Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Назначение и принцип действия шагового электропривода
|
|
В практике инженера часто встречаются исполнительные устройства на шаговых двигателях (ШД). Принтеры, факсы, станки с ЧПУ, стиральные машины, дисководы, видеоплееры – вот далеко не полный перечень устройств, использующих ШД.
Применение шаговых двигателей очень широко представлено в промышленности, например, в проявочных и упаковочных машинах.
Одно из применений в учебных целях – это радиолюбительские модели, исполнительные узлы роботов, привод редукторов точного поворота антенн. Электропривод на базе ШД можно также применить в качестве привода в станках для точного сверления и калибровки отверстий небольшого диаметра, в транспортерных линиях и т.п..
Таким образом, разработка перспективных схем управления шаговыми двигателями на основе микропроцессорных устройств является актуальным и позволит значительно повысить качество работы автоматизированных электроприводов РЭС.
Рассмотрим принцип действия шаговых двигателей. Исполнительные шаговые двигатели преобразуют электрический управляющий сигнал в дискретное (скачкообразное) угловое перемещение выходного вала, называемое угловым шагом. По принципу работы шаговые двигатели являются синхронными, так как электромагнитный момент, действующий на их ротор, создается силами магнитного притяжения полюсов статора и ротора.
Шаговые двигатели получили наибольшее применение в автоматизированном программном электроприводе, например в станках с числовым управлением. Используются шаговые двигатели с пассивным (невозбужденным) и активным (возбужденным) ротором.
Шаговые двигатели с пассивным ротором. Такие двигатели называют реактивными. Статор реактивного трехфазного шагового двигателя, представленного на рисунке 13.7, имеет шесть явно выраженных полюсов (по два полюса на фазу), а ротор – два выступа (невозбужденных полюса). Оси полюсов статора сдвинуты в пространстве относительно друг друга на угол 600. При подаче импульса напряжения u 1 на обмотку фазы 1 в обмотке этой фазы статора проходит импульс тока i 1. При этом ротор занимает положение, при котором его ось совмещается с осью 1 – 1. В момент времени t 1 импульс напряжения u 2 создаст на фазе 2 статора импульс тока i 2. При этом ротор, под действием сил магнитного притяжения, обусловленных одновременным намагничиванием полюсов 1 – 1 и 2 – 2 статора, повернется на угол α ш = 300. В момент времени t 2 импульс тока в фазе 1 прекратится, и ротор, совершив еще один шаг α ш = 300, займет положение по оси 2 – 2. В момент t 3 появится импульс тока в фазе 3 и ротор, повернувшись на 300, займет среднее положение между полюсами 2 – 2 и 3 – 3. Суммарные угол поворота ротора составит 900. В моменты времени t 4, t 5 и t 6 ротор также будет совершать угловые шаги по 300 и в конце цикла займет положение по оси полюсов статора 1 – 1, совершив половину оборота (1800).
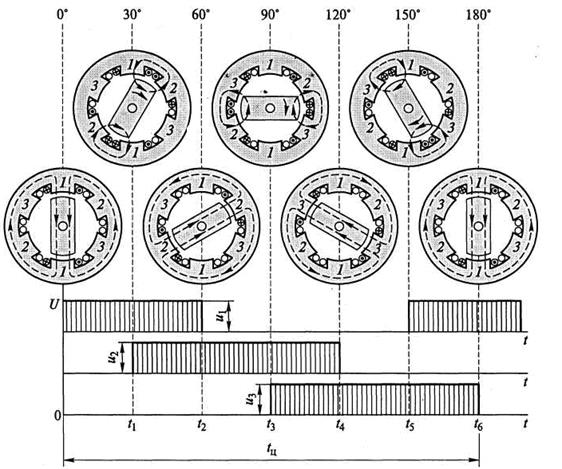
Рисунок 13.7 – К принципу действия реактивного шагового двигателя
В последующие циклы подачи на обмотку статора управляющих импульсов напряжения u 1, u 2 и u 3 процессы в шаговом двигателе будут повторяться.
Рассматриваемый двигатель работает по шеститактной схеме коммутации с раздельно-совместимым включением обмоток фазы:
1→ (1 + 2) → 2 → (2 + 3) → 3 → (3+1) → 1 и т.д.
Реактивные шаговые двигатели работают от однополярных импульсов, так как изменение полярности импульса не меняет направления сил, действующих на невозбужденный ротор. Чтобы изменить направление вращения ротора (реверс) шагового двигателя, необходимо поменять схему коммутации обмоток статора, например, принять
1→ (1 + 3) → 3 → (3 + 2) → 2 → (2 + 1) → 1 и т.д.
Если в рассматриваемом двигатели принять схему коммутации с раздельным включением обмоток статора: 1→ 2 → 3 → 1 и т. д, то угловой шаг реактивного шагового двигателя с электромагнитной редукцией двигателя увеличится в два раза: α ш = 600.
В общем случае угловой шаг двигателя
 ,
,
где 2 р 2 – число полюсных выступов на роторе;
m 1 – число фаз обмотки статора;
kф 1 – коэффициент, зависящий от способа включения фаз обмотки статора (при раздельном включении kф 1 = 1, при раздельно-совместном kф 2 = 2).
Уменьшение углового шага α ш повышает быстродействие шагового двигателя. При этом сокращается время на перемещение ротора при обработке сигнала и увеличивается точность работы шагового двигателя. Для уменьшения углового шага α ш увеличивают число полюсных выступов на роторе 2 р 2. Если в рассматриваемом двигателе применить ротор крестообразного сечения с 2 р 2 = 4, то при раздельно-совместном включении обмоток фаз статора угловой шаг уменьшится вдвое: α ш = 150. Дальнейшее уменьшение шага возможно при использовании в двигателе принципа электромагнитной редукции скорости.
На полюсных наконечниках статора и поверхности цилиндрического ротора делают открытые пазы, придавая поверхностям этих элементов гребенчатую форму. Пазы на статоре и роторе выполняют с одинаковым шагом. На рисунке 13.8 показана конструкция шагового двигателя с числом полюсов на статоре 2 р = 8 и числом пазов на цилиндрическом роторе Z 2 = 36. При этом на каждом полюсном наконечнике сделано 2 паза, так что число пазов на статоре Z 1 = 2· 8 = 16. Угловой шаг этого двигателя α ш = 2, 50. Возможно и дальнейшее уменьшение шага.
Недостаток реактивных шаговых двигателей с электромагнитной редукцией – небольшой вращающий момент. Основной недостаток шаговых двигателей с пассивным ротором – отсутствие фиксации ротора при снятии управляющего сигнала.
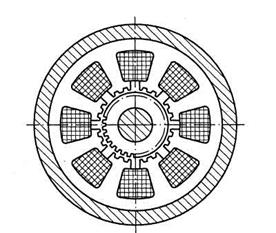
Рисунок 13.8 – Устройство реактивного шагового двигателя
с редукцией скорости
Один из основных параметров шаговых двигателей – частота приемистости fпр, представляющая собой наибольшую частоту следования управляющих импульсов, при которой ротор двигателя втягивается в синхронизм с места без потери шага.
Частота приемистости зависит от нагрузки на вал шагового двигателя: в режиме холостого хода наибольшая частота приемистости fпр max, а с появлением нагрузки она уменьшается. Частота приемистости при номинальной нагрузке реактивных шаговых двигателей fпр ном = 1000 – 1200 Гц. При увеличении углового шага частота приемистости уменьшается.
Шаговый двигатель работает совместно с электронным коммутатором, преобразующим заданную последовательность управляющих импульсов в m 1-фазную систему импульсов напряжения прямоугольной формы.
Шаговые двигатели с активным ротором. Ротор такого двигателя выполнен из постоянного магнита, а статор – такой же, как у реактивных шаговых двигателей, т.е. с сердечником с явно выраженными полюсами и многофазной обмоткой. В шаговом двигателе с активным ротором можно применять двухполярные импульсы напряжения, так с изменением направления тока в обмотке фазы статора меняется магнитная полярность соответствующих полюсов. Так как ротор двигателя намагничен, то изменение полярности полюсов статора вызывает изменение направления сил взаимодействия между полюсами статора и ротора.
Рассмотрим принцип действия двухфазного двигателя с двухполюсным постоянным магнитом на роторе и четырьмя явно выраженными полюсами на статоре (рисунок 13.9).
При подаче импульса напряжения положительной полярности (+ u 1) в обмотку первой фазы два полюса этой фазы приобретают магнитную полярность, как показано на рисунке 13.9, а, при этом ротор занимает вертикальное положение по оси 1 – 1, обусловленное направлением сил взаимного притяжения полюсов статора и ротора разноименной полярности. В момент времени t 1 импульс в первой фазе прекращается и поступает положительный импульс (+ u 2) во вторую фазу.
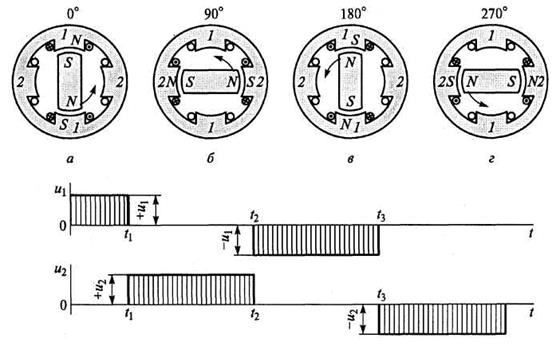
Рисунок 13.9 – К принципу действия шагового двигателя с активным
ротором
При этом обмотка первой фазы обесточивается, а полюса второй фазы приобретают магнитную полярность, как показано на рисунке 13.9, б. В результате ротор поворачивается против часовой стрелки на α ш = 900. В момент времени t 2 на обмотку первой фазы подается импульс напряжения отрицательной полярности (- u 2), а обмотки второй фазы импульс напряжения снимается. В результате полюса этой фазы приобретут полярность, как показано на рисунке 14.9, в, и ротор повернется против часовой стрелки еще на 90 0 (рисунок 14.9 г). При подаче импульса напряжения (+ u1) на обмотку первой фазы ротор заканчивает полный оборот и занимает исходное положение (рисунок 14.9, а). Работа шагового двигателя соответствует коммутации с раздельным включением обмоток фаз и разнополярными импульсами напряжения (+ u 1)→ (+ u 2)→ (– u 1)→ (– u 2)→ (+ u 1) и т.д. Если в рассмотренном двигателе применить коммутацию с раздельно- совместным включением обмоток фаз, то шаговый двигатель будет работать с угловым шагом α ш = 450, при этом вращающий момент на роторе возрастет примерно в 1, 5 раза.
Шаговые двигатели с активным ротором работают также с однополярными импульсами напряжения (что упрощает конструкцию коммутатора), но при этом число обмоток фазы на статоре (и число полюсов) увеличивается. По сравнению с реактивными шаговыми двигателями шаговые двигатели с активным ротором создают большие вращающие моменты, обеспечивают фиксацию ротора при снятии управляющего сигнала.
Недостаток двигателей с активным ротором – большой угловой шаг (15 - 900). Это объясняется технологическими трудностями изготовления ротора с постоянными магнитами при большом числе полюсов. Для уменьшения углового шага увеличивают число фаз в обмотке статора или применяют двухстаторную конструкцию. Двухстаторные двигатели имеют два одинаковых сердечника статора с одинаковыми обмотками, на валу размещены два ротора, при этом сердечники статоров смещены относительно друг другу на половину зубцового деления (роторы расположены сносно). Недостаток таких двигателей – сложность изготовления.
|
|