Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Лекція 7
|
|
СХЕМИ АВТОМАТИЧНОГО РЕГУЛЮВАННЯ ОСНОВНИХ ТЕХНОЛОГІЧНИХ ПАРАМЕТРІВ
До основних параметрів у технологічних процесах нафто-газовидобування, транспортування і переробки нафти та газу належать витрата, тиск, рівень, температура, якісні показники. Системи автоматичного курування типовими технологічними процесами реалізовані згідно ГОСТ 21.404.85. Умовні позначення засобів автоматизації згідно ГОСТ 21.404.85 приведені в додатку А.
Регулювання витрати
Витрата є найважливішим контрольованим і регульованим параметром у всіх технологічних процесах і є одночасно основним керуючим впливом для підтримування інших параметрів і фактично визначає матеріальні та енергетичні ресурси процесу.
Системи регулювання витрати мають такі особливості: мала інерційність ОК, наявність високочастотних пульсацій у потоці, зумовлених роботою помп і компресорів, нелінійність залежності степеня відкривання клапана (командного тиску на ВМ) і витратою, а також між витратою і перепадом тиску на звужуючому пристрої в каналі вимірювання.
Найчастіше ОК при регулюванні витрати – це дільниця трубопроводу між датчиком витрати та РО, тобто керуючий канал – це ”витрата речовини через датчик (витратомір) – витрата речовини через клапан”.
Наближено динаміка такого каналу описується передавальною функцією аперіодичної ланки з чистим запізненням
 (7.1)
(7.1)
Час чистого запізнення τ становить частку секунди для газу та декількасекунд для рідини, а постійна часу не перевищує декількох секунд. Це зумовлює необхідність застосування малоінерційних технічних засобів автоматизації і врахування їх динамічних характеристик при аналізі систем регулювання.
Оскільки на об’єкт керування безперервно діють високочастотні збурення, то без їх демпферування добитись якісного регулювання важко. В цих умовах найкраще використати звужуючи пристрої. Дифманометри –витратоміри також добре згладжують височастотні складові сигналу.
Найменшу інерційність мають індукційні (електромагнітні) витратоміри, але на їх вихідний сигнал найсильніше впливають високочастотні збурення.
Таким чином, в контурах регулювання витрати доцільно застосовувати звужуючі пристрої з дифманометрами і ротаметри, а в умовах вибухо- і пожежонебезпечних виробництв їх укомплектовують пневматичними дистанційними системами передачі, що дозволяє ще крім того і додатково згладжувати високочастотні збурення.
Додаткове демпферування в САР витрати може бути внесене вибором правильного закону регулювання. З цієї точки зору в контурах регулювання необхідно застосовувати регулятори з ПІ-законом регулювання (в окремих випадках допускаються П-регулятори, які мають невеликі демпферні властивості). Ні в якому разі не рекомендується застосовувати ПД- або ПІД-регулятори, оскільки це призведе до виникнення в САР високочастотних коливань великої амплітуди. Коефіцієнт підсилення регулятора установлюють як можна меншим.
Вище підкреслювалося, що на якість роботи АСР впливають нелінійності. Так, у звужуючому пристрої (діафрагмі) вихідна величина (перепад тиску Δ Р) в робочому діапазоні зв’язаний з вхідною величиною (витратою F) квадратичною залежністю:  . Ця нелінійність впливає на степінь стійкості системи при зміні витрати. Тому виникає необхідність забезпечення значного запасу стійкості системи або використання пристроїв лінеаризації, які, крім того, покращують якість перехідного процесу. Останній шлях є найперспективнішим.
. Ця нелінійність впливає на степінь стійкості системи при зміні витрати. Тому виникає необхідність забезпечення значного запасу стійкості системи або використання пристроїв лінеаризації, які, крім того, покращують якість перехідного процесу. Останній шлях є найперспективнішим.
Нелінійність РО можна зменшити шляхом спеціального профілювання дросельних пристроїв РО або вибором клапанів з лінійною витратною характеристикою.
Для регулювання (стабілізації) витрати рідини в трубопроводі використовуються два типи АСР. При створенні колекторного постачання рідиною, напору рідини за рахунок напірних ємностей і у випадку застосування центробіжних помп і компресорів використовують АСР, схема якої зображена на рис.7.2. Керуюча дія тут – зміна гідравлічного опору трубопроводу.


а) б)
1 – поршнева помпа; 2 – датчик витрати; 3 – регулятор;
4 – виконавчий механізм і регулюючий орган
Рисунок 7.1 – Типові АСР витрати
Однак при використанні поршневих і ротаційних помп доцільно застосовувати схему приведена на рис.7.1.б АСР на рис.7.1.а. не може бути застосована, адже повне перекриття РО потоку рідини, після таких насосів створюється високий тиск, який може викликати аварійну ситуацію.Тому для регулювання витрати тут використовують схеми регулювання витрати на балінасній лінії. Недоліком такої схеми є енергетичні витрати, викликані необхідністю завищення продуктивності помпи чи компресора. Тому для потужних помп застосовують схеми регулювання витрати шляхом зміни числа обертів приводу помпи, але це призводить до ускладнення схем керування.
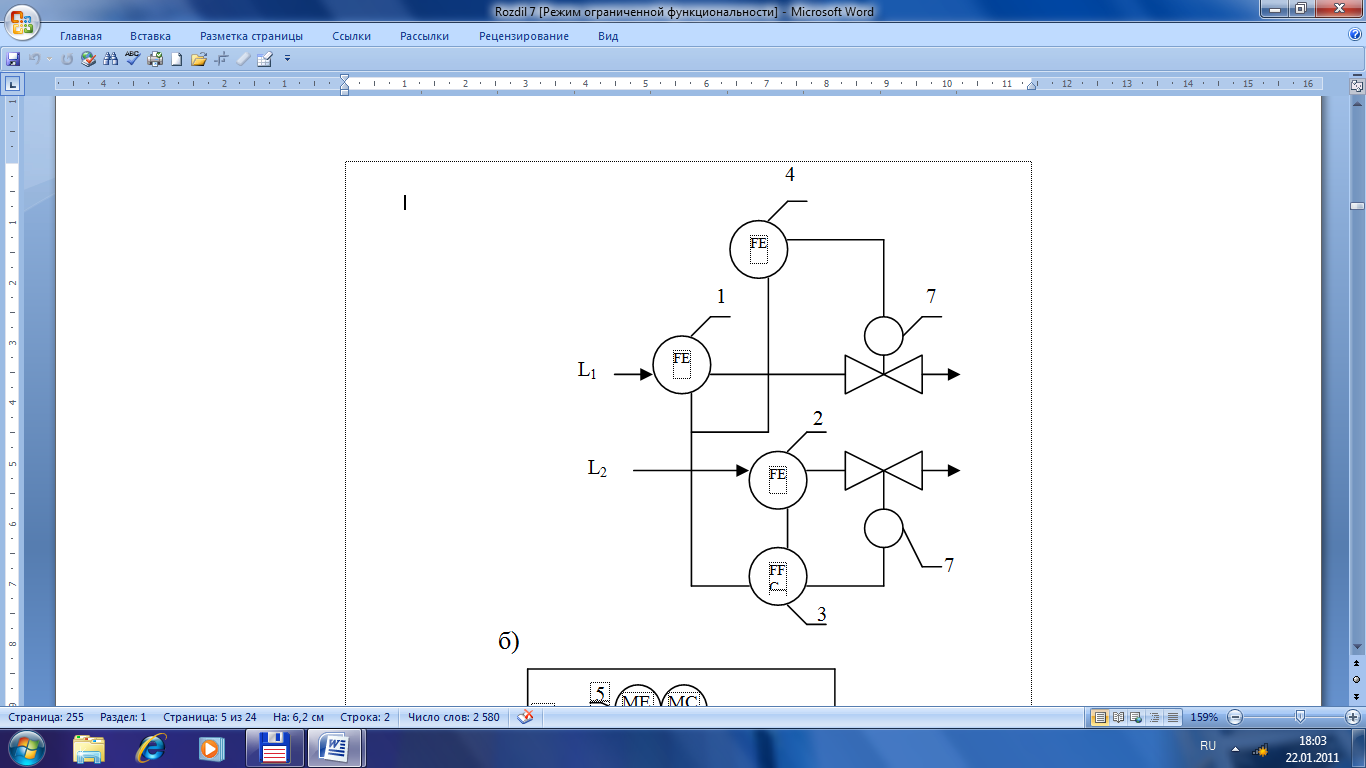
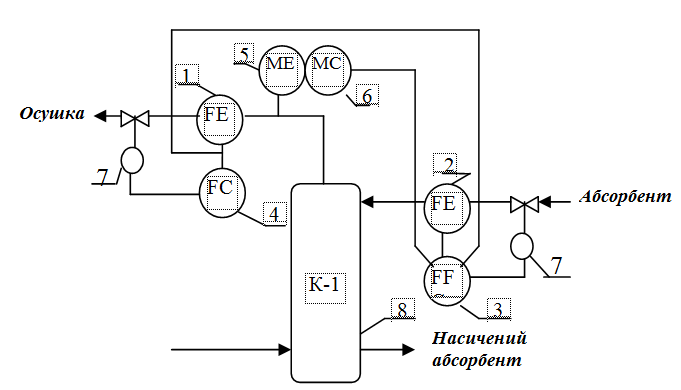
Розглянемо регулювання співвідношення витрат двох речовин. Такі схеми доцільно використовувати, наприклад, для підтримування заданого співвідношення витрат газ-абсорбент в системах керування процесом абсорбційної осушки газу. АСР такого типу можна реалізувати за однією з трьох схем (рис.7.2).

а)
б)
а) з незаданою загальною продуктивністю;
б) із заданою продуктивністю;
в) із заданою продуктивністю та корекцією коефіцієнта співвідношення за третім параметром:
|
|