Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Регулирование скорости вращения двигателя постоянного тока с последовательным возбуждением
|
|
Принято анализировать с помощью электромеханической характеристики:
 (113)
(113)
Следовательно; регулировать скорость вращения двигателя постоянного тока с последовательным возбуждением (ДПТ с ПВ) принципиально можно 3-мя методами:
1. 
2.  , последовательно с цепью якоря и обмоткой возбуждения
, последовательно с цепью якоря и обмоткой возбуждения
3. 
1. Регулирование скорости ДПТ ПВ с .
Для того чтобы проанализировать этот способ регулирования введём понятие «» граничная скорость  - это угловая скорость ДПТ при условии что внутреннее сопротивление цепи якоря
- это угловая скорость ДПТ при условии что внутреннее сопротивление цепи якоря  .
.
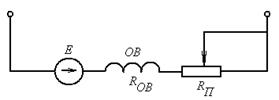
Рис. 101 Схема регулирования скорости ДПТ с ПВ изменением напряжения подводимого к якорю.
 (114)
(114)
Из выражения видно, что электромеханическая характеристика  , будет представлять, из себя кривую асимптотическую приближающуюся к осям.
, будет представлять, из себя кривую асимптотическую приближающуюся к осям.
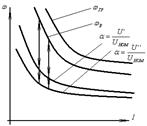
Рис. 102 Электромеханические характеристики при изменении напряжения
Запишем (113) с учётом (114).


 (115)
(115)
Напряжение относительно номинального можно изменить только в сторону убывания. Обозначим:

 - регулируемое напряжение.
- регулируемое напряжение.
(116)
 - сопротивление цепи якоря.
- сопротивление цепи якоря.
Эта характеристика будет проходить параллельно к  , но несколько ниже.
, но несколько ниже.
Для того чтобы определить вид регулирований характеристики найдем:

Таким образом, перепад скоростей между естественной и регулировочной характеристикой будет тем больше, чем больше .
Таким образом, жесткость регулировочных характеристик по мере снижения угловых скоростей возрастет.
Стабильность регулировочных характеристик выше, чем естественной.
Недостатком является низкая энергетическая эффективность, и поэтому  .
.
Для некоторого расширения  , последовательно с ОВ вводят добавочное сопротивление
, последовательно с ОВ вводят добавочное сопротивление  которое позволяет несколько уменьшить
которое позволяет несколько уменьшить  .
.
2. Регулирование добавочным сопротивлением вводимого в цепь якоря  .
.
(117)



Отсюда видно, что при увеличении , жесткость механических характеристик будет уменьшаться.
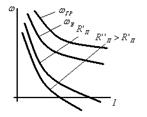
Рис. 103 Механические характеристики ДПТ с ПВ при реостатном регулировании.
Этот способ регулирования обладает низкими энергетическими показателями и кроме того не обеспечивает необходимой устойчивости работы ЭП. т.к имеет низкую стабильность поэтому диапазон регулирования  .
.
3. Регулирование изменением магнитного потока
Этот способ регулирования при условии поддержания тока якоря  может быть реализован 2-мя способами:
может быть реализован 2-мя способами:
1. шунтированием обмотки возбуждения
2. шунтированием обмотки якоря
|
|