Главная страница Случайная страница
Разделы сайта
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Общие принципы работы навигационных приёмников
|
|
Потребительский сегмент систем GPS и ГЛОНАСС составляют приёмники сигналов спутников. Навигационный приёмник можно разделить на три функциональные части:
· радиочастотную часть;
· цифровой~коррелятор;
· процессор.
С выхода антенно-фидерного приемника сигнал поступает на радиочастотную часть (рисунок 5). Основная задача этой части заключается в усилении входного сигнала, фильтрации, преобразовании частоты и аналого-цифровом преобразовании. Помимо этого, с радиочастотной части приёмника поступает тактовая частота для цифровой части приёмника. С выхода радиочастотной части цифровые отсчёты входного сигнала поступают на вход цифрового коррелятора.

Рисунок 5 – Обобщённая структура приёмника
В корреляторе спектр сигнала переносится на " нулевую" частоту. Это производится путём перемножения входного сигнала коррелятора с опорным гармоническим колебанием в синфазном и квадратурном каналах. Далее результат перемножения проходит корреляционную обработку путём перемножения с опорным дальномерным кодом и накоплением на периоде дальномерного кода. В итоге получаем корреляционные интегралы I и Q. Отсчёты корреляционных интегралов поступают в процессор для дальнейшей обработки и замыкания петель ФАП (фазовая автоподстройка) и ССЗ (схема слежения за задержкой). Измерения параметров сигнала в приёмнике производятся не непосредственно по входному сигналу, а по его точной копии, формируемой системами ФАП и ССЗ. Корреляционные интегралы I и Q позволяют оценить степень коррелированности опорного и входного сигналов. Задача коррелятора, помимо формирования интегралов I и Q, - формировать опорный сигнал, согласно с управляющими воздействиями, поступающими с процессора. Кроме того, в некоторых приёмниках коррелятор формирует необходимые измерения опорных сигналов и передаёт их в процессор для дальнейшей обработки. В то же время, так как опорные сигналы в корреляторе формируются по управляющим кодам, поступающим с процессора, то необходимые измерения опорных сигналов можно производить непосредственно в процессоре.
Дальность при радиотехнических измерениях характеризуется временем распространения сигнала от объекта измерения до измерительного пункта. В навигационных системах GPS/ГЛОНАСС излучение сигналов синхронизировано со шкалой времени системы, точнее, со шкалой времени спутника, излучающего данный сигнал. В то же время, потребитель имеет информацию о расхождении шкалы времени спутника и системы. Цифровая информация, передаваемая со спутника, позволяет установить момент излучения некоторого фрагмента сигнала (метки времени) спутником в системном времени. Момент приёма этого фрагмента определяется по шкале времени приёмника. Шкала времени приёмника формируется с помощью кварцевых стандартов частоты, поэтому наблюдается постоянный " уход" шкалы времени приёмника относительно шкалы времени системы. Разность между моментом приёма фрагмента сигнала, отсчитанным по шкале времени приёмника, и моментом излучения его спутником, отсчитанным по шкале спутника, умноженная на скорость света, называется псевдодальностью [4].
Корреляционные интегралы, формируемые в корреляторе, позволяют отследить модуляцию сигнала спутника символами информации и вычислить метку времени во входном сигнале. Метки времени следуют с периодичностью 6 с для GPS и 2 с для ГЛОНАСС. В пределах одного деления этой шкалы периоды дальномерного кода образуют 1-мс шкалу. Одна миллисекунда разделена, в свою очередь, на отдельные элементы (chips, в терминологии GPS): для GPS - 1023, для ГЛОНАСС - 511. Таким образом, элементы дальномерного кода позволяют определить дальность до спутника с погрешностью ~300 м. Для более точного определения необходимо знать фазу генератора дальномерного кода. Схемы построения опорных генераторов коррелятора позволяют определять его фазу с точностью до 0, 01 периода, что составляет точность определения дальности 3м.
Сегмент потребителей включает приемники GPS или ГЛОНАСС и сообщество самих пользователей. Навигационная аппаратура потребителя (НАП) принимает сигналы, обрабатывает их, измеряет и определяет радионавигационные параметры, вычисляет геоцентрические координаты Х, У, Z и на их основе - геодезические координаты и высоту над опорным эллипсоидом в системе координат ПЗ-90 (возможна также работа в системах WGS-84, СК-42, Гаусса-Крюгера и др.), поправку к местной шкале времени Т относительно системного времени GPS ГЛОНАСС и составляющие вектора скорости. Можно выделить следующие виды навигационного оборудования. Это персональные навигаторы, навигаторы для наземного транспорта, Для морских и речных судов, авиации, геодезическая аппаратура, аппаратура функциональных дополнений, аппаратура космического базирования, радиомаяки. Целью работы является анализ систем персонального применения.
В качестве примера можно рассмотреть навигационный приемник NV08C-MCM разработанный компанией «НАВИС». Внешний вид приёмника показан на рисунке 1 Приложения В. NV08C-MCM – это миниатюрный встраиваемый модуль приема сигналов глобальных навигационных спутниковых систем (ГНСС). Ключевой особенностью устройства является его способность работать как с ГНСС, которые уже развернуты GPS и ГЛОНАСС, так и с ГНСС GALILEO и COMPASS, а также с сигнала их функциональных дополнений SBAS. NV08C-MCM был разработан для использования в высокопроизводительных приложениях, критичных к стоимости и потреблению энергии:
- в автомобильных и карманных персональных навигаторах;
- спутниковых автосигнализациях;
- в системах наблюдения и безопасности.
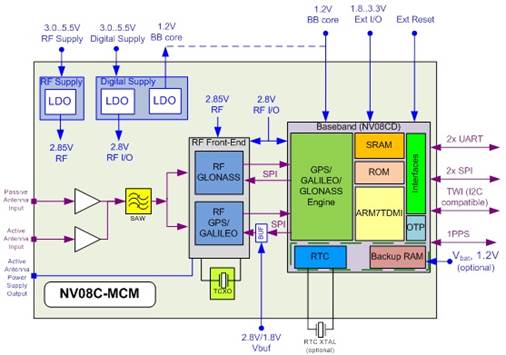
Рисунок 6 – Структурная схема приемника NV08C-MCM
NV08C-MCM обеспечивает высокую чувствительность и быстрое получение первого решения навигационной задачи в сочетании с низким энергопотреблением и малыми размерами. Принимаемые сигналы - GPS/GALILEO/COMPASS/SBAS: L1 1575.42 MHz ГЛОНАСС: L1 1597.5…1609.5 MHz, имеет 32 канала слежения. Точность получения навигационных параметров (RMS) составляет:
- в плоскости:
- в автономном режиме 2.5 м;
- в дифференциальном режиме 1 м;
- высоты 3 м;
- скорости 0.05 м/с;
- времени (1PPS) ±25 нс.
Приемник (рисунок 6) имеет интерфейсы 2x RS-232E, I/O порт (1.8...3.3 В CMOS-уровень), - 2x SPI, TWI (I2C совместимый), - 1PPS выдача (CMOS уровень). Частота выдачи данных составляет до 230 400 бит/с. На основании измерений параметров опорного гармонического колебания, формируемого системой ФАП, определяют частоту и фазу несущего колебания спутника. Его уход относительно номинального значения даст доплеровское смещение частоты, по которому оценивается скорость потребителя относительно спутника. Кроме того, фазовые измерения несущей позволяют уточнить дальность до спутника с погрешностью в несколько мм.
Существует большое количество навигационных приемников различных типов. Можно выделить геодезические, авиационные, морские, персональные навигационные приемники. В данной работе ограничимся системами отображения картографической информации персонального назначения. Можно выделить несколько систем такого типа.
Во- первых, это персональные GPS или ГЛОНАСС навигаторы, используемые в первую очередь как автомобильные или туристические навигаторы. Обеспечивают большинство функций предустановленных автопроизводителем устройств, а также имеют некоторые специфические особенности. Их плюсы – компактность, малый вес, возможность переставлять с автомобиля на автомобиль, поэтому для многих лучший GPS навигатор - именно такой. GPS-навигатор может служить не только штурманом, но и выполнять функции Bluetooth-телефона, MP3-плейера, FM-приемника. Все такие GPS навигаторы снабжены разъемом для 12-вольтового автомобильного аккумулятора. Батарея также позволяет заранее задать маршрут. Некоторые модели имеют обычный AC-разъем для использования в доме и перезарядки, а также USB-порт. Отдельным классом персональных приёмников являются военные приемники. К ним предъявляются специфические требования.
Следующим типом персональных навигационных систем являются системы на основе смартфонов или коммуникаторов оснащенные соответствующим аппаратным и программным обеспечением. В условиях, когда портативность и энергоэкономичность не играют особой роли, то используются навигационные системы на основе ноутбуков и нетбуков с подключаемыми внешними приемниками.
|
|