Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Способы реализации цифровых систем
|
|
Цифровой называется система, управление в которой осуществляется с помощью цифровых вычислительных устройств.
Кроме цифровых, применяются цифро-аналоговые системы, в состав управляющего устройства которых входят наряду с цифровыми устройствами звенья непрерывного действия (аналоговые).
Входными данными для цифрового устройства управления могут быть задающий сигнал и сигналы обратных связей, которые преобразуются в выходной сигнал управления, представленный в двоичной системе счисления.
Преимущества цифрового управления перед непрерывным заключаются в высокой помехоустойчивости и точности, а также в возможности создания на основе однотипных цифровых элементов сложных систем управления технологическими объектами.
Цифровые устройства управления могут быть построены на основе программной и аппаратурной реализации. В случае аппаратурной реализации преобразование входных данных в сигнал управления осуществляется по алгоритму, зависящему от электрических соединений между элементами цифрового устройства. Пример такой системы управления электроприводом представлен на рис. 2.8. Здесь SM1, SM2 – сумматоры; F – формитрователь импульсов; A-D – аналого-цифровой преобразователь; транзисторы VT1, VT2 выполняют функцию транзисторного усилителя мощности; M – двигатель постоянного тока; BR – тахогенератор; R2 – согласующий потенциометр; Rl – измерительное сопротивление в цепи якоря, служащее датчиком тока; uз – задающий сигнал в виде двоичного кода; uс – синхронизирующий сигнал.
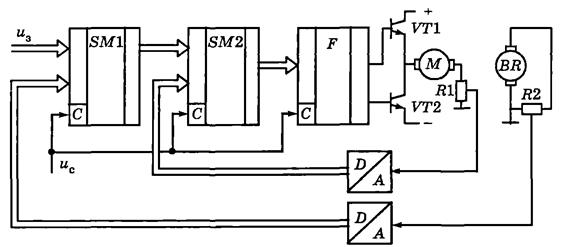
Рис. 2.8. Система с аппаратурной реализацией цифрового управления
В случае программной реализации преобразование входных данных в сигнал управления осуществляется путем вычисления по программе, записанной в память. Вычислительное устройство, предназначенное для управления, это специализированная ЭВМ, называемая контроллером (микропроцессором) (рис. 2.9). Здесь П – процессор; ОЗУ – оперативное запоминающее устройство, ПЗУ – постоянное запоминающее устройство; УВВ1...УВВn – устройство ввода-вывода информации; D-A – цифро-аналоговый и A-D аналого-цифровой преобразователи; ОУ – объект управления; x1, x2,..., xn – его переменные состояния; uз – задающее воздействие.
Процессор выполняет вычисление сигнала управления по программе, хранящейся в ПЗУ и защищенной от доступа. Исходной информацией для вычисления служат задающее воздействие uз и информация о переменных состояния, поступающая по каналам обратных связей, а также параметры для расчета, хранящиеся в памяти. В результате вычислений получается сигнал управления uk в виде двоичного кода.
Цифро-аналоговый и аналого-цифровой преобразователи требуются не всегда. Функцию аналого-цифрового преобразования зачастую выполняют датчики. В свою очередь сигнал управления в двоичном коде может быть непосредственно использован для формирования состояния силовых ключей (транзисторов, тиристоров) преобразовательного устройства.
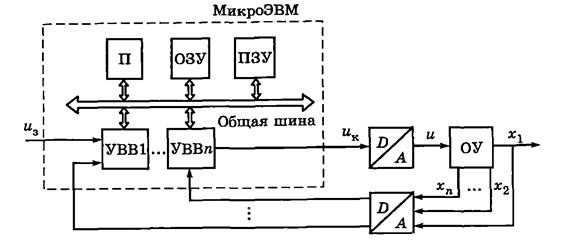
Рис. 2.9. Система с программной реализацией цифрового управления
Как аппаратурная, так и программная реализации управления имеют преимущества и недостатки. Аппаратурная реализации обладает более высоким быстродействием. Недостатком является отсутствие гибкости системы, так как переход к другому алгоритму потребует изменений в электрической схеме устройства управления.
Преимущество программной реализации – гибкость устройства управления, выражающаяся в возможности изменять алгоритм управления программным путем, не изменяя электрической схемы устройств. Недостаток – низкое быстродействие, поскольку время обработки информации зависит от времени выполнения команд программы.
Время цикла обработки информации определяется выражением T = tв + tвып + tвыв, где tв – время выборки (чтения входных данных); tвып – время выполнения вычислений; tвыв – время вывода вычисленного сигнала управления на вход объекта.
Как при аппаратурной, так и при программной реализации получается квантование сигнала по времени, так как в течение интервала дискретности t сигнал uk сохраняет постоянное значение (рис. 2.10, а). Сигнал uk, действующий на интервале (tk, tk+1), получен на основании обработки информации, поступившей в момент времени tk-1, и поэтому получается запаздывание, равное t.
Цифровое управляющее устройство (ЦУУ) выполняет квантование сигналов по уровню вследствие ограниченного числа двоичных разрядов, которыми представлены переменные. Так, при числе двоичных разрядов c = 8 диапазон представляемых целых чисел 0...2c – 1 = 256 – 1 = 255.
Квантование по уровню делает характеристику вход-выход управляющего устройства нелинейной (рис. 2.10, б).
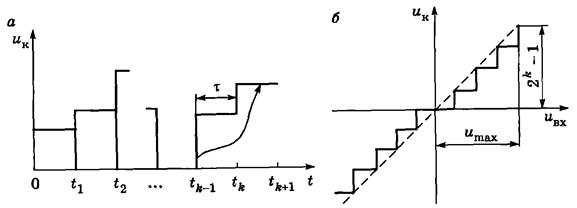
Рис. 2.10. Квантование по времени (а) и по уровню (б) в цифровом управляющем устройстве
Исходя из изложенного система с ЦУУ имеет вид, показанный на рис. 2.11. Здесь ЦУУ представлено в виде совокупности следующих динамических звеньев: функционального преобразователя ФП, отражающего алгоритм вычисления управляющего сигнала; нелинейного звена НЗ, учитывающего квантование по уровню; амплитудно-импульсного модулятора АИМ, учитывающего квантование по времени; звена запаздывания 33, учитывающего время T обработки информации.
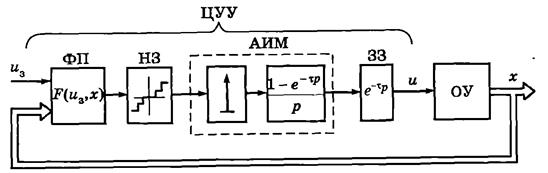
Рис. 2.11. Структура системы с цифровым устройством управления
На рис. 2.11 ОУ – объект управления; х = (x1, x2,..., xn) – вектор переменных состояния; uз – задающий сигнал.
Обычно, поскольку современные микропроцессорные устройства имеют достаточно высокую разрядность, для упрощения синтеза системы квантованием по уровню можно пренебречь. Тогда НЗ превращается в звено с насыщением и линейным участком, имеющим наклон (2c – 1)/umax (штриховая линия на рис. 2.10, б).
На базе структурного представления ЦУУ (см. рис. 2.11) для конкретного объекта управления могут быть построены структурные схемы для операторных р - и z -преобразований и получены соответствующие передаточные функции разомкнутой и замкнутой систем с цифровым управлением.
|
|