Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Частотные преобразователи.
|
|
Основными элементами частотных преобразователей является генератор колебаний высокой частоты. Собственная частота колебательного контура с пренебрежимо малым электрическим сопротивлением, как известно, равна:
 , где L - индуктивность, C - ёмкость. Мы изучили ёмкостные и индуктивные датчики перемещений. Теперь, если включить такой ёмкостной или индуктивный датчик в колебательный контур, то перемещения можно измерять, регистрируя изменения собственной частоты колебательного контура. Этот способ измерений часто является предпочтительным, так как среди всех физических величин частота измеряется с максимальной точностью. При аппаратной реализации принципа частотного преобразования измеряемой величины можно применить компенсационный метод измерения. Например, при ёмкостном датчике регулируют индуктивность так, чтобы частота колебательного контура оставалась постоянной, и перемещения регистрируются по показаниям индуктивности.
, где L - индуктивность, C - ёмкость. Мы изучили ёмкостные и индуктивные датчики перемещений. Теперь, если включить такой ёмкостной или индуктивный датчик в колебательный контур, то перемещения можно измерять, регистрируя изменения собственной частоты колебательного контура. Этот способ измерений часто является предпочтительным, так как среди всех физических величин частота измеряется с максимальной точностью. При аппаратной реализации принципа частотного преобразования измеряемой величины можно применить компенсационный метод измерения. Например, при ёмкостном датчике регулируют индуктивность так, чтобы частота колебательного контура оставалась постоянной, и перемещения регистрируются по показаниям индуктивности.
Схема электросилового токового преобразователя изображена на рис, 1.8.
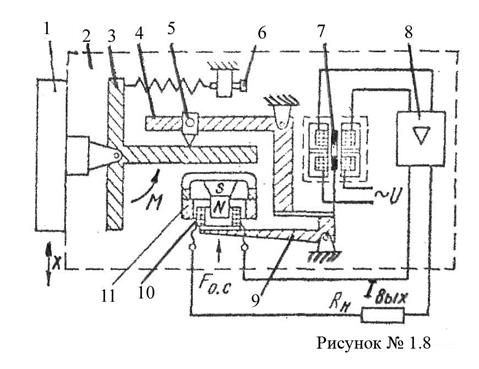
Рис. Силовой токовый преобразователь
На рисунке представлена схема силового токового преобразователя, применяемого для измерения силы или момента силы. Из рисунка видно, что преобразователь представляет собой систему рычагов, уравновешенную пружиной, натяжение которой регулируется винтом 6. Действие силы или момента силы М приводит к перемещению чувствительного элемента 1., Перемещение элемента 1 передается в собственно электросиловой преобразователь 2 в виде крутящего момента М, приложенного к рычагу 3. Через упор 5 и рычаг 4 входное усилие изменяет положение флажка (сердечника) дифференциально-трансформаторного индикатора рассогласования 7. Мы изучали принцип действия трансформаторного преобразователя раньше. Это индукционный преобразователь перемещений. Возникающий во вторичной обмотке индикатора 7 ток поступает на усилитель тока 8. Усиленный ток Iвых из усилителя 8 поступает в электромагнитное устройство обратной связи 10, 11по двум проводам. В один провод включено сопротивление нагрузки Rн. Устройство обратной связи представляет собой неподвижно закрепленный постоянный магнит 11, в который вдвигается токовая катушка 10, расположенная на рычаге 9. При изменении входного усилия система рычагов приходит в движение, и в результате изменяется положение флажков дифференциального индикатора рассогласования 7. Ток на выходе усилителя 8 Iвых, протекающий в катушке 10 устройства обратной связи, возрастает и тем самым меняется усилие притяжения этой катушки к магниту 11.. Полярность выходного тока Iвых, выбрана такой, чтобы усилие притяжения возвращало систему рычагов силового токового преобразователя в исходное положение. Наступает новое состояние равновесия в системе рычагов, при котором изменение входного усилия скомпенсировано изменением усилия обратной связи. Соотношение между изменениями входной величины — момента М и выходной — тока Iвых, (т. е. коэффициент передачи преобразователя) может варьироваться перемещением упора 5 по рычагу 4. Нуль прибора (нулевое значение выходного тока) устанавливается корректором нуля 6. Величина возвращающей силы определяется путём измерения падения напряжения U = Rн·Iвых на сопротивлении Rн, включённом в цепь измерительной обратной связи. Таким образом, измерительная информация получается с помощью измерительной обратной связи по методу компенсации измеряемой силы.
|
|