующим образом:  (для двигателей последовательного и смешанного возбуждения
(для двигателей последовательного и смешанного возбуждения  ):
):  . Для получения уравнения механической характеристики ДНВ в относительных единицах разделим обе части уравнения на w0 и сделаем преобразования.
. Для получения уравнения механической характеристики ДНВ в относительных единицах разделим обе части уравнения на w0 и сделаем преобразования. 
 . Т. к. у ДНВ при Ф=const Мº Iя, то
. Т. к. у ДНВ при Ф=const Мº Iя, то  и
и  .
.
При изменении параметров двигателя, сети, или при использовании специальных схем включения характеристики двигателя будут искусственными. Так, при изменении сопротивления в якорной цепи уменьшается жесткость характеристик  . Семейство механических характеристик, соответствующих различным значениям Rдоб, изображено на следующем рис., причем Rд3> Rд2> Rд1. В частном случае при U=0 когда якорь замкнут на некоторое сопротивление, все характеристики пересекаются в начале координат (см. рис.). Из графиков
. Семейство механических характеристик, соответствующих различным значениям Rдоб, изображено на следующем рис., причем Rд3> Rд2> Rд1. В частном случае при U=0 когда якорь замкнут на некоторое сопротивление, все характеристики пересекаются в начале координат (см. рис.). Из графиков

|
видно, что увеличение сопротивления якорной цепи вызывает уменьшение скорости двигателя. Это объясняется тем, что при этом увеличивается падение напряжения на якоре и при каждом
|
данном моменте сопротивления уменьшается ток, а следовательно и момент двигателя.
При изменении напряжения, подводимого к якорю двигателя, изменяется w0. Жесткость характеристик остается неизменной. Семейство механических характеристик, соответствующих различным напряжениям на зажимах двигателя изображено на рис. Отсюда видна возможность регулирования скорости двигателя изменением подводимого напряжения. Но для этого необходимо питать двигатель от источника регулируемого напряжения
Для обеспечения оптимальных условий работы некоторых производственных механизмов в соответствие с требованиями технологического процесса иногда возникает необходимость повышения рабочей скорости сверх основной. При U=const этого можно достичь путем ослабления магнитного потока двигателя. Его ослабление вызывает увеличение w0, т. к.  , но одновременно уменьшается жесткость характеристик
, но одновременно уменьшается жесткость характеристик  . В результате меньшей жесткости характеристик будет иметь место и большее падение скорости при одном и том же значении Мс.
. В результате меньшей жесткости характеристик будет иметь место и большее падение скорости при одном и том же значении Мс.
Если новое, уменьшенное значение потока, равно  , где a< 1, то новое увеличенное значение скорости идеального холостого хода
, где a< 1, то новое увеличенное значение скорости идеального холостого хода  .
.
При прежнем значении нагрузки, значит момента двигателя изменяется, ток якоря (возрастает), что видно из уравнения момента  .
.
 т. к. уменьшается ЭДС.
т. к. уменьшается ЭДС.
Уравнение механической характеристики двигателя при ослабленном потоке имеет вид
 .
.
Для рассмотрения особенностей механических характеристик при ослабленном Ф, рассмотрим уравнение электромеханической характеристики и выражение для тока якоря.
 ;
;  .
.
| 
|
Из него следует, что при пуске двигателя в ход, т. е. при w=0, ток якоря не зависит от Ф, а определяется лишь величиной Uи RЯ:  .
.
Следовательно, характеристики  для всех значений Ф пересекаются в одной точке на оси абсцисс и имеют вид, изображенный на рис. Соответствующие механические характеристики для этих значений Ф приведены рядом.
для всех значений Ф пересекаются в одной точке на оси абсцисс и имеют вид, изображенный на рис. Соответствующие механические характеристики для этих значений Ф приведены рядом.
Видно, что точки пересечения характеристик не совпадают. При этом при нагрузках, соответствующих значениям слева от точек пересечения, скорость двигателя возрастает, а при нагрузках соответствующих значениям справа от точек пересечения – скорость уменьшается. Это явление, как известно, называется, опрокидыванием регулирования. Причиной является то, что при неизменном Мс ослабление Ф влияет на скорость в 2-х направлениях одновременно. С одной стороны оно вызывает увеличение скорости, с другой обуславливает снижение вследствие увеличения падения напряжения из-за роста тока (последний растет из-за уменьшения ЭДС). В точках пересечения характеристик оба этих фактора уравновешивают друг друга и несмотря на ослабление потока скорость не изменяется. Обычно при нормальных нагрузках точки пересечения характеристик находятся в зоне больших токов (нагрузок), недопустимых по условиям коммутации. Однако, при значительном сопротивлении в цепи якоря или при сильно пониженном напряжении это явление может иметь место.
5.Виды тормозных режимов двигателя постоянного тока (на осях, +, -, применение)
Электрические двигатели используются не только для приведения во вращение механизмов, но и для их торможения. Торможение необходимо, если нужно быстро остановить механизм или уменьшить его частоту вращения. Применение механических тормозов для этого затруднительно из-за нестабильности их характеристик, малого быстродействия и трудностей автоматизации.
Различаются три вида тормозных режимов двигателей постоянного тока:
1) генераторное торможение с отдачей электрической энергии в сеть (рекуперативное торможение);
2) генераторное торможение с гашением выработанной энергии в реостате, подключенном к обмотке якоря (реостатное, или динамическое, торможение);
3) электромагнитное торможение (торможение противовключе-нием).
Во всех трех режимах электромагнитный момент М воздействует на якорь в направлении, противоположном п, т. е. является тормозным. Рассмотрим более подробно эти режимы.
Рекуперативное торможение. Двигатель с параллельным возбуждением переходит в режим рекуперативного торможения, если его частота вращения превышает по=и/(сеф). Тогда ЭДС машины становится больше напряжения сети и ток меняет направление:
(7.84)
т. е. двигатель переходит в генераторный режим, создает тормозной момент, а выработанная электрическая энергия отдается в сеть и может быть использована.
Переход машины с параллельным возбуждением из двигательного режима в генераторный может происходить автоматически, если под действием внешнего момента якорь вращается с частотой, большей частоты вращения холостого хода: п~> п0. Можно перевести машину в генераторный режим и принудительно, уменьшив частоту вращения п0 за счет увеличения магнитного потока (тока возбуждения) или снижения напряжения, подводимого к двигателю. Механические характеристики в генераторном режиме являются продолжением механических характеристик двигательного режима в область отрицательных моментов (рис. 7.23).

Двигатели с последовательным возбуждением не могут автоматически переходить в режим рекуперативного торможения. Если необходимо иметь рекуперативное торможение, схему двигателей в тормозном режиме изменяют, превращая двигатели в генераторы с независимым возбуждением. Двигатели со смешанным возбуждением могут автоматически переходить в генераторный режим, что обусловило их применение в троллейбусах и трамваях, где часты остановки, а двигатель должен обладать мягкой механической характеристикой.
Рис. 7.23. Механические характеристики двигателя с параллельным возбуждением в двигательном и генераторном режимах

Рис. 7.24. Схема включения двигателя с параллельным возбуждением в режиме динамического торможения (а), скоростные и механические характеристики при торможении (б)
Динамическое торможение. При динамическом (реостатном) торможении двигателя с параллельным возбуждением обмотка якоря отключается от сети и к ней присоединяется реостат /? д(рис. 7.24, о). При этом машина работает в генераторном режиме и создает тормозной момент. Однако выработанная электрическая энергия гасится в реостате. Ток якоря при торможении
прямо пропорционален частоте вращения п, вследствие чего скоростные характеристики I=f(n) —прямые, проходящие через начало координат (рис. 7.24, б).
Тангенс угла наклона характеристик у в масштабе равен сопротивлению в цепи якоря:
В процессе торможения по мере уменьшения скорости постепенно уменьшают Ял, плавно или ступенями, чтобы поддержать средний ток якоря, а следовательно, и тормозной момент на заданном уровне. При очень больших частотах вращения в режиме торможе-



нчя приходится уменьшать ток возбуждения, чтобы ЭДС машины Е не превзошла допустимого значения
Механические характеристики в тормозном режиме при постоянном магнитном потоке имеют тот же вид, что и скоростные характеристики, только масштаб по оси абсцисс меняется в соответствии с формулой М — счФ1а (рис 7 24, б)
При ослабленном поле (при уменьшенном токе возбуждения) характеристики остаются линейными, но увеличивается угол их наклона При л «О тормозной
момент равен нулю Следовательно, для того чтобы якорь был заторможен в неподвижном состоянии, реостатное торможение должно быть дополнено другим, например механическим
Двигатель с последовательным возбуждением может работать в режиме динамического торможения, но при переводе его в этот режим нужно переключить провода, подводящие ток к обмотке возбуждения (рис 7 25) Это необходимо для того, чтобы при изменении направления тока в якоре при переходе из двигательного режима в генераторный направление тока в обмотке возбуждения оставалось неизменным (от б к а, рис 7 25) и создаваемая этой обмоткой МДС F в совпадала по направлению с МДС FOCT от остаточного магнетизма В противном случае генераторы с самовозбуждением размагничиваются
Построение тормозных характеристик поясняется рис 7 26, а. Если в цепь машины включено добавочное сопротивление /? д, то установившийся режим работы соответствует точке пересечения
Рис 7 25 Изменение схемы при переводе двигателя последовательного возбуждения (а) в режим динамического торможения (б)
Рис 7 26 Характеристики n=f(la) при реостатном торможении двигателя последовательного возбуждения и их построение
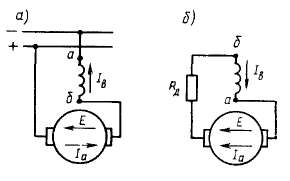
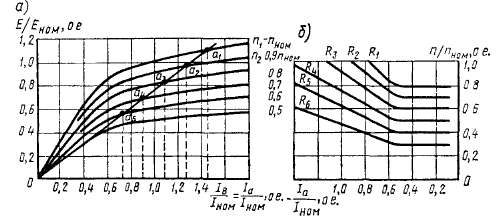
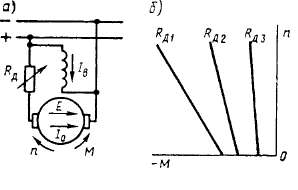
Рис. 7.27. Схема включения двигателя с параллельным возбуждением в режиме электромагнитного торможения и его механические характеристики
вольт-амперной характеристики сопротивления (2# + /? д) с характеристикой E—f(IB), которая близка к характеристике холостого хода. При Пх это точка аь при п2 — точка а2 и т. д. При некоторой критической скорости, когда вольт-амперная характеристика сопротивления совпадает с начальным прямолинейным участком характеристики E=f(la), машина размагничивается и ток становится близким к нулю. По координатам точек а\, а2 и т. д. можно построить зависимость n—f(Ia); эти скоростные характеристики являются нелинейными (рис. 7.26, б).
Механические характеристики строятся на основании скоростных характеристик и моментной — М= =/(/о), они также нелинейны.
Электромагнитное торможение. В этом режиме изменяют направление электромагнитного момента М, сохраняя неизменным направление вращения, т. е. момент делают тормозным. Последнее осуществляют так же, как и при изменении
направления вращения двигателя, путем переключения проводов, подводящих ток к обмотке якоря (рис. 7.27, а) или к обмотке возбуждения. Чтобы ограничить ток в этом режиме, в цепь обмотки якоря вводят добавочное сопротивление /? д. Регулирование тока Ia=(U+E)/(I, R+RA), т. е. тормозного момента М, осуществляют изменением Ra (рис. 7.27, б) или ЭДС (тока возбуждения /„).
С энергетической точки зрения рассматриваемый способ торможения невыгоден, так как машина потребляет как механическую, так и электрическую энергию, которые гасятся в обмотке якоря и включенном в ее цепь реостате. Но при этом способе можно получать большие тормозные моменты при низких частотах вращения и даже при п = 0, поскольку в этом случае ток Ia= U/ (2/? + /? д).
6. Асинхронная двигатель. Схема включения, схема ззамещения, Электромеханические и механические характеристики АД
Самым распространенным двигателем в промышленности является асинхронный двигатель. На рис.2.10 показаны конструкция и схема включения статорных и роторных обмоток трехфазного асинхронного двигателя.
Рис.2.10. Конструкция (а) и схема включения статорных и роторных обмоток (б) трехфазного асинхронного двигателя
В неподвижном статоре расположены три катушки, создающие круговое вращающееся магнитное поле, а во вращающемся роторе - три катушки, замкнутые накоротко или на внешние сопротивления через контактные кольца и щетки. Если число катушек обмотки статора равно 3, т. е. на каждую фазу одна катушка, то за одну минуту вектор  сделает 60 f оборотов вокруг оси статора. При необходимости иметь меньшую скорость применяются многополюсные обмотки. Каждая обмотка имеет одну пару полюсов. Если к каждой фазе подключить
сделает 60 f оборотов вокруг оси статора. При необходимости иметь меньшую скорость применяются многополюсные обмотки. Каждая обмотка имеет одну пару полюсов. Если к каждой фазе подключить  катушек, то общее число катушек обмотки статора будет равно
катушек, то общее число катушек обмотки статора будет равно  . Для характеристики размещения обмотки вдоль рабочего зазора двигателя введено понятие полюсного деления
. Для характеристики размещения обмотки вдоль рабочего зазора двигателя введено понятие полюсного деления  :
:
 , ,
| (2.7) |
где
D - внутренний диаметр статора.
За один период переменного тока вращающееся магнитное поле поворачивается на двойное полюсное деление 2 :  , а полный оборот вокруг оси машины оно делает за периодов. Следовательно:
, а полный оборот вокруг оси машины оно делает за периодов. Следовательно:
за время ( ) с - 1 оборот;
) с - 1 оборот;
за 1с.-  [оборотов];
[оборотов];
за минуту в 60 раз больше, т. е.
 [об/мин], [об/мин],
| (2.8) |
где
 - частота питающей сети.
- частота питающей сети.
Вращающийся магнитный поток Ф индуктирует в обмотках статора и ротора ЭДС  и
и  .
.
Так как обмотка ротора закорочена, то в ней возникает ток  , который, взаимодействуя с магнитным полем, вызовет появление вращающегося момента
, который, взаимодействуя с магнитным полем, вызовет появление вращающегося момента  . В результате ротор начнет вращаться в сторону вращения магнитного поля. Величина ЭДС и частота
. В результате ротор начнет вращаться в сторону вращения магнитного поля. Величина ЭДС и частота  ее изменения зависят от скорости пересечения вращающим магнитным полем проводников обмотки ротора, т. е. от разности скоростей вращения магнитного поля
ее изменения зависят от скорости пересечения вращающим магнитным полем проводников обмотки ротора, т. е. от разности скоростей вращения магнитного поля  и ротора
и ротора  . При равенстве этих скоростей ЭДС , частота , ток и момент будут равны нулю. По этой причине электрические машины, работающие на этом принципе, называют асинхронными.
. При равенстве этих скоростей ЭДС , частота , ток и момент будут равны нулю. По этой причине электрические машины, работающие на этом принципе, называют асинхронными.
Относительная разность скоростей вращения поля и ротора

| (2.9) |
называется скольжением. Нетрудно видеть, что
 . .
| (2.10) |
В заторможенном режиме асинхронная машина работает в режиме трансформатора; ее схема замещения подобна схеме замещения приведенного трансформатора. Ток холостого хода асинхронной машины значительно выше, чем у трансформатора, так как в ней имеется рабочий зазор. Поэтому этот режим работы машины редко применяется.
В рабочем режиме частота равна
 ; ;
| |
 ; ;
| (2.11) |
 ; ;
| (2.12) |
 . .
| (2.13) |
Энергетическая диаграмма работы машины имеет вид (рис.2.11):
Рис.2.11.Энергетическая диаграмма работы электрической машины
Мощность, потребляемую из электрической сети можно определить, используя выражение:
 .
.
В ротор передается электромагнитная мощность  (рис.2.11).
(рис.2.11).
Часть этой мощности расходуется на покрытие электрических потерь в обмотке ротора; оставшаяся часть превращается в механическую мощность
 .
.
Потери в сердечнике ротора из-за малой величины частоты (1 3 Гц) практически отсутствуют. Для электромагнитной мощности можно написать:
 ,
,
где
 - угловая скорость вращения магнитного поля.
- угловая скорость вращения магнитного поля.
 ,
,
где
 - угловая скорость вращения ротора.
- угловая скорость вращения ротора.
 .
.
Отсюда

| (2.14) |
Подставив сюда: 

 ,
,
получаем:

| (2.15) |
Схема замещения цепи ротора при его вращении имеет вид (рис.2.12):

Рис.2.12. Схема замещения цепи ротора
Из рис.2.12 можем записать:
 .
.
Так как 
 (здесь
(здесь  - индуктивное сопротивление заторможенного ротора), то
- индуктивное сопротивление заторможенного ротора), то
 . .
| (2.16) |
Теперь схему замещения ротора можно представить в виде (рис.2.13):

| а) | б) |
Рис.2.13. Схема замещения роторной цепи машины при вращении ротора без выделения (а) и с выделением (б) сопротивления механической мощности
Сопротивление  учитывает выходную механическую мощность асинхронной машины (рис. 2.13б). Полная схема замещения асинхронной машины имеет вид (рис.2.14а):
учитывает выходную механическую мощность асинхронной машины (рис. 2.13б). Полная схема замещения асинхронной машины имеет вид (рис.2.14а):
 а)
а)
 б)
б)
Рис.2.14 Полная схема замещения асинхронной короткозамкнутой машины (а) и ее упрощенная схема (б)
Без большой погрешности намагничивающую часть схемы можно непосредственно подключить к питающему напряжению  (рис.2.14б). Ошибка, вносимая этим допущением, невелика потому, что в последней схеме не учитывается лишь влияние падения напряжения на активном сопротивлении первичной обмотки
(рис.2.14б). Ошибка, вносимая этим допущением, невелика потому, что в последней схеме не учитывается лишь влияние падения напряжения на активном сопротивлении первичной обмотки  и индуктивности рассеяния первичной обмотки
и индуктивности рассеяния первичной обмотки  от намагничивающего тока
от намагничивающего тока  на величину тока ротора. Эта схема не отражает зависимости намагничивающего тока от нагрузки двигателя, так как определяет неизменное значение этого тока
на величину тока ротора. Эта схема не отражает зависимости намагничивающего тока от нагрузки двигателя, так как определяет неизменное значение этого тока
Определим ток фазы ротора как функцию параметров двигателя:
 , ,
| (2.17) |
где  - индуктивное сопротивление короткого замыкания.
- индуктивное сопротивление короткого замыкания.
Величина определяется выражением
 .
.
Критическое скольжение, соответствующее максимуму момента определяется дифференцированием полученного выражения по  и последующим приравниванием к нулю результата:
и последующим приравниванием к нулю результата:
 . .
| (2.18) |
Подставив полученное выражение в зависимость  , получим
, получим
 . .
| (2.19) |
С учетом последних двух зависимостей, выражение для M может быть представлено в виде так называемой уточненной формулы Клосса:
 , ,
| (2.20) |
где
 . .
| (2.21) |
Анализ выражения механической характеристики показывает, что при  она близка к линейной зависимости
она близка к линейной зависимости  , а в области больших скольжений
, а в области больших скольжений  имеет гиперболический характер:
имеет гиперболический характер:  . Максимальный момент, развиваемый асинхронной машиной в двигательном режиме
. Максимальный момент, развиваемый асинхронной машиной в двигательном режиме  меньше, чем соответствующее значение момента для генераторного режима работы
меньше, чем соответствующее значение момента для генераторного режима работы  . С помощью выражения для
. С помощью выражения для  эту разницу можно выразить количественно:
эту разницу можно выразить количественно:
 , ,
| (2.22) |
где
 - модуль критического скольжения.
- модуль критического скольжения.
По выражению (2.20) на рис. 2.15 построена зависимость момента от скольжения M=F(s).
Рис. 2.15. Зависимость момента асинхронной машины от скольжения
В реальных асинхронных машинах ЭДС и магнитный поток при работе машины в двигательном режиме по мере роста нагрузки и связанного с ним падения напряжения в цепи статора снижаются. Изменение фазы тока статора и падения напряжения на сопротивлении  приводят к тому, что ЭДС двигателя и поток
приводят к тому, что ЭДС двигателя и поток  в области малых скольжений возрастают и превышают значения, соответствующие идеальному холостому ходу. Поэтому в соответствии с выражением
в области малых скольжений возрастают и превышают значения, соответствующие идеальному холостому ходу. Поэтому в соответствии с выражением  максимум момента в генераторном режиме при
максимум момента в генераторном режиме при  больше, чем в двигательном. Двигатель с фазным ротором обеспечивает возможность изменения параметров цепей ротора путем введения добавочных сопротивлений. Механические характеристики двигателя с фазным ротором (2.16а):
больше, чем в двигательном. Двигатель с фазным ротором обеспечивает возможность изменения параметров цепей ротора путем введения добавочных сопротивлений. Механические характеристики двигателя с фазным ротором (2.16а):

| а) | б) |

| в) | г) |
Рис. 2.16. Механические характеристики асинхронной машины при различных способах управления изменениями: активного сопротивления в цепи ротора (а), реактивного сопротивления в цепи статора (б), напряжения (в) и частоты (г) питающей цепи
Максимум момента не зависит от величины суммарного сопротивления в цепи фазы ротора, а критическое скольжение увеличивается пропорционально суммарному сопротивлению  :
:
 .
.
Из характеристик рис. 2.16a видно, что при пуске двигателя выгодно иметь большое сопротивление  , т.к. при этом обеспечивается большая величина пускового момента. Увеличение сопротивления в цепи ротора ограничивает также ток в двигателе в режиме противовключения. Плавным изменением сопротивления
, т.к. при этом обеспечивается большая величина пускового момента. Увеличение сопротивления в цепи ротора ограничивает также ток в двигателе в режиме противовключения. Плавным изменением сопротивления  при торможении противовключением и последующем пуске в противоположном направлении можно обеспечить постоянство тормозного и пускового моментов двигателя в этих режимах.
при торможении противовключением и последующем пуске в противоположном направлении можно обеспечить постоянство тормозного и пускового моментов двигателя в этих режимах.
Модуль жесткости рабочего участка механической характеристики обратно пропорционален величине , поэтому реостатные характеристики двигателя при больших добавочных сопротивлениях имеют невысокую жесткость.
При введении в цепь ротора добавочных индуктивных сопротивлений, уменьшаются величины  и . Влияние добавочных сопротивлений, включенных в цепь статора
и . Влияние добавочных сопротивлений, включенных в цепь статора  , аналогично влиянию добавочных индуктивностей (рис. 2.16б).
, аналогично влиянию добавочных индуктивностей (рис. 2.16б).
В пределах рабочего участка механической характеристики асинхронной машины, когда ток статора существенно не превышает номинальное значение, ЭДС двигателя E незначительно отличается от напряжения сети:
 .
.
Из этого выражения следует, что при  изменение напряжения приводит к изменению потока машины. Так как в номинальном режиме магнитная цепь машины насыщена, то повышение напряжения питания даже на 20-30% может увеличить ток холостого хода машины до значений, превышающих номинальный ток
изменение напряжения приводит к изменению потока машины. Так как в номинальном режиме магнитная цепь машины насыщена, то повышение напряжения питания даже на 20-30% может увеличить ток холостого хода машины до значений, превышающих номинальный ток  , и двигатель может нагреться выше нормы даже при отсутствии полезной нагрузки на его валу. Снижение напряжения питания приводит к уменьшению магнитного потока. Форма механических характеристик асинхронной машины при
, и двигатель может нагреться выше нормы даже при отсутствии полезной нагрузки на его валу. Снижение напряжения питания приводит к уменьшению магнитного потока. Форма механических характеристик асинхронной машины при  ,
,  (рис. 2.16в) говорит о том, что пропорционален квадрату приложенного напряжения, а
(рис. 2.16в) говорит о том, что пропорционален квадрату приложенного напряжения, а  .
.
При  ,
,  изменение частоты питающего напряжения приводит к пропорциональному изменению величины
изменение частоты питающего напряжения приводит к пропорциональному изменению величины  . Так как , то обратно пропорционален частоте . В номинальном режиме машина насыщена при
. Так как , то обратно пропорционален частоте . В номинальном режиме машина насыщена при  , поэтому допустимо только увеличение частоты
, поэтому допустимо только увеличение частоты  , что вызывает соответствующее уменьшение потока . В соответствии с выражением
, что вызывает соответствующее уменьшение потока . В соответствии с выражением
увеличение приводит к уменьшению критического момента. Критическое скольжение при этом также уменьшается, а скорость холостого хода увеличивается.
При необходимости уменьшения частоты  для снижения скорости
для снижения скорости  необходимо дополнительно изменить напряжение питания так, чтобы поток поддерживался примерно постоянным.
необходимо дополнительно изменить напряжение питания так, чтобы поток поддерживался примерно постоянным.
7. уравнение Электромеханической и механической характеристики АД. Искусственные характеристики АД
Для вывода уравнения механической характеристики воспользуемся упрощенной схемой замещения двигателя (см. рис. 3.3), где обозначено:  – фазное напряжение;
– фазное напряжение;  – фазный ток статора и приведенный фазный ток ротора соответственно;
– фазный ток статора и приведенный фазный ток ротора соответственно;  – ток намагничивания, приблизительно равный току холостого хода двигателя; x 1, x 2 ' – индуктивное сопротивление рассеяния обмотки статора и приведенное индуктивное сопротивление обмотки ротора; R 1, R 2 ' – активное сопротивление обмотки статора и приведенное сопротивление обмотки ротора; R μ , x μ – активное и реактивное сопротивление контура намагничивания, которые определяются параметрами взаимоиндукции статорной и роторной цепей. Такую схему замещения можно построить на основании уравнений (3.6), если принять
– ток намагничивания, приблизительно равный току холостого хода двигателя; x 1, x 2 ' – индуктивное сопротивление рассеяния обмотки статора и приведенное индуктивное сопротивление обмотки ротора; R 1, R 2 ' – активное сопротивление обмотки статора и приведенное сопротивление обмотки ротора; R μ , x μ – активное и реактивное сопротивление контура намагничивания, которые определяются параметрами взаимоиндукции статорной и роторной цепей. Такую схему замещения можно построить на основании уравнений (3.6), если принять
C 1≈ 1+ x 1/ x μ ≈ 1,
где C 1 – модуль комплексного коэффициента, характеризующего соотношение сопротивлений статорной цепи и цепи контура намагничивания.
Рис. 3.3. Схема замещения асинхронного двигателя
В соответствии со схемой замещения можно получить выражение для тока ротора:
(3.7)
Электромагнитная мощность, передаваемая через воздушный зазор, определяется выражением
P э= M ω 0,
где M – момент на валу двигателя. Механическая мощность на валу двигателя определяется выражением
P = M ω.
Потери мощности в цепи ротора представим в виде
M · s ω 0.
С другой стороны, потери мощности в цепи трехфазного ротора определяются выражением
Δ P =3(I 2 ')2 R 2 '.
Приравнивая правые части уравнений (3.2) и (3.3), выразим момент двигателя через ток ротора:
M =3(I 2 ')2 R 2 ' /(ω 0 s).
Подставляя в последнее выражение I 2 ' из (3.7), получим
M (s)=3 U ф2 R 2 ' /[ω 0 s ((R 1+ R 2 ' / s)2+(x 1+ x 2 ')2)].
Выражение (3.10) является механической характеристикой асинхронного двигателя. Нетрудно заметить, что при s → 0 и при s → ∞ момент M → 0, следовательно, функция момента имеет максимум. Известным способом, из уравнения ∂ M /∂ s =0 определим значение критического скольжения s к, при котором двигатель развивает максимальный (критический) момент:

где
x к= x 1+ x 2 '.
Подставляя полученное значение s к в (3.10), получим выражение для критического момента
Здесь знак «+» соответствует двигательному режиму, а знак «–» – генераторному.
Если выражение (3.10) разделить на (3.12), то после преобразований получим уравнение приведенной механической характеристики
M (s)=2 M к(1+ as к)/(s / s к+ s к/ s +2 as к).
где a = R 1/ R 2 '.
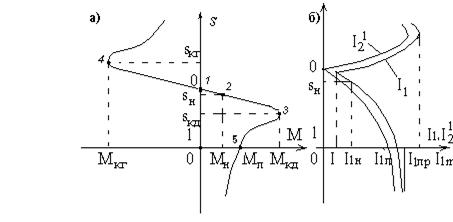
Рис. 3.4. Механическая и электромеханическая характеристики асинхронного двигателя
Механическая характеристика, соответствующая (3.13), представлена на рис. 3.4.а. Она имеет несколько характерных точек:
s =0, M =0 – точка холостого хода, скорость равна синхронной;
s = s н, M = M н – точка номинального режима, скорость равна номинальной;
s = s кд, M = M кд – точка максимального момента в двигательном режиме;
s =− s кг, M = M кг – точка максимального момента в генераторном режиме;
s =1, M = M п – точка пускового режима.
Существуют асинхронные двигатели, у которых механическая характеристика дважды меняет знак жесткости. Тогда выделяют точки минимального момента для двигательного и генераторного режимов.
Значение пускового момента просто получить из (3.13), принимая s =1:
M п=2 M к s к(1+ as к)/(1+ s к2(1+2 a)).
В ряде случаев, пренебрегая активным сопротивлением обмотки статора, при s < s к выражение момента можно представить линеаризованной зависимостью
M (s)= s / s к·2 M к.
На рабочем участке характеристики это выражение оказывается достаточно точным. Из (3.15) получим простое приближенное соотношение для определения жесткости на рабочем участке характеристики
β =2 M к/ s к,
Уравнение (3.7) можно назвать электромеханической характеристикой двигателя, но только по отношению к вторичному приведенному току. Как следует из схемы замещения, ток, потребляемый двигателем, равен векторной сумме приведенного к статору тока ротора (I 2 ') и тока намагничивания (I μ ). Последний, в первом приближении, можно считать постоянным. Тогда с учетом (3.7) электромеханическая характеристика двигателя имеет вид рис. 3.4.б, где обозначено I μ – ток намагничивания, I 1н – номинальный потребляемый ток двигателя, I 1п – пусковой ток, I 1пр – предельный ток двигателя, который он имеет при s =±∞, I 1м – максимальный ток двигателя.
Искусственные характеристики асинхронного двигателя получим из уравнений (3.11) и (3.12), согласно которым s к и M кизменяются при изменении следующих параметров: фазного напряжения, активного сопротивления цепи ротора, индуктивного и активного сопротивления цепи статора, и, в неявном виде, при изменении частоты питания двигателя. Соответствующее этим изменениям семейство искусственных характеристик в первом квадранте плоскости s – M представлено на рис. 3.5.
Можно отметить, что согласно (3.11) и (3.12) при изменении активного сопротивления в цепи ротора момент критический не изменяется, а скольжение увеличивается при увеличении сопротивления – рис. 3.5.а, т.е. при введении добавочного сопротивления в цепь ротора жесткость механической характеристики уменьшается.
При изменении фазного напряжения неизменным остается критическое скольжение, критический момент уменьшается при уменьшении напряжения, т.е. жесткость механической характеристики также уменьшается, рис. 3.5.б.
При увеличении индуктивного сопротивления обмотки статора, например, путем введения в его цепь реактора (дросселя) примерно пропорционально уменьшаются и скольжение и критический момент, поэтому жесткость уменьшается, рис. 3.5.в.
При изменении частоты напряжения питания двигателя, во-первых, пропорционально изменяется скорость вращения поля статора, во-вторых, одновременно меняются и скольжение, и критический момент, рис. 3.3.г. Более подробно характеристики двигателя при изменении частоты мы рассмотрим ниже.

Рис. 3.5. Искусственные механические характеристики асинхронного двигателя
7. Обобщенная функциональная схема привода представлена на рис. 5.1, где обозначено: РЧ – регулятор частоты; РН – регулятор напряжения; БП – блок преобразователей частоты и напряжения; ДН – датчик напряжения; ФП – функциональный преобразователь; U 0 – напряжение задания скорости; U с – напряжение первичного источника.
Рис. 5.1. Функциональная схема разомкнутого частотно-регулируемого привода
Указанная схема реализует алгоритм частотного управления приводом, описанный в п. 3.1.5, в соответствии с которым одновременно с частотой меняется напряжение, например, по уравнению (3.25). Требуемый закон изменения напряжения в зависимости от частоты реализуется функциональным преобразователем. С помощью такой схемы можно реализовать электропривод с семейством параллельных механических характеристик так же, как в электроприводе постоянного тока при якорном управлении. Однако при низких частотах вращения трудно обеспечить параллельность характеристик из-за влияния активного сопротивления обмотки статора.
Имеются различные модификации описанной схемы. В частности, нашла применение схема с токовым управлением, функциональная схема которой представлена на рис. 5.2, где обозначено: ДТ – датчик тока; РТ – регулятор тока; U зт – напряжение задания тока; U зч – напряжение задания частоты.
Рис. 5.2. Функциональная схема привода с токовым управлением
Из теории электрических машин известно, что при стабилизированном токе критический момент двигателя (Mki) и критическое скольжение (Ski) не зависят от частоты. При этом Mki больше, чем критический момент двигателя, работающего на естественной характеристике от источника напряжения. Характеристики привода, построенного по такой схеме, аналогичны характеристикам привода постоянного тока с отрицательной обратной связью по току, т.е. значительно мягче естественных, поэтому рассмотренная схема может быть рекомендована в системах регулирования момента. Практическая реализация такой схемы возможна только при строгом задании критического скольжения, что возможно в системах с обратной связью по скорости.
В основе построения таких систем лежит принудительное формирование скольжения асинхронного двигателя по сигналам датчиков частоты вращения. При этом используется тот же датчик, который устанавливается в канале главной обратной связи привода. Функциональная схема привода представлена на рис. 5.1, где знаком «+» обозначено устройство суммирования частоты обратной связи, т.е. частоты вращения f =ω p /(2π) и частоты задания скольжения f 2= Sf н. С помощью этого устройства формируется заданное скольжение. Так как по мере роста скорости растет и частота так, что скольжение остается постоянным.
Рис. 5.3. Функциональная схема частотно-управляемого привода с обратной связью
В зави
|
|