Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Способы определения МС с помощью БРЛС (угломерный, дальномерный, угломерно-дальномерный).
|
|
С помощью БРЛС можно определить МС гораздо точнее, чем обзорно-сравнительным способом. Для этого на экране локатора нужно измерить курсовой угол и дальность до ориентира.
Курсовой угол ориентира (КУО, ψ) – это угол, заключенный между продольной осью ВС и направлением на ориентир (рис. 9.9). Это по сути то же самое, что КУР, только вместо радиостанции ориентир.
На экране локатора КУО - это угол между курсовой чертой (она направлена по продольной оси ВС) и направлением на ориентир от центра экрана. Отсчитать значение КУО можно по делениям и оцифровке, нанесенной на краю экрана. Правда, точность такого измерения не очень высока, СКП составляет около 1, 5º.
Дальность до РЛО определяется с помощью меток дальности. Если считать, что на рис. 8.9 изображение соответствует масштабу 50 км (расстояние от центра до края экрана) и, следовательно, интервал между метками дальностей 10 км, то удаление первого РЛО примерно 38 км, а второго около 44 км. Понятно, что если РЛО находится между метками дальности, то пилоту приходится интерполировать дальность, и точность определения дальности будет зависеть от его глазомера. Если интервал между метками 10 км, то можно ошибиться на 1-2 км, а если этот интервал (на другом масштабе) 50 км, то погрешность будет значительно больше. Наибольшая точность будет, когда РЛО находится прямо на метке дальности. В зависимости от масштаба СКП измерения дальности может составлять от 1 до 4 км.
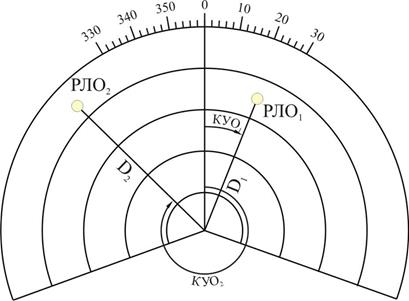
Рис. 9.9. Курсовые углы и дальности ориентиров
С помощью БРЛС измеряют наклонную дальность и в принципе ее необходимо пересчитать в горизонтальную. Но это имеет смысл делать лишь при небольших удалениях. Например, если высота полета 10 км, а наклонная дальность 40 км, то горизонтальная дальность составит 38, 7 км, то есть будет отличаться от наклонной на 1, 3 км. Поэтому, если дальность не пересчитывать, то погрешность из-за этого будет сравнима с погрешностью измерения самой этой наклонной дальности. А на больших удалениях она будет гораздо меньше.
Дальность сама по себе уже является навигационным параметром, а с помощью КУО можно рассчитать пеленг самолета. Поэтому даже по одному РЛО можно определить два навигационных параметра, что достаточно для определения МС. Но на экране можно наблюдать одновременно несколько РЛО, поэтому определить МС можно разными способами. Это практически те же способы, которые были рассмотрены применительно к другим навигационным средствам. Например, если мы знаем, как определить МС с помощью пеленга и дальности, полученных с помощью VOR/DME, то точно так же можно определить МС по пеленгу и дальности, полученным с помощью БРЛС. Не имеет значения, с помощью какого именно средства получены эти два навигационных параметра. В этом и состоит достоинство обобщенного метода линий положения.
1) Угломерно-дальномерный способ (по курсовому углу и дальности).
Для его применения достаточно наблюдать один РЛО (например, одинокий остров в океане). По экрану БРЛС измеряются КУО и дальность до ориентира. При необходимости дальность пересчитывается в горизонтальную, а по КУО и курсу рассчитывается истинный пеленг самолета. Расчет ИПС производится точно так же как, как и рассмотренный ранее расчет ИПС по курсовому углу радиостанции (КУР), ведь не имеет значения, курсовой угол чего именно мы измерили – радиостанции или ориентира.
Если измерен магнитный курс, то
ИПС=МК+КУО±180+Δ М+(λ рло-λ)sin φ ср,
Здесь также магнитное склонение берется в месте вероятного местоположения ВС, а последний член формулы предназначен для перехода от истинного меридиана ВС к истинному меридиану РЛО – ведь именно от него на карте будет прокладываться пеленг.
После расчета на карте прокладываются ЛРПС и ЛРР и в точке их пересечения определяется место самолета (рис. 9.10).
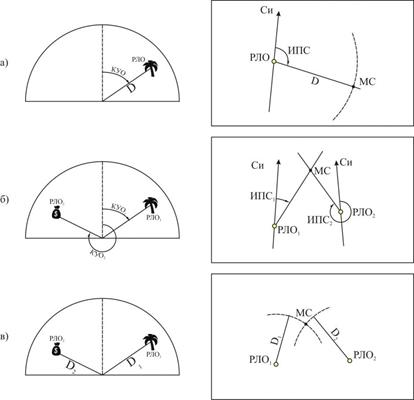
Рис. 9.10. Способы определения МС по БРЛС на карте: а) угломерно-дальномерный, б) угломерный, в) дальномерный
2) Угломерный способ (по двум курсовым углам).
Может быть использован, когда по каким-то причинам метки дальности на экране не видны. Выбираются два РЛО и для каждого из них рассчитывается ИПС по приведенной выше формуле. Чтобы точность определения была выше, следует выбирать такие РЛО, чтобы разность их курсовых углов была ближе к 90°. Место самолета определяется в точке пересечения двух проложенных на карте ЛРПС (см. рис. 9.10, б).
3) Дальномерный способ (по двум дальностям ориентиров).
По меткам дальности до двух РЛО определяются дальности и на карте прокладываются соответствующие им ЛРР в виде окружностей (см. рис. 9.10, в). Хотя курсовые углы ориентиров не измеряются, РЛО также следует выбирать так, чтобы разность КУО была ближе к 90°. Ведь этой величине и будет равен угол пересечения линий положения, а от него зависит точность определения МС.
|
|